この記事は設計こばなし Advent Calendar 2023の7日目(12/7分)です。
概要
書籍 【組込みソフトウェア開発のための構造化プログラミング】 に記載の設計・コードに感銘を受けました。
このコードを写経し、組込み装置で実際に動かして書籍の設計を学びたいと思いました。
写経したコードで実際に動いている動画がつぎになります。
※組込みソフトウェア開発のための構造化プログラミング
動作確認環境
書籍の対象ハードウェアはレゴマインドストームNXTでした。レゴマインドストームNXTは持っていないのでレゴマインドストームEV3を使うことにしました。
EV3について
EV3の組立て
EV3はETロボコンのロボットHackEVとしました。
こちらが組立てたHackEVです。

HackEVの組立てはこちらの組立て図を参考にしました。
ソフトウェア開発環境
こちらのETロボコンの環境を使わせてもらうことにしました。
OS
ソフトウェア開発環境でインストールされるRTOS TOPPERS/EV3RTを利用しました。
インストールされたバージョンは確認時点(2023/11/10)の最新版でした。
- バージョン: リリース1.1
- 最終更新日: 2021年06月25日
TOPPERS/EV3RTのリリース履歴はこちらに記載があります。
コード
写経したコードはつぎのGitHubリポジトリに置きました。
設計図
書籍で紹介されているのはライントレースを行うロボットです。
こちらはソースコードから作成した構造図はつぎになります。
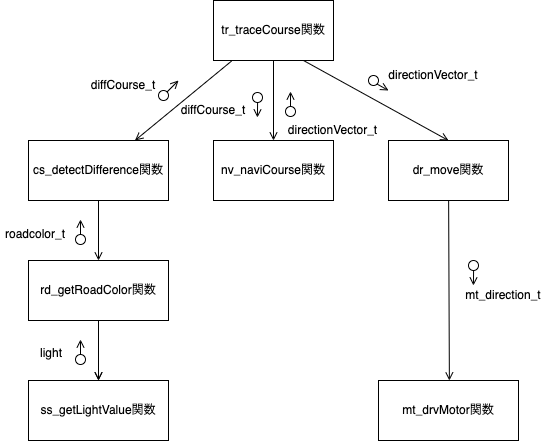
ざっくりとコードを説明します。
- tr_traceCourse関数:トップの関数
- cs_detectDifference関数: コースのズレを検知する
- nv_naviCourse関数: コースを決めてモータを駆動する
tr_traceCourse関数は20msごとに呼び出しています。
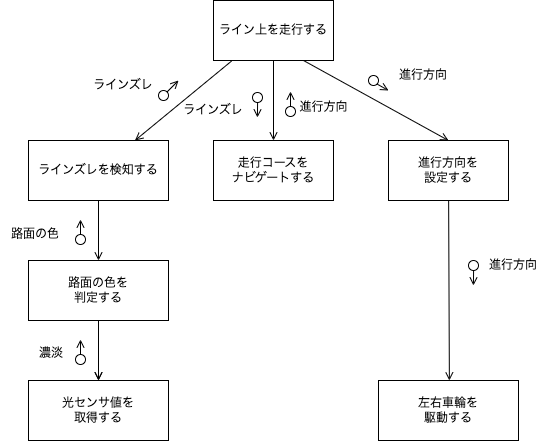
こちらは自然言語で書かれた構造図です。
書籍の設計の良いところ
書籍で紹介されている設計の良いところを紹介します。
深くまで追わなくても動きを予測できる
tr_traceCourse関数というトップ関数からは、3つの関数を呼び出しています。
コースのズレを検知して、コースをナビゲートして駆動するという動きを予測できます。
何をしているのか予測できる関数は理解しやすい良い関数です。
関数名のわかりやすさ
たとえばcs_detectDifference関数関数(コースとのズレを検出する)は動詞 + 目的語の組み合わせで簡潔に機能を示しています。
入力部と出力部が分割されている
ライントレースの入力は自然言語で書かれた構造図でいうとつぎになります。
- 【光センサ値を取得】する
- 光センサの濃淡から【路面の色を判定する】
- 判定した路面の色から【ラインズレを検知する】
出力はつぎになります。
- 進行方向を設定する
- 左右車輪を駆動する
真ん中の【走行コースをナビゲートする】はラインズレを入力として受け取り、進行方向を決めて出力部に渡しています。
左側から得た入力を真ん中で変換し、右側で出力するという流れでわかりやすい良い構造です。
単方向の依存性になっている
構造図を見ると上位の階層が呼び出している下位の階層のモジュールにだけ依存しているので良い設計です。
同じ階層での横のつながりがない
同じ階層で横のつながりがなく、良い設計です。
モジュールで何をしているのかがわかる
自然言語の構造図のモジュール名は「〜を・・・する」という形式で書かれているため、一目で何をしているかがわかる良い命名です。