初投稿です。
2020年8月にkickstarter OpenCV AI Kit でクラウドファウンディングされていたAIステレオカメラが届いたのでレポートです。
入手まで
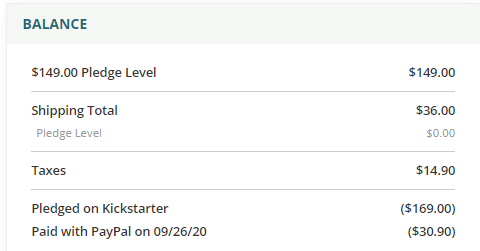
2020年8月にkickstarter OpenCV AI Kit で$149+20(送料)でpledgeしました。
成立後に追加で、送料オーバ分16ドル税14.9ドルで、最終的に199.9ドルです。
今は、https://store.opencv.ai/で買えるようです。
構成物
写真の通り。
電源は5.0V-3.0Aで世界各国用のコネクタがついてます。
少なくともチュートリアルのデモレベルなら、電源なしのUSBバスパワーで動きます。

インストール作業
基本、同梱されたカードのURLに書かれたサイトのチュートリアルに従うのみです。
以下はwindows10のケースです。python3.9インストール済。
-
PowerShellを管理者モードで開く
-
実行ポリシーを設定する
Set-ExecutionPolicy Bypass -Scope Process -Force; [System.Net.ServicePointManager]::SecurityProtocol = [System.Net.ServicePointManager]::SecurityProtocol -bor 3072; iex ((New-Object System.Net.WebClient).DownloadString('https://chocolatey.org/install.ps1'))
- chocoでまとめてインストール
choco install cmake git python pycharm-community -y
- pipでdepthai入れる
python -m pip install depthai
depthAI デモの準備
- depthaiを適当なフォルダにclone
git clone https://github.com/luxonis/depthai.git
cd depthai
- 必要ライブラリのチェック用スクリプトを実行する ※公式だと仮想環境での実行を推奨
python install_requirements.py
depthAI デモの実行結果
- demoスクリプトを実行する (要カメラ接続)
python depthai_demo.py
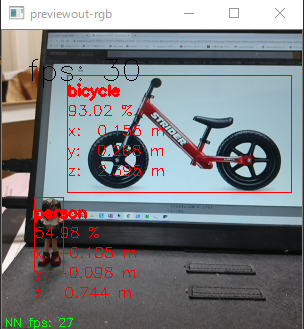
mobilenetの20class分類で検出した物体までの距離が表示されます。
Zが奥行方向でしょうか。
画像は50cm程度手前からの撮影です。
人形(person)までの距離はまあまあですが、画面上のバイクまでの距離は誤差大です。
近距離すぎて視差が取れていないのかも。
DEPTH画像
先程のdepthai_demo.pyにオプションを付与することでdepth画像の出力も可能です。
python .\depthai_demo.py -s metaout depth_raw -bb

- 同画角の可視画像
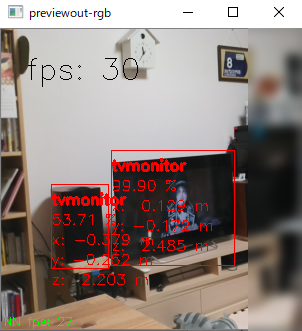
視差は、一般的なステレオでよく見る感じで、まあまあ取れてそうです。
物体検出の精度は、スピーカーをテレビモニタと間違っているように割と微妙。
OpenVINOのその他のモデルを使うチュートリアルもあるので、差し替えれば簡単に良くなるとは思っています。
まとめ
動くところまでは簡単に確認できました。
測距離の誤差要因は、パッシブステレオの特性、アルゴリズム的なもの、キャリブレーション不足、など色々考えられます。
今後はチュートリアルを進めつつ、サンプルコードの中身も読んだ上で、性能を引き出せるようにしていきます。
参考文献
https://docs.luxonis.com/en/latest/pages/api/
https://docs.luxonis.com/en/latest/pages/tutorials/pretrained_openvino/