どうも PSS がちょいちょい狂ったり BME-280 が見えなくなったりするので GPS レシーバの設定を調整する。
BN-880 を設定する。 の詳細、リトライ版。
以下、UART1 (1) の入出力設定を変更する。
ちなみに番号とインターフェイスの対応は
0:I2C, 1:UART1, 2:UART2, 3:USB, 4:SPI
Configuration View を開く
CFG (Configuration) を選び設定を初期化
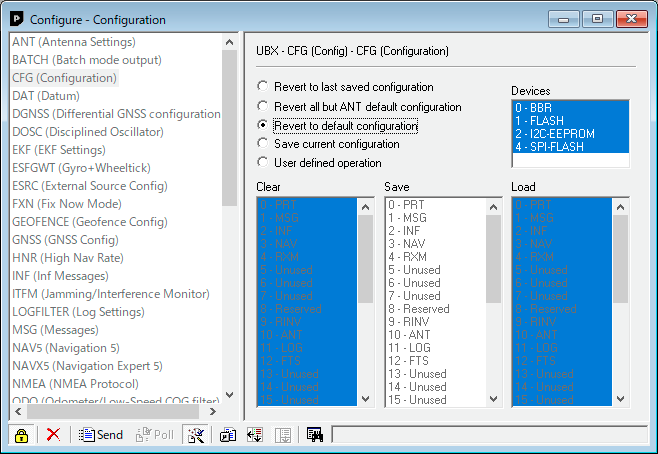
Revirt to default configuration を選択し右側の Devices の全てを選択。
左下の Send をクリック。
一旦ケーブルを抜いて GPS レシーバをリセット。
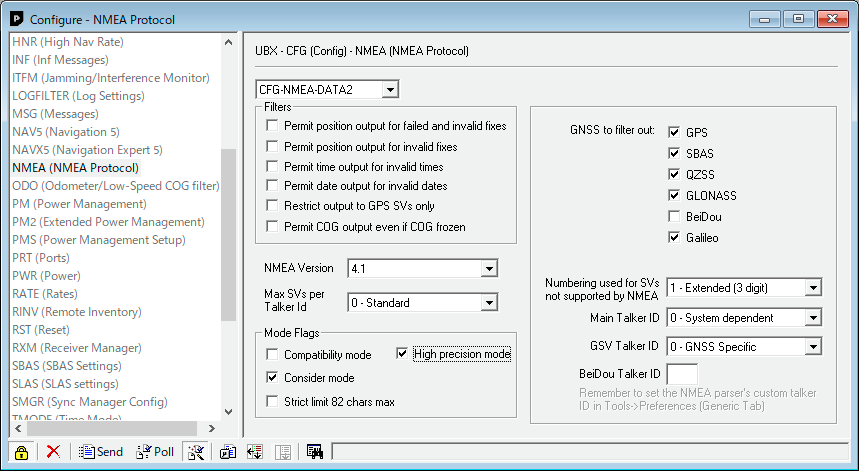
受信衛星を選択
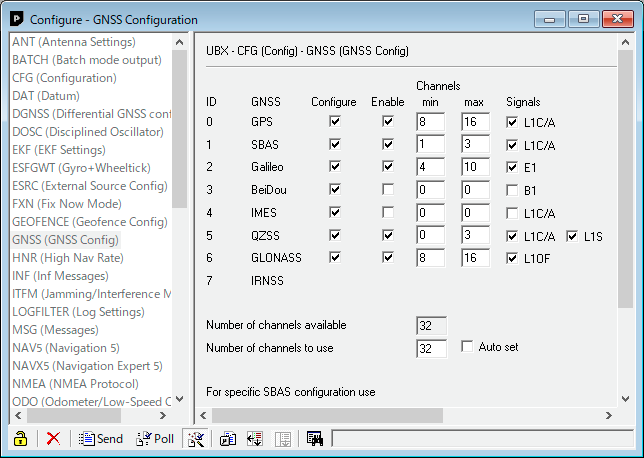
GPS (SBAS, QZSS), Galileo, GLONASS を選択。
BeiDou (北斗) は受信しないので Enable を外し 0 にしておく。
IMES は屋内用 (ビルの中、地下街など GPS を受信できないところ向けの信号) の信号なので同じく Enable を外し 0 に。
Galileo の max は 10 に増やしておく。
QZSS の L1S も受信できるのでチェックを入れておく。
左下の Send
MSG (Messages) の 01-30 NAV-SVINFO を選択
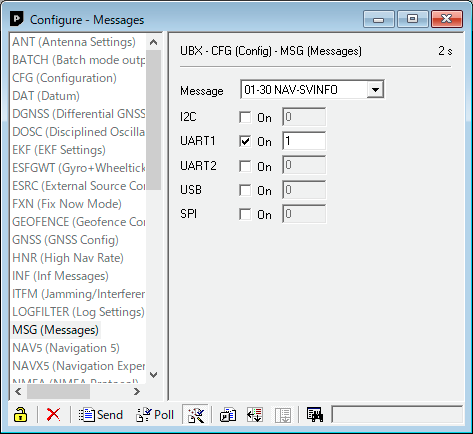
UART1 を選択し Send
捕捉した衛星の情報を u-box 形式で送信する (NEMA 形式で送れないものを含む)
GPS レシーバーから送信するメッセージを選択
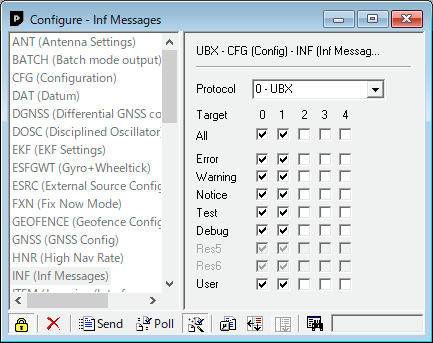
Protocol: 0 - UBX を選択
Target 0(I2C), 1(UART1), 2(UART2), 3(USB), 4(SPI)
のうち、1 の ALL を選択して Send。
Protocol: 1 - NEMA を選択
1 の ALL を選択して Send。
※必要でないかも?よく分からない。
なんとなく設定してみた。
良く分からない。
PPS の設定
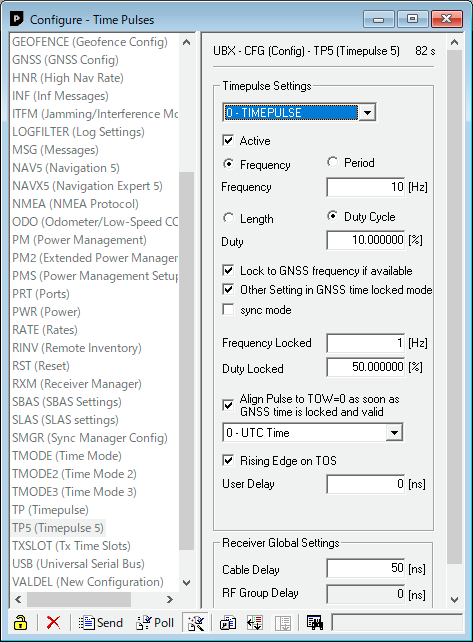
PPS が同期していない間は 10Hz のデューイ比 1:9 のパルスを出力し、同期すると 1Hz とデューイ比を 1:1 のパルスを出力する。
Rising Edge on TOS のチェックを外す (キャプチャでは入れ忘れました。時刻を立ち上がりにするか、立下りにするか。)
捕捉する衛星の仰角を指定
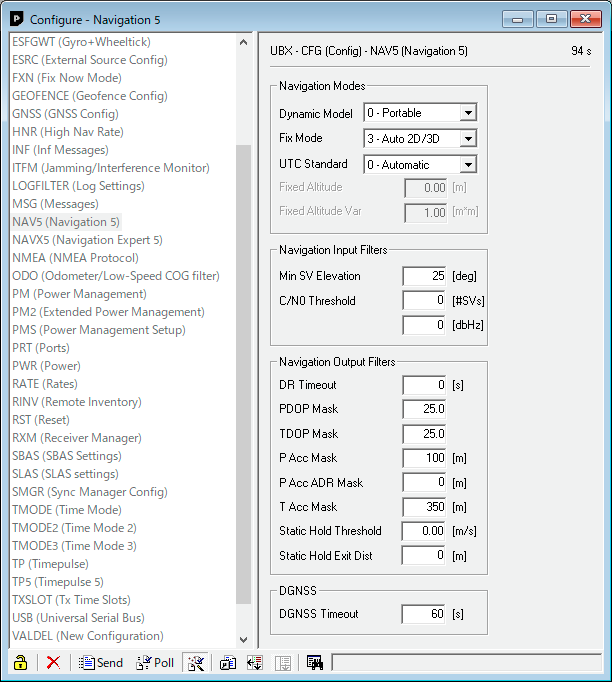
Min SV Elevtion を 25° に。
低いところの衛星の電波は長い距離を伝わってくる (=大気の影響を大きく受ける) & マルチパスになって精度が下がるため低緯度の衛星は排除する。(どの程度衛星を捕捉できるかで調整する)
通信プロトコルと通信速度を設定。
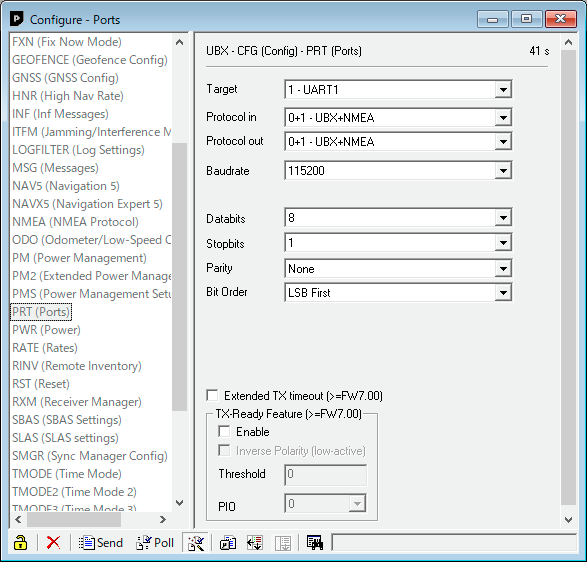
Target 1 - UART1
in/out は UBX + NEMA
Baudrate 115200
に設定して Send
PMS (Power Management Setup)
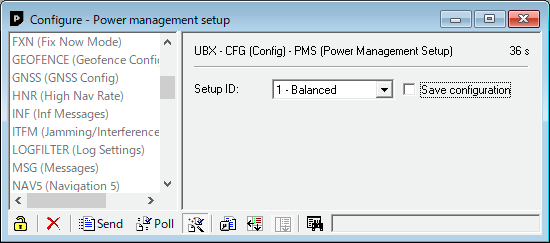
Raspberry Pi は電源環境が厳しいので 0 - Full Powe ではなく 1 - Balanced (デフォルト) に設定する。
RXM (Receiver Manager)
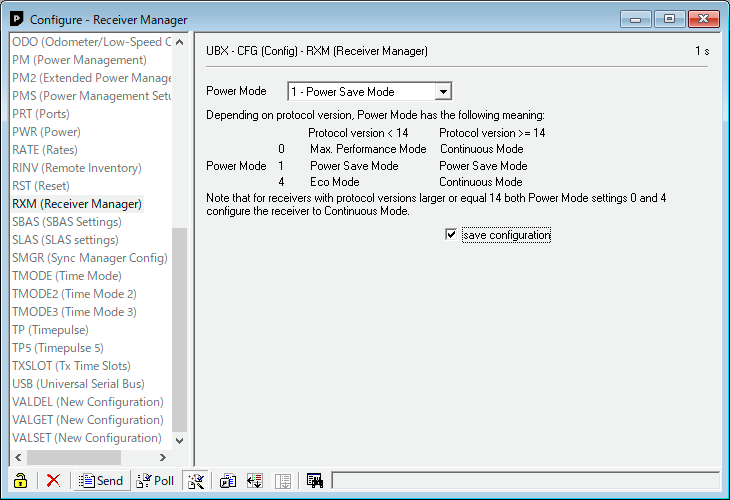
ここにも 1 - Power Save Mode との表示があるのでそうしておく。(デフォルト値 0 - Continuos mode)
保存!
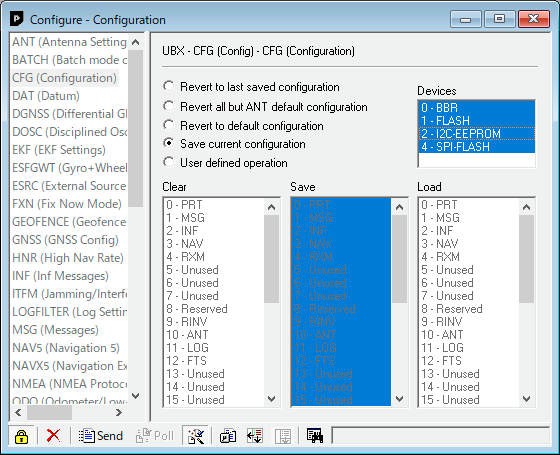
Save current configuration を選択し send
これで、電源を切っても設定が保存される。(これをするまでは保存されない)