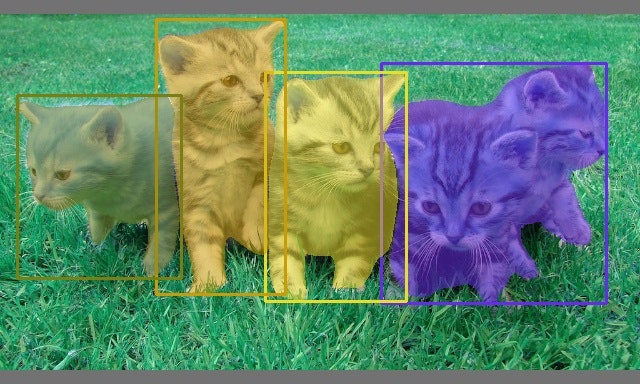
同じ種類のオブジェクトでも一つ一つ区別してくれるインスタンスセグメンテーションがyolov7で使えます。
方法
必要なライブラリのインストール。
git clone -b mask https://github.com/WongKinYiu/yolov7
cd yolov7
pip install -r requirements.txt
git clone https://github.com/facebookresearch/detectron2
mv ./detectron2 ./detectron
mv ./detectron/detectron2 ./
pip install fvcore
pip install omegaconf
pip install timm
wget https://github.com/WongKinYiu/yolov7/releases/download/v0.1/yolov7-mask.pt
pip install torchvision==0.10.1
pip install torch==1.9.1
推論
image_path = 'cats.jpg'
import matplotlib.pyplot as plt
import torch
import cv2
import yaml
from torchvision import transforms
import numpy as np
from utils.datasets import letterbox
from utils.general import non_max_suppression_mask_conf
from detectron2.modeling.poolers import ROIPooler
from detectron2.structures import Boxes
from detectron2.utils.memory import retry_if_cuda_oom
from detectron2.layers import paste_masks_in_image
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
with open('data/hyp.scratch.mask.yaml') as f:
hyp = yaml.load(f, Loader=yaml.FullLoader)
weigths = torch.load('yolov7-mask.pt')
model = weigths['model']
model = model.half().to(device)
_ = model.eval()
image = cv2.imread(image_path) # 504x378 image
image = letterbox(image, 640, stride=64, auto=True)[0]
image_ = image.copy()
image = transforms.ToTensor()(image)
image = torch.tensor(np.array([image.numpy()]))
image = image.to(device)
image = image.half()
output = model(image)
inf_out, train_out, attn, mask_iou, bases, sem_output = output['test'], output['bbox_and_cls'], output['attn'], output['mask_iou'], output['bases'], output['sem']
bases = torch.cat([bases, sem_output], dim=1)
nb, _, height, width = image.shape
names = model.names
pooler_scale = model.pooler_scale
pooler = ROIPooler(output_size=hyp['mask_resolution'], scales=(pooler_scale,), sampling_ratio=1, pooler_type='ROIAlignV2', canonical_level=2)
output, output_mask, output_mask_score, output_ac, output_ab = non_max_suppression_mask_conf(inf_out, attn, bases, pooler, hyp, conf_thres=0.25, iou_thres=0.65, merge=False, mask_iou=None)
pred, pred_masks = output[0], output_mask[0]
base = bases[0]
bboxes = Boxes(pred[:, :4])
original_pred_masks = pred_masks.view(-1, hyp['mask_resolution'], hyp['mask_resolution'])
pred_masks = retry_if_cuda_oom(paste_masks_in_image)( original_pred_masks, bboxes, (height, width), threshold=0.5)
pred_masks_np = pred_masks.detach().cpu().numpy()
pred_cls = pred[:, 5].detach().cpu().numpy()
pred_conf = pred[:, 4].detach().cpu().numpy()
nimg = image[0].permute(1, 2, 0) * 255
nimg = nimg.cpu().numpy().astype(np.uint8)
nimg = cv2.cvtColor(nimg, cv2.COLOR_RGB2BGR)
nbboxes = bboxes.tensor.detach().cpu().numpy().astype(np.int)
pnimg = nimg.copy()
for one_mask, bbox, cls, conf in zip(pred_masks_np, nbboxes, pred_cls, pred_conf):
if conf < 0.25:
continue
color = [np.random.randint(255), np.random.randint(255), np.random.randint(255)]
pnimg[one_mask] = pnimg[one_mask] * 0.5 + np.array(color, dtype=np.uint8) * 0.5
pnimg = cv2.rectangle(pnimg, (bbox[0], bbox[1]), (bbox[2], bbox[3]), color, 2)
from google.colab.patches import cv2_imshow
cv2_imshow(pnimg)
cv2.imwrite('result.jpg',pnimg)
推論Colab
🐣
フリーランスエンジニアです。
お仕事のご相談こちらまで
rockyshikoku@gmail.com
機械学習、ARアプリ(Web/iOS)を作っています。
機械学習/AR関連の情報を発信しています。