前回、BLEペリフェラルの投げるデータは文字列でした。今度は実数を扱います。
ペリフェラル
Nicla Sense MEボードでクオータニオンの四つの値を実数で送る記事です。
Nicla Sense MEをデータ入力に使う①クオータニオンのデータをBLEで出力するペリフェラル
プログラムです。
# include "Arduino.h"
# include "Arduino_BHY2.h"
# include <ArduinoBLE.h>
SensorQuaternion quater(SENSOR_ID_RV);
// BLE Service
# define BHI260_SERVICE1_UUID "F000AA30-0451-4000-B000-000000000000"
BLEService Sensor_BHI260_Service1(BHI260_SERVICE1_UUID);
// BLE Characteristic
# define BHI260_QuaterX_Characteristic_UUID "F000AA5A-0451-4000-B000-000000000000"
# define BHI260_QuaterY_Characteristic_UUID "F000AA5B-0451-4000-B000-000000000000"
# define BHI260_QuaterZ_Characteristic_UUID "F000AA5C-0451-4000-B000-000000000000"
# define BHI260_QuaterW_Characteristic_UUID "F000AA5D-0451-4000-B000-000000000000"
BLEFloatCharacteristic BHI260_QuaternionX(BHI260_QuaterX_Characteristic_UUID, BLERead | BLENotify);
BLEFloatCharacteristic BHI260_QuaternionY(BHI260_QuaterY_Characteristic_UUID, BLERead | BLENotify);
BLEFloatCharacteristic BHI260_QuaternionZ(BHI260_QuaterZ_Characteristic_UUID, BLERead | BLENotify);
BLEFloatCharacteristic BHI260_QuaternionW(BHI260_QuaterW_Characteristic_UUID, BLERead | BLENotify);
// BLE Descriptor
# define BHI260_Quater_Descriptor_UUID "2901"
BLEDescriptor BHI260_Quater_Descriptor(BHI260_Quater_Descriptor_UUID, "Quaternion x,y,z,w IEEE754 binary32");
# define localNAME "Nicla_BHI260"
# define DeviceNAME "NiclaBLE"
float previousMillis = 0; // last time value was checked, in ms
void setup(){
Serial.begin(115200);
while(!Serial);
BHY2.begin();
quater.begin();
if (!BLE.begin()) {
Serial.println("starting BLE failed!");
while (1);
}
BLE.setLocalName(localNAME);
BLE.setDeviceName(DeviceNAME);
//// set the service
BLE.setAdvertisedService(Sensor_BHI260_Service1);
// add characteristic
Sensor_BHI260_Service1.addCharacteristic(BHI260_QuaternionX);
Sensor_BHI260_Service1.addCharacteristic(BHI260_QuaternionY);
Sensor_BHI260_Service1.addCharacteristic(BHI260_QuaternionZ);
Sensor_BHI260_Service1.addCharacteristic(BHI260_QuaternionW);
// add descriptor
BHI260_QuaternionX.addDescriptor(BHI260_Quater_Descriptor);
// add service
BLE.addService(Sensor_BHI260_Service1);
// set initial value for this characteristic ; PASS
// start advertising
BLE.advertise();
Serial.println("\nBluetooth device active, waiting for connections...");
}
void loop(){
// wait for a BLE central
BLEDevice central = BLE.central();
// if a central is connected to the peripheral:
if (central) {
delay(100);
Serial.print("\nConnected to central: ");
// print the central's BT address:
Serial.println(central.address());
// check data every 200ms
// while the central is connected:
while (central.connected()) {
long currentMillis = millis();
// if 200ms have passed, check value:
if (currentMillis - previousMillis >= 200) {
previousMillis = currentMillis;
updateValue();
//delay(1000);
}
}
// when the central disconnects
Serial.print("Disconnected from central: ");
Serial.println(central.address());
goto brout;
}
brout: ;
}
void updateValue() {
BHY2.update();
delay(500);
Serial.println(String("Quaternion : x,y,z,w ") + String(quater.x(),3) + ", " + String(quater.y(),3) + ", " + String(quater.z(),3)+ ", "+ String(quater.w(),3));
BHI260_QuaternionX.writeValue(quater.x());
BHI260_QuaternionY.writeValue(quater.y());
BHI260_QuaternionZ.writeValue(quater.z());
BHI260_QuaternionW.writeValue(quater.w());
}
matlabのセントラル
次の記事の、実数に戻す処理を数値で記述したプログラムを利用します。
Nicla Sense MEをデータ入力に使う②クオータニオンのデータをBLEで受け取るセントラル
clear
scan = blelist("Timeout", 20);
Nicla_address = "9313D63DDE91"; % scanで見つかったアドレスを代入
b = ble(Nicla_address);
% Nicla_BHI260
ServiceUUID = "F000AA30-0451-4000-B000-000000000000";
BHI260_QuaterX_Characteristic_UUID = "F000AA5A-0451-4000-B000-000000000000";
BHI260_QuaterY_Characteristic_UUID = "F000AA5B-0451-4000-B000-000000000000";
BHI260_QuaterZ_Characteristic_UUID = "F000AA5C-0451-4000-B000-000000000000";
BHI260_QuaterW_Characteristic_UUID = "F000AA5D-0451-4000-B000-000000000000";
f11 = characteristic(b, ServiceUUID, BHI260_QuaterX_Characteristic_UUID);
subscribe(f11); % Notify
f12 = characteristic(b, ServiceUUID, BHI260_QuaterY_Characteristic_UUID);
subscribe(f12);
f13 = characteristic(b, ServiceUUID, BHI260_QuaterZ_Characteristic_UUID);
subscribe(f13);
f14 = characteristic(b, ServiceUUID, BHI260_QuaterW_Characteristic_UUID);
subscribe(f14);
stopTimer = 200;
disp('start');
figure;
tic;
while(toc < stopTimer)
rotators = read_IMU(f11, f12, f13, f14);
poseplot(quaternion(rotators), MeshFileName="plane3.stl",scaleFactor=0.3);
view([50 50 -10]);
end
unsubscribe(f11);
unsubscribe(f12);
unsubscribe(f13);
unsubscribe(f14);
clear b
function binary32 = IEEE754(fourDigit) % IEEE754の単精度浮動小数点数の形式:binary32
dataBigendian = uint32(bitshift(fourDigit(1), 24) + bitshift(fourDigit(2), 16) + bitshift(fourDigit(3), 8) + fourDigit(4));
sign = power(-1, double(bitget(dataBigendian,32)));
fraction = 1.0 + double(bitshift(uint32(bitshift(uint32(bitshift(dataBigendian,1)) , 8)), -9)) / 8388608.0; % 仮数
exponents = double(2^(double(double(bitshift(bitshift(dataBigendian,1), -24))-127.0))); % 指数
binary32 = sign * fraction * exponents;
%fprintf(" sign %.1f fraction %.4f exponents %.4f ",sign,fraction,exponents);
end
function Q = read_IMU(f11, f12, f13, f14)
x = IEEE754(flip(read(f11))); % little endian->big endian
y = IEEE754(flip(read(f12)));
z = IEEE754(flip(read(f13)));
w = IEEE754(flip(read(f14)));
Q = [w x y z];
end
Simulinkのfunction
function用に書き換えました。仮数、指数を求めるところは、コンパイラのエラーが出ないように変更しました。
function quater = fcn()
% automatically initialized to []
persistent b;
persistent f11;
persistent f12;
persistent f13;
persistent f14;
%persistent quater;
% extrinsic declarations
coder.extrinsic('ble');
coder.extrinsic('characteristic');
coder.extrinsic('read');
coder.extrinsic('subscribe');
if isempty(b)
Nicla_address = "9313D63DDE91"; % scanで見つかったアドレスを代入
b = ble(Nicla_address);
ServiceUUID = "F000AA30-0451-4000-B000-000000000000";
BHI260_QuaterX_Characteristic_UUID = "F000AA5A-0451-4000-B000-000000000000";
BHI260_QuaterY_Characteristic_UUID = "F000AA5B-0451-4000-B000-000000000000";
BHI260_QuaterZ_Characteristic_UUID = "F000AA5C-0451-4000-B000-000000000000";
BHI260_QuaterW_Characteristic_UUID = "F000AA5D-0451-4000-B000-000000000000";
f11 = characteristic(b, ServiceUUID, BHI260_QuaterX_Characteristic_UUID);
subscribe(f11); % Notify
f12 = characteristic(b, ServiceUUID, BHI260_QuaterY_Characteristic_UUID);
subscribe(f12);
f13 = characteristic(b, ServiceUUID, BHI260_QuaterZ_Characteristic_UUID);
subscribe(f13);
f14 = characteristic(b, ServiceUUID, BHI260_QuaterW_Characteristic_UUID);
subscribe(f14);
end
% initialize output
%quater = [0 0 0 0];
quater = read_IMU(f11, f12, f13, f14)';
end
function binary32 = IEEE754(fourDigit) % IEEE754の単精度浮動小数点数の形式:binary32
coder.extrinsic('bitshift');
coder.extrinsic('bitget');
coder.extrinsic('bitand');
D4 = 0;
D3 = 0;
D2 = 0;
D1 = 0;
D4 = bitshift(double(fourDigit(1)), 24);
D3 = bitshift(double(fourDigit(2)), 16);
D2 = bitshift(double(fourDigit(3)), 8);
D1 = double(fourDigit(4));
%dataBigendian = 0;
dataBigendian = double( D4+ D3 + D2 + D1 );
S0 = 0;
S0 = bitget(dataBigendian,32);
%sign =0 ;
sign = power(-1, double(S0));
F9 = 0;
F9 = bitand(dataBigendian, double(0x7FFFFF));
%fraction = 0;
fraction = 1.0 + F9 / 8388608.0; % 仮数
E2 = 0;
E23 = 0;
E2= bitand(dataBigendian, double(0x7F800000));
E23 = bitshift(E2,-23);
exponents = double(2^(double(E23-127.0))); % 指数
binary32 = sign * fraction * exponents;
end
function Q = read_IMU(f11, f12, f13, f14)
coder.extrinsic('read');
coder.extrinsic('flip');
x = IEEE754(flip(read(f11))); % little endian->big endian
y = IEEE754(flip(read(f12)));
z = IEEE754(flip(read(f13)));
w = IEEE754(flip(read(f14)));
Q = [w x y z];
end
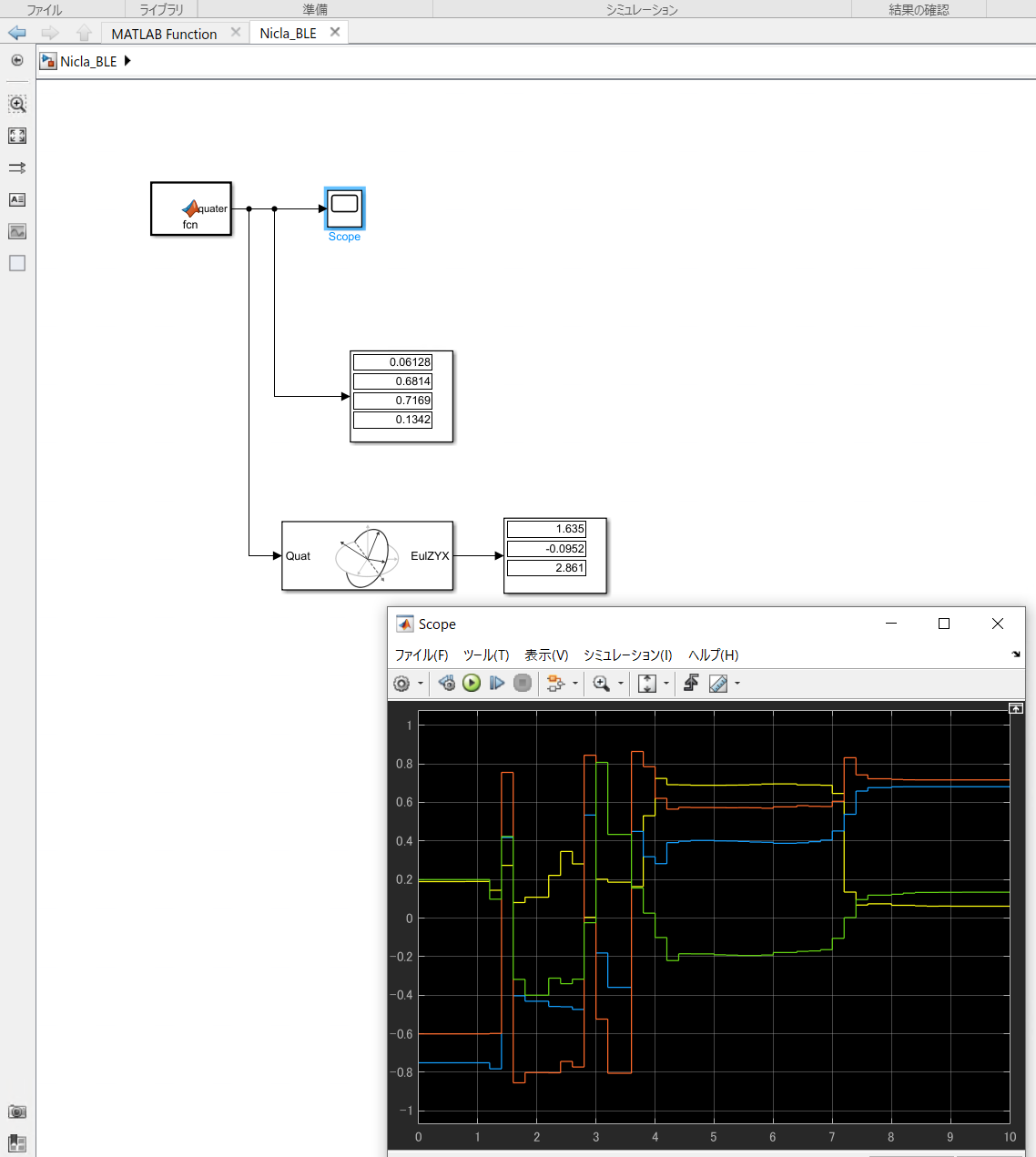
実行中のブロック図です。一番下のブロックはクオータニオンをオイラー角に変換しています。正しいかどうかは不明です。クオータニオンの出力は、上から、w、x、y、zです。
データを送っているArduinoのシリアルモニタの様子です。