CANopenの2回目のテストベンチです。最初の部分は、TRINAMIC社とほぼ同じ構成です。
PC側のCANインターフェース
入手性、日本法人があるなどの理由からIXXATのUSB-to_CAN V2 Compactをマルツで入手しました。付属のビューワcanAnalyser3 Miniでは、CANopenのプロトコルを見ることはできません。接続したPCのOSはWindows10 12H1です。

購入したモデルのCAN接続口は、一般的なDサブ9ピンです。130Ω(120Ωがなかったので)の終端を取り付けたケーブルを自作しました。終端は、モータ側にもつけています。まったく終端を入れないと、同期をとるためのスタッフィング信号のエラーが多発しました。CANopenの物理層はCANバスです。ツイストペア線で、複数の機器がぶら下がります。両端には終端抵抗を入れます。
近距離だとモータ側には終端なくても通信できるようです。

使用したモータ
オリエンタルモーター のブラシレスモーターBLVシリーズ Rタイプを使います。
BLMR5100K-A-B+BLVD-KRD
<モータBLMR5100K-A-B>
- 定格出力(連続) 100 W
- 電源入力 定格電圧 DC24~48 V
- 電源入力 定格入力電流 2.6(48 V)~5.1 A(24 V)
- 定格トルク(モータ軸) 0.319 N・m
- 速度制御範囲 1-4000 r/min
- 許容慣性モーメントJ 23×10-4kg・m2
- モーター部 質量 1.1 kg
<コントローラBLVD-KRD>
- PCとの接続 USBマイクロコネクタ
- 上位接続 Modbus(RS-485)、CANopen
<サポート・ソフト(無償) BLST01>
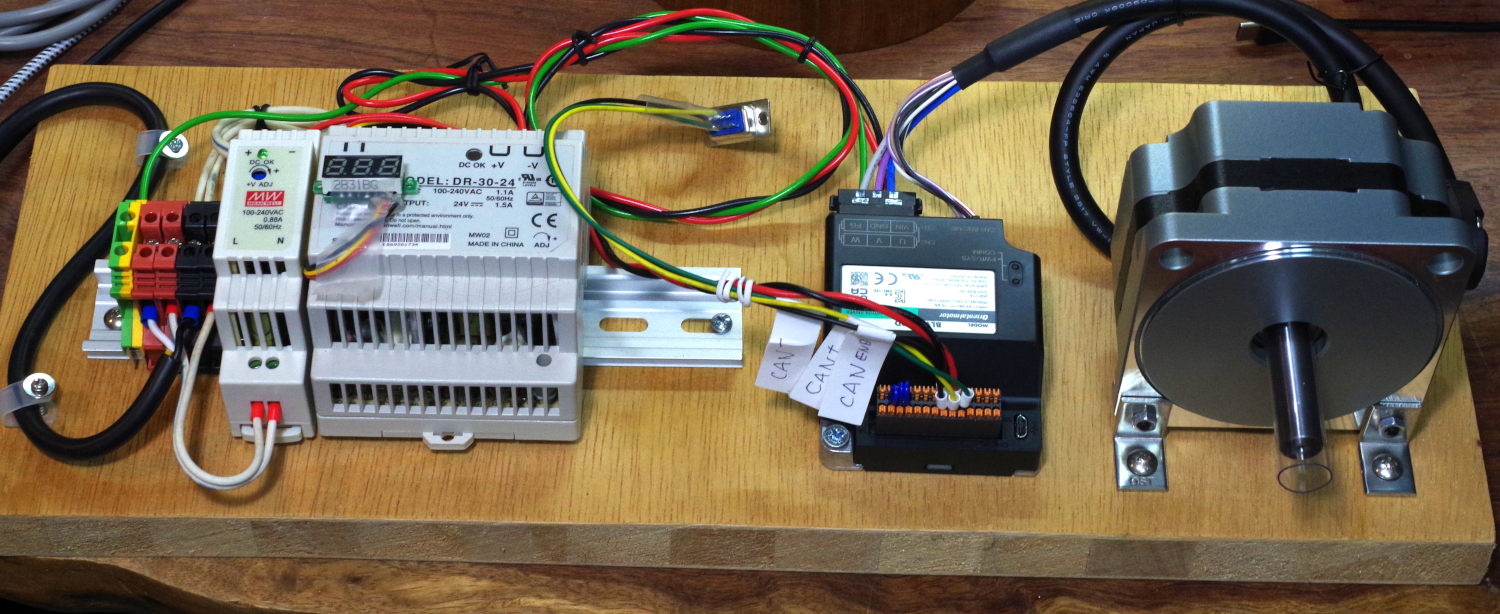
使用した電源
DINレール用の、モータBLMR5100K-A-B用には24V 1.5A、コントローラBLVD-KRD用には24V 0.63Aを使いました。モータの電源は、専用のLC03D06Aケーブルを使いました。
接続
モータとコントローラは専用のケーブルでつなぎます。UVWの電源と、エンコーダ/電磁ブレーキのコネクタが用意されています。延長用が「接続ケーブル」で、交換用が「可動接続ケーブル」と呼ばれているようです。近距離ならば、別途購入は不要です。
マニュアルHP-5139J.pdfの6項に従ってコネクタを差し込みます。
28ピンのCN4コネクタは、5ピンがCAN_L、6ピンがCAN_H、7ピンがCAN_GND、20ピンNET-VIN(コントローラ24V)、21ピンNET-GND(コントローラGND)をつなぎます。
マニュアルは、https://www.orientalmotor.co.jp/products/detail.action?hinmei=BLMR5100K-A-B%2BBLVD-KRD&seriesCd=FJ01&additionalHinmei=CCM010B1AAF#option01 からダウンロードできます。