CANopenは、制御のためにオブジェクト・ディクショナリが規定されています。大きく分けて、
- 0000台 NMT(Network Management Object)
- 1000台 コミュニケーション・プロファイル(CANopen ネットワークの通信に関するオブジェクト)
- 2000台 メーカ固有ドライブ・プロファイル
- 6000台 CiA402ドライブ・プロファイル(モーション)
があります。SDOではいずれも読み書きの対象になっています。細かく、それも膨大な数があります。メーカによって解釈も異なります。
PythonのCANopenライブラリ
解説 CANopen for Python
ソース christiansandberg/canopen
Windows10(21H2)にインストールします。
$ pip install canopen
CANバスには、次の装置がつながっています。PCのCANインターフェースはIXXATのUSB-to_CAN V2 Compact(CAN Bit Rate 1000)です。
- ノードID 7 Beckhoof IO-Link IP1001 B510-0000
- ノードID 2 TRINAMIC ステッピング・モータPD42-1270
- ノードID 10 オリエンタルモーター コントローラBLVD-KRD、モータBLMR5100K-A-B
- ノードID 9 Maxon EPOS2、42BLF01 DCブラシレス・モータ
- ノードID 5 Maxon EPOS4、100W with encoder
最初に、Beckhoof IO-Link IP1001 B510-0000にアクセスします。最初にEDSファイルを入手しておきます。ファイルはデスクトップに置いています。デスクトップでpythonを動かしています。
import canopen
import time
# Start with creating a network representing one CAN bus
network = canopen.Network()
node = canopen.RemoteNode(7,'IP10xx-B51x.eds')
network.add_node(node)
# Connect to the CAN bus
network.connect(bustype='ixxat', channel=0, bitrate=1000000)
# Reset network
node.nmt.state = 'RESET COMMUNICATION'
time.sleep(0.5)
node.nmt.state = 'RESET'
time.sleep(3)
node.nmt.send_command(0x1) # NMT start
network.check()
print('node state 1) = {0}'.format(node.nmt.state))
print("\n start network")
print("\nstart ID=7 beckhoff")
print("- - -")
device_name = node.sdo[0x1008].raw
print('Device name ',device_name)
Hardware_version = node.sdo[0x1009].raw
print('Hardware version ',Hardware_version)
Software_version = node.sdo[0x100a].raw
print('Software version ',Software_version)
print("- - -")
print("\nDisconnect")
# Disconnect from CAN bus
network.disconnect()
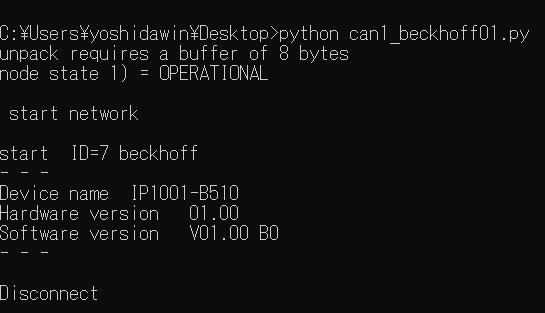
実行例です。
そのほかのモータのデータを読み出す
適当なオブジェクト・ディクショナリ値を読み出しています。
import canopen
import time
# Start with creating a network representing one CAN bus
network = canopen.Network()
# Add some nodes with corresponding Object Dictionaries
node = canopen.RemoteNode(10,'BLVD-KRD_CANopen_V100.eds')
network.add_node(node)
# Connect to the CAN bus
network.connect(bustype='ixxat', channel=0, bitrate=1000000)
print("\n===start ID=10 OrientalMotor")
device_name = node.sdo[0x1008].raw
print('Device name ',device_name)
Motor_temp = node.sdo[0x407d].raw
print('Motor_temp ',float(Motor_temp/10.0))
print("")
Max_torqe = node.sdo[0x6072].raw
print('Max torqe',Max_torqe)
Target_position = node.sdo[0x607a].raw
print('Target position',Target_position)
Software_position_limit_min = node.sdo[0x607d][1].raw
print('Software position limit min',Software_position_limit_min)
Software_position_limit_max = node.sdo[0x607d][2].raw
print('Software position limit max',Software_position_limit_max)
Positioning_option_code = node.sdo[0x60f2].raw
print('Positioning option code',Positioning_option_code)
Profile_velocity = node.sdo[0x6081].raw
print('Prfile velocity',Profile_velocity)
End_velocity = node.sdo[0x6082].raw
print('End velocity ',End_velocity )
Profile_acceleration = node.sdo[0x6083].raw
print('Prfile acceleration',Profile_acceleration)
Profile_deceleration = node.sdo[0x6084].raw
print('Profile deceleration ',Profile_deceleration )
Quick_stop_deceleration = node.sdo[0x6085].raw
print('Quick stop deceleration',Quick_stop_deceleration)
Quick_stop_option_code = node.sdo[0x605a].raw
print('Quick stop option code',Quick_stop_option_code)
Halt_option_code = node.sdo[0x605d].raw
print('Halt option code',Halt_option_code)
Position_window = node.sdo[0x6067].raw
print('Position window',Position_window)
Following_error_window = node.sdo[0x6065].raw
print('Following error window',Following_error_window)
# Disconnect from CAN bus
network.disconnect()
node = canopen.RemoteNode(2,'TMCM-1270.eds')
network.add_node(node)
# Connect to the CAN bus
network.connect(bustype='ixxat', channel=0, bitrate=1000000)
print("\n===start ID=2 Trinamic")
#print(network[node_id])
vendor_id = node.sdo[0x1018][1].raw
Product_code = node.sdo[0x1018][2].raw
Revision_number = node.sdo[0x1018][3].raw
print('vendor_id ',vendor_id)
print('Product_code ',Product_code)
print('Revision_number ',Revision_number)
print("")
# Disconnect from CAN bus
network.disconnect()
node = canopen.RemoteNode(9,'maxon_motor_EPOS2_2123h_6220h_0000h_0000h.eds')
network.add_node(node)
# Connect to the CAN bus
network.connect(bustype='ixxat', channel=0, bitrate=1000000)
print("\n===start ID=9 maxon EPOS2")
#print(network[node_id])
vendor_id = node.sdo[0x1018][1].raw
Product_code = node.sdo[0x1018][2].raw
Revision_number = node.sdo[0x1018][3].raw
print('vendor_id ',vendor_id)
print('Product_code ',Product_code)
print('Revision_number ',Revision_number)
print("")
Motor_Type = node.sdo[0x6402].raw
print('Motor Type 10:Sinusoidal PM BL, 11:Trapezoidal PM BL motor ',Motor_Type)
Continuous_Current_Limit = node.sdo[0x6410][1].raw
print('Continuous Current Limit ',Continuous_Current_Limit)
Pole_Pair_Number = node.sdo[0x6410][3].raw
print('Pole Pair Number ',Pole_Pair_Number)
Thermal_Time_Constant_Winding = node.sdo[0x6410][5].raw
print('Thermal Time Constant Winding ',Thermal_Time_Constant_Winding)
Encoder_Pulse_Number = node.sdo[0x2210][1].raw
print('Encoder Pulse Number ',Encoder_Pulse_Number)
Position_Sensor_Type = node.sdo[0x2210][2].raw
print('Position Sensor Type ',Position_Sensor_Type)
Current_Regulator_PGain = node.sdo[0x60f6][1].raw
print('Current Regulator P-Gain ',Current_Regulator_PGain)
Current_Regulator_IGain = node.sdo[0x60f6][2].raw
print('Current Regulator I-Gain ',Current_Regulator_IGain)
acceleration = node.sdo[0x6083].raw
print('acceleration ',acceleration)
deceleration = node.sdo[0x6084].raw
print('deceleration ',deceleration)
node.sdo[0x6081].raw = 0x03e8 # Profile velocity 1000
velocity = node.sdo[0x6081].raw
print('velocity ',velocity)
print("")
# Disconnect from CAN bus
network.disconnect()
node = canopen.RemoteNode(5,'maxon_motor_EPOS4_0170h_6050h_0000h_0000h.eds')
network.add_node(node)
# Connect to the CAN bus
network.connect(bustype='ixxat', channel=0, bitrate=1000000)
print("\n===start ID=5 maxon EPOS4")
#print(network[node_id])
vendor_id = node.sdo[0x1018][1].raw
Product_code = node.sdo[0x1018][2].raw
Revision_number = node.sdo[0x1018][3].raw
print('vendor_id ',vendor_id)
print('Product_code ',Product_code)
print('Revision_number ',Revision_number)
print("")
Motor_Type = node.sdo[0x6402].raw
print('Motor Type 10:Sinusoidal PM BL, 11:Trapezoidal PM BL motor ',Motor_Type)
acceleration = node.sdo[0x6083].raw
print('acceleration ',acceleration)
deceleration = node.sdo[0x6084].raw
print('deceleration ',deceleration)
print("")
# Disconnect from CAN bus
network.disconnect()
実行結果です。EPOS2/4は、設定データを読み込んでいないので、データ自体は正しいものでない可能性があります。

オブジェクト・ディクショナリの資料
- Beckhoof IO-Link IP1001 B510-0000;Documentation Fieldbus Box for CANopen
- TRINAMIC ステッピング・モータPD42-1270;PD-1270 CANopen Firmware Manual
- オリエンタルモーター コントローラBLVD-KRD、モータBLMR5100K-A-B;HP-5143E.pdf
- Maxon EPOS2、42BLF01 DCブラシレス・モータ;Microsoft Word - EPOS2 Application Note Device Programming_J.DOC
- Maxon EPOS4、100W with encoder;EPOS4 Firmware Specification