前回、ハードの準備ができました。ここでは、TwinCAT3を使ってマニュアルでモータを回すところまでを説明します。第4回とほぼ同じ内容になります。
TwinCAT3の起動
TwinCAT3をインストールしたPCを立ち上げると、最初、常駐部が起動されます。そのあと、TwinCAT3のアイコンをダブルクリックして立ち上げます。
新しいプロジェクトを選びます。

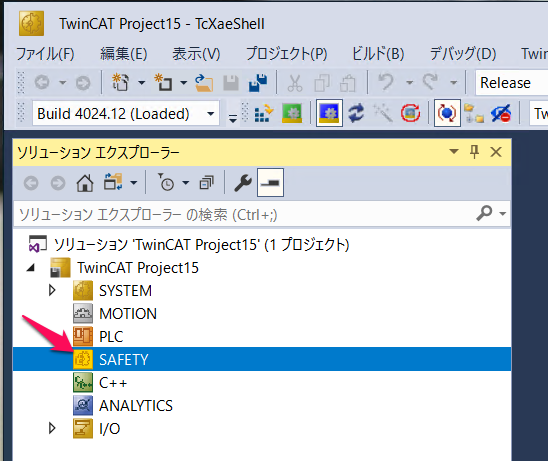
左のソリューションエクスプローラーのメニューから、SAFTYを右クリックして非表示を選びます。同様に、C++、ANALYTICSも非表示にします。たんに使わないからです。
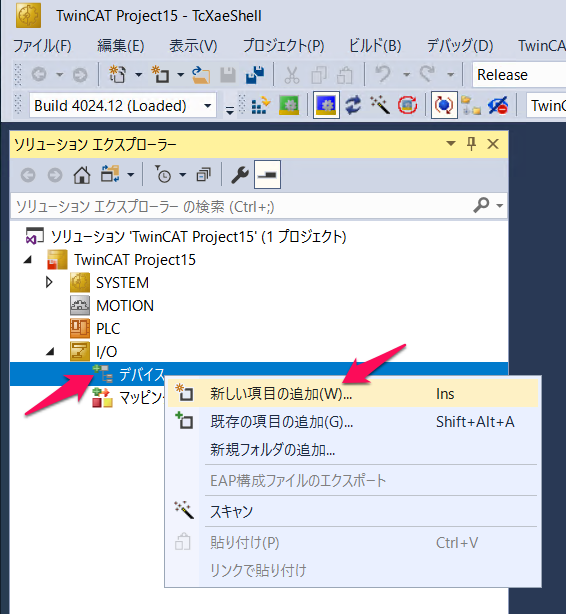
I/Oからデバイスを右クリックし、新しい項目の追加を選択します。
EtherCATマスタを選択してOKを押します。

デバイス検出個所のパネルが出ます。EtherCATで動くネットワークカードを選択します。

ソリューションエクスプローラーのデバイス1(EtherCAT)をダブルクリックし、真ん中のエリヤに表示された情報からアダプタのタブを選択した画面です。

scanする
ソリューションエクスプローラーのデバイス1(EtherCAT)を右クリックすると、scanのメニューが見えています。見えないときは、ここまでの作業が失敗しています。

EPOS4を見つけたときに、1軸だけなので、NC-構成を選択します。

モジュール類を全部見つけてきました。

軸1の各項目を設定
軸1をダブルクリックし、パラメータのタブを開きます。モータに合わせて適切な値を入れます。モータのことがよくわかっていないので、適当な数値を入れています。
その他の設定の中にあるデッドタイム補正値は6ms程度のようです。小さすぎると貫通電流が流れ?るのかもしれません。大きすぎると効率が悪くなるのかもしれません。勉強中です。

その下のエンコーダEncのパラメータを設定します。「エンコードカウント方向の反転」はFALSEからTRUEに変えました。
「スケーリング係数計算値」とその下の「スケーリング係数の分母」はデフォルトのままにしました。前回は、「スケーリング係数計算値」を0.001に変更して使いました。

ほかctrlはデフォルトのままにしました。前回の解説を参照してください。
回転させる
軸1をダブルクリックし、オンラインのタブを開きます。画面はグレイで、有効になっていません。

メニューの「構成の有効化」アイコンをクリックします。途中二つのパネルが出ますが、OKをクリックします。

オンラインになりました。

中央右にある有効化の設定ボタンを押し、三つとも有効にします。

F1からF4のボタンを押すと、モータが回転します。時に暴走してエラーが表示されます。レジュームできないので、構成の有効化を押すと、正常になることもあります。

以上で、モータが回るところまで確認できました。
簡単に暴走するときは、筆者のモータでは、「スケーリング係数計算値」を0.001に変更、「スケーリング係数の分母」を5や10にしたほうが、安定でした。
間違ってもF9は押さないでください。エラーで止まらないときは、F6を押せば止まりますが、原点からはるかに遠いところで止まってしまいます。
プログラムを作るときも、現在位置は0からあまり離れたところに設定しないでください。