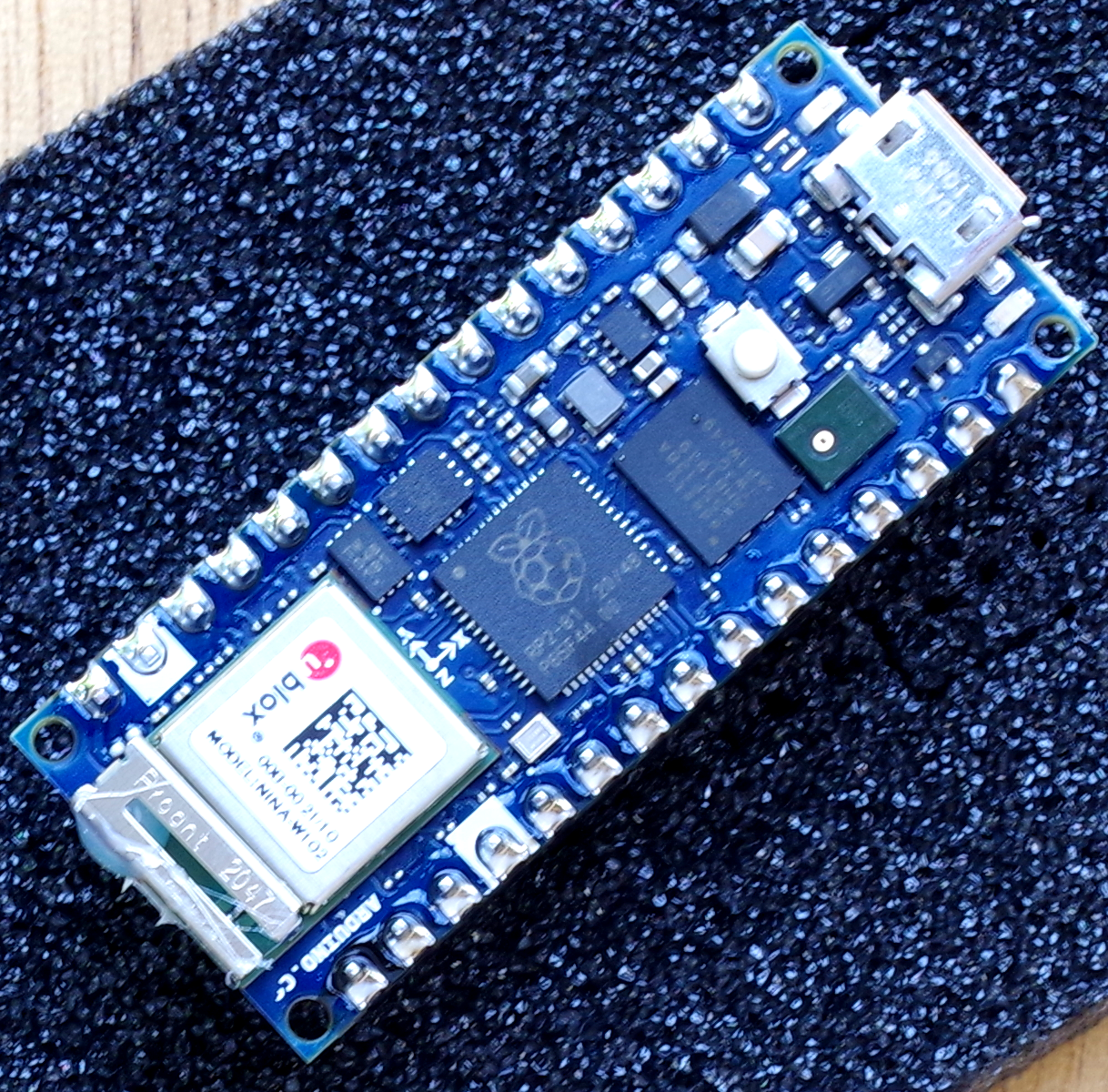
Arduino NANO RP2040 CONNECTはArduino.ccの製品で、Raspberry Pi PicoのCPUを積み、6軸加速度センサやマイクも載っています。技適の通ったNina W102 uBlox moduleを搭載しているので、Wi-Fi、BLEのプログラムが書けます。
ここでは、Nano 33 BLE Senseでマルチセンサ・ペリフェラルを作る (7) 9軸慣性センサ IMU LSM9DS1をベースに、6軸加速度センサの値をBLEで送信するスケッチを描きます。
開発環境
Arduino IDEは1.8.15、ボードマネージャで最新に、ライブラリも最新にしておきます。ちょっと前の1.8.13のままだと、コンパイル時にぼろぼろエラーが出ました。
最初に、IMUのLSM6DSOXTR (6軸)のドライバを入れます。

同時にサンプル例が入ります。SimpleAccelerometerを読み込み、実行できることを確かめます。
スケッチ
Notifyに対応したスケッチのつもりですが、ArduinoBLEライブラリでNotifyはうまく動いていないような気がするので、read属性しかつけていません。
UUIDは、ユニークなUUIDを発行してくれるところのを使っています。
# include <ArduinoBLE.h>
# define LSM6DSOX_SERVICE_UUID "F000AA30-0451-4000-B000-000000000000"
// BLE Service
BLEService Sensor_LSM6DSOX_Service(LSM6DSOX_SERVICE_UUID);
# define LSM6DSOX_Acceleration_Characteristic_UUID "F000AA31-0451-4000-B000-000000000000"
# define LSM6DSOX_Gyroscope_Characteristic_UUID "F000AA32-0451-4000-B000-000000000000"
// BLE Characteristic
BLEStringCharacteristic LSM6DSOX_Acceleration(LSM6DSOX_Acceleration_Characteristic_UUID, BLERead, 24);
BLEStringCharacteristic LSM6DSOX_Gyroscope(LSM6DSOX_Gyroscope_Characteristic_UUID, BLERead, 24);
# include <Arduino_LSM6DSOX.h>
float AccelerationX = 0, AccelerationY = 0, AccelerationZ = 0;
float GyroscopeX = 0, GyroscopeY = 0, GyroscopeZ = 0;
void readLSM6DSOX() {
if (IMU.accelerationAvailable()) {
IMU.readAcceleration(AccelerationX, AccelerationY, AccelerationZ);
}
if (IMU.gyroscopeAvailable()) {
IMU.readGyroscope(GyroscopeX, GyroscopeY, GyroscopeZ);
}
}
# define localNAME "RP2060_LSM6DSOX"
# define DeviceNAME "RP2060BLE"
float oldValue = 0; // last value
float previousMillis = 0; // last time value was checked, in ms
void setup() {
Serial.begin(9600); // initialize serial communication
while (!Serial);
// begin initialization
if (!BLE.begin()) {
Serial.println("starting BLE failed!");
while (1);
}
if (!IMU.begin()) { // LSM6DSOX
Serial.println("Failed to initialize IMU!");
while (1);
}
BLE.setLocalName(localNAME);
BLE.setDeviceName(DeviceNAME);
// add the service UUID
BLE.setAdvertisedService(Sensor_LSM6DSOX_Service);
// add characteristic
Sensor_LSM6DSOX_Service.addCharacteristic(LSM6DSOX_Acceleration);
Sensor_LSM6DSOX_Service.addCharacteristic(LSM6DSOX_Gyroscope);
// Add service
BLE.addService(Sensor_LSM6DSOX_Service);
// set initial value for this characteristic
LSM6DSOX_Acceleration.writeValue(String(oldValue));
LSM6DSOX_Gyroscope.writeValue(String(oldValue));
// start advertising
BLE.advertise();
Serial.println("Bluetooth device active, waiting for connections...");
}
void loop() {
// wait for a BLE central
BLEDevice central = BLE.central();
// if a central is connected to the peripheral:
if (central) {
delay(100);
Serial.print("Connected to central: ");
// print the central's BT address:
Serial.println(central.address());
// check the battery level every 200ms
// while the central is connected:
while (central.connected()) {
long currentMillis = millis();
// if 200ms have passed, check value:
if (currentMillis - previousMillis >= 200) {
previousMillis = currentMillis;
updateValue();
delay(1000);
}
}
// when the central disconnects
Serial.print("Disconnected from central: ");
Serial.println(central.address());
}
}
void updateValue() {
readLSM6DSOX();
String valueof_LSM6DSOX_Acceleration = String(AccelerationX) + "," + String(AccelerationY) + "," + String(AccelerationZ);
String valueof_LSM6DSOX_Gyroscope = String(GyroscopeX) + "," + String(GyroscopeY) + "," + String(GyroscopeZ);
// if value has changed
if (( AccelerationX + GyroscopeX) != oldValue) {
Serial.print("---\nLSM6DSOX_Acceleration % is now: ");
Serial.println(String(AccelerationX) + "," + String(AccelerationY) + "," + String(AccelerationZ));
Serial.print("LSM6DSOX_Gyroscope % is now: ");
Serial.println(String(GyroscopeX) + "," + String(GyroscopeY) + "," + String(GyroscopeZ));
// update characteristic
LSM6DSOX_Acceleration.writeValue(valueof_LSM6DSOX_Acceleration);
LSM6DSOX_Gyroscope.writeValue(valueof_LSM6DSOX_Gyroscope);
oldValue = AccelerationX + GyroscopeX; // save the level for next comparison
}
}
動作を確認
Windows10で動いているオンセミのRSL10 Bluetooth Low Enaergy Exploerを使って接続します。
センサの値はテキストで送っています。
上の表示データはArduino IDEのシリアルモニタで、送信しているデータを表示しています。下が、セントラルの立場で接続しているオンセミのツールです。送っているデータと、受信しているデータが同じであることが確認できました。
