- 1回目: とりあえずサンプルを動かす
- 2回目: 通信方法やメモリマップについて
- 3回目: How to Debug Linux Application<--- 今回の内容
- 4回目: How to Debug Baremetal Firmware
本記事について
Linux + ベアメタル(or FreeRTOS)のマルチ環境を、OpenAMPを使用してZYBOで実現させました。
- CPU0: Linux
- CPU1: ベアメタル (or FreeRTOS)
1回目では、動作確認用Linuxアプリケーションとして、自動でインストールされたecho_testを使用しました。今回は、LinuxアプリケーションをXilinx SDKで開発(実装、デバッグ)します。
環境
- 開発用PC: Windows 10 64-bit
- Vivado 2017.4 WebPACKライセンス
- Xilinx SDK 2017.4
- 開発用PC (Linux): Ubuntu 16.04 本家 (日本語版じゃない) (on VirtualBox 5.2.4)
- PetaLinux 2017.4
- ターゲットボード: ZYBO (Z7-20)
プロジェクトの作成
Linux System Rootの準備
今回の場合は、これはやらなくても大丈夫かもしれません。また、この手順自体はOpenAmpに限らず、通常のLinuxアプリケーション開発でも同じです。
PetaLinuxでオリジナルのLinuxイメージを作成して、標準ではないライブラリをインストールしたとします。XSDK(on Windows)にも、最低限のものはインストールされていますが、無い場合があります。この場合、ヘッダやライブラリが必要になります。そのため、PetaLinuxからSystem Rootをコピーする必要があります。
まず、Linuxイメージを作成したPetaLinuxプロジェクトのディレクトリ内で、下記コマンドでSystem Rootをアーカイブ化します。ポイントは、シンボリックリンクを実体化することです。シンボリックリンクのままだと、Windowsにコピーしたときに使えなくなってしまいます。
zip -r plnx_arm.zip build/tmp/sysroots/plnx_arm
これを、Windowsの適当な場所に解凍します。(例: C:\asd\dev\zynq\vivado\project_openamp\project_openamp.sdk\sysroots\plnx_arm)
XSDKプロジェクトの作成
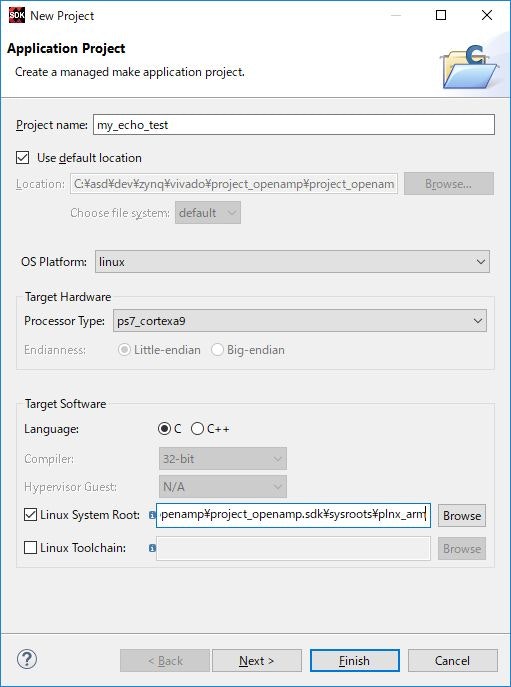
XSDKを起動して、メニューバー -> File -> New -> Application Projectを開きます。
下記設定で、my_echo_testというプロジェクトを作成します。重要な点は、Linux System Rootの設定です。
XSDKプロジェクトの設定
Project Explorer -> 作成したプロジェクト(my_echo_test) -> 右クリック -> Properties -> C/C++ Build -> Settings -> ARM v7 Linux gcc linker -> Miscellaneous、を選びます。
Linker Flagsに下記値を設定します。パスは適当に置き換えてください。
--sysroot=C:\asd\dev\zynq\vivado\project_openamp\project_openamp.sdk\sysroots\plnx_arm
場合によっては、ライブラリしていが必要になるかもしれません。(今回は不要です。)
Project Explorer -> 作成したプロジェクト(my_echo_test) -> 右クリック -> Properties -> C/C++ Build -> Settings -> ARM v7 Linux gcc linker -> Libraries、を選びます。Librariesの所に、metalを追加。
ソースコードを書く
面倒なので、echo_testと同じコードを持ってきます。下記ソースコードをコピペします。
https://github.com/Xilinx/meta-openamp/blob/rel-v2017.4/recipes-openamp/rpmsg-examples/rpmsg-echo-test/echo_test.c
ビルドが成功したら、my_echo_test.elfが作られているはずです。
デバッグする
OpenAMP環境を用意する
my_echo_testは、エコーバックするベアメタル(BM)ファームウェアと協調して動作します。そのため、1回目と同様に、BM側ファームウェアをロードして、OpenAMPを開始する必要があります。
下記コマンドで、エコーバックするデモファームウェアを開始します。
modprobe rpmsg_user_dev_driver
echo image_echo_test > /sys/class/remoteproc/remoteproc0/firmware
echo start > /sys/class/remoteproc/remoteproc0/state
デバッグする
デバッグ方法は、通常のLinuxアプリのデバッグと同じです。(https://qiita.com/take-iwiw/items/8134ca7098622219b177 )
まず、ZYBOのUARTターミナル上で、ifconfigなどでIPアドレスを確認しておいてください。(192.168.1.87とします)
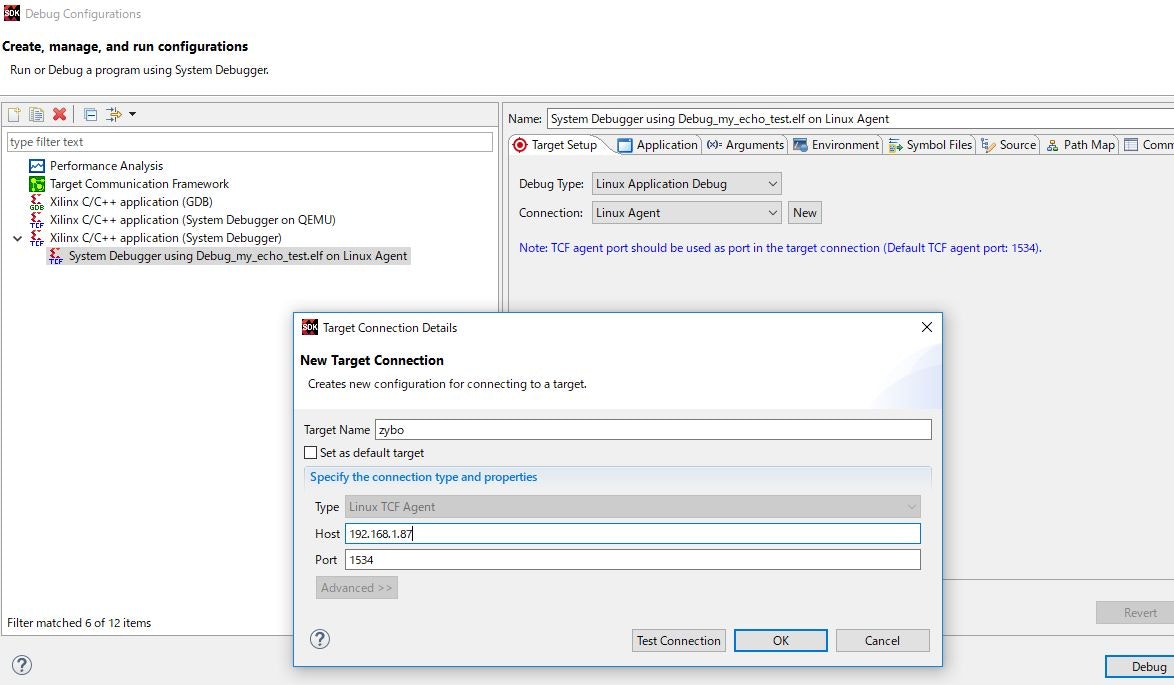
- XSDK上で、my_echo_test.elfで右クリック -> Debug As -> Debug Configurations、を開きます
-
Xilinx C/C++ applications (system Debugger)の下になにもなければ、ダブルクリックします - Target Setupタブで、Connection横のNewをクリック
- Hostに192.168.1.87を設定します
- Applicationタブで、my_echo_test.elfが選択されていることを確認します
- Apply、Debugをクリックします。
- 2回目以降は、直接Debugボタンで実行できます
うまく動けば、main関数先頭で止まります。
その後、Resumeすると、プログラムが動き出します。
好きなところで止めたり、変数を確認したりできるはずです。
再実行するとき
前回も記載しましたが、再度実行するときには、一度OpenAMPを終了する必要があります。
echo stop > /sys/class/remoteproc/remoteproc0/state
echo start > /sys/class/remoteproc/remoteproc0/state
(おまけ) Pythonの場合
Pythonからは下記のようなコードで通信できる。
注意点は、open("/dev/rpmsg0", "r+")で開くとうまく通信出来なかった。os.open("/dev/rpmsg0", os.O_RDWR)だと出来た。
def main():
while(not (os.path.exists("/dev/rpmsg0"))):
sleep(1)
rpmsg = os.open("/dev/rpmsg0", os.O_RDWR)
os.write(rpmsg, "ABC")
readValue = os.read(rpmsg, 20)
print("readValue = " + readValue)
os.close(rpmsg)
if __name__ == '__main__':
main()