1.Linux Mintのバージョンの確認
・Terminalを開き以下のコマンドを実行
$ cat /etc/issue
すると、Linux Mint 19.1を使用している場合は
Linux Mint 19.1 Tessa \n \l
このような結果が得られる。
2.ROSのインストール
ROS Melodicインストールサイトへ行くと、
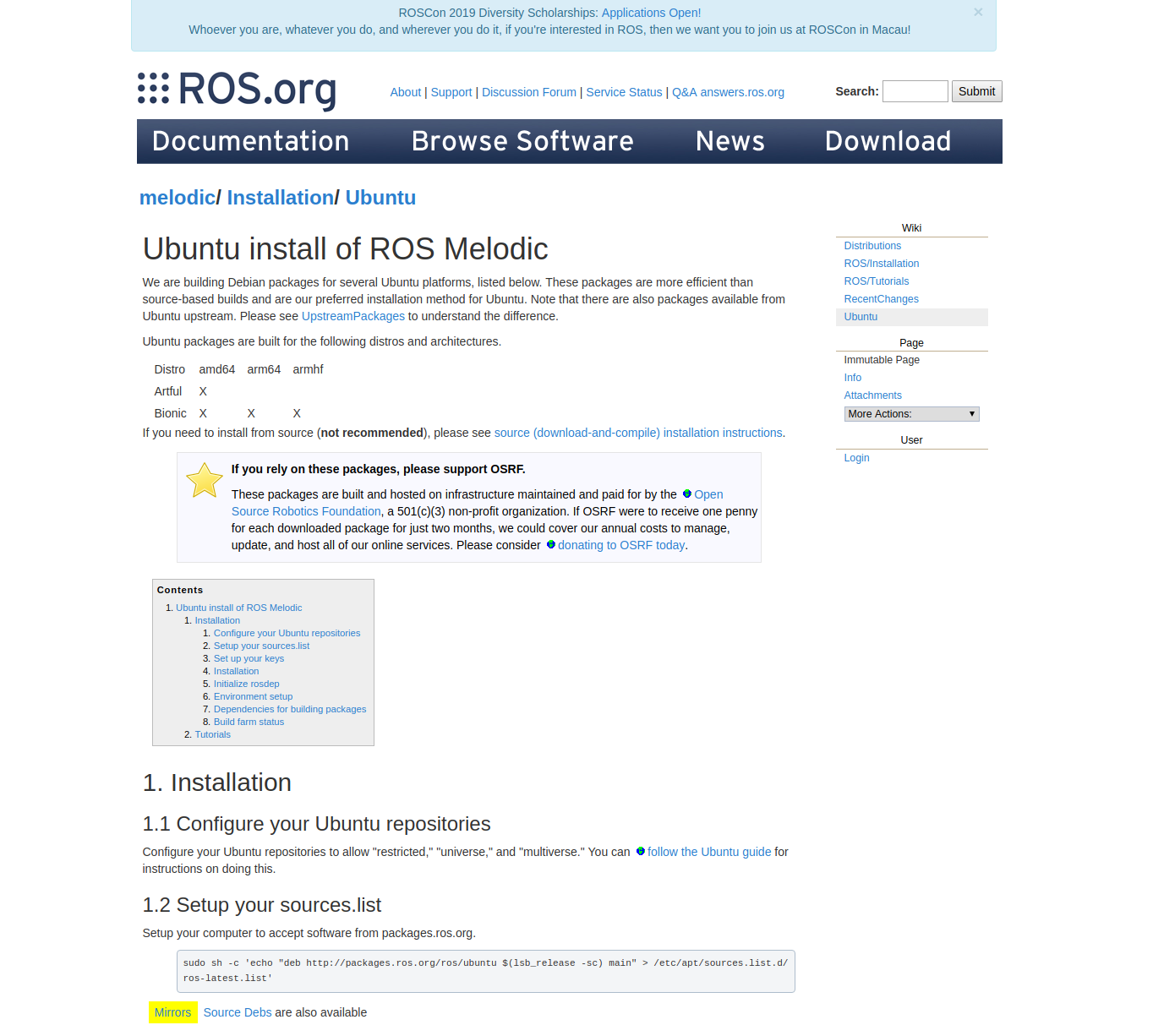
このようなページが表示される。
1.1 Configure your Ubuntu repositories
基本的にこのステップはデフォルトの設定で満たされているはずなので、飛ばして大丈夫。
1.2 Setup your sources.list
このステップではPCがpackage.ros.orgからのソフトウェアを受け付けるように、sources.listを編集する。
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
Linux Mintではなく、Ubuntuをつかっている場合はこのまま次のステップへ進むことができるが、Linux Mintの場合は/etc/apt/sources.list.d/ros-latest.list へ書き込まれた情報の一部を訂正する必要がある。
- 好きなテキストエディタで /etc/apt/sources.list.d/ros-latest.listをひらく
(例)
$ sudo emacs /etc/apt/sources.list.d/ros-latest.list
- そうすると、
deb http://packages.ros.org/ros/ubuntu tessa main
という文が現れる。ここで、ubuntu Tessaとなっているが、TessaはUbuntuのバージョン名ではなくLinux Mintのバージョン名なので、以下の写真
を参考にTessaからBionicに変更する。

*画像にある以前のバージョンを使用している場合はここを参照。
3.このように変更が完了したら保存する。
deb http://packages.ros.org/ros/ubuntu bionic main
1.3 Set up your keys
以下のコマンドをコピーして、Terminalへ貼り付け、実行する。
$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
1.4 Installation
1.まず、Debian package indexを最新状態にする。
$ sudo apt update
2.ROSのインストール
ROSにはたくさんのライブラリやツールが含まれており、必要に応じてインストールするものを選ぶことができる。
・Desktop-full install
これはROS,rqt,rviz,robot-genetic libraries,2D/3D simulatorsと2D/3D perceptionというROSをGUI環境で使う上で基本的なソフトウェアをインストールしてくれる。
sudo apt install ros-melodic-desktop-full
・Desktop install
これはROS,rqt,rviz,robot-genetic librariesを含むソフトウェアをインストールしてくれる。
sudo apt install ros-melodic-desktop
・ROS-Base install
これはROS package, buildそしてcommunication librariesインストールしてくれる。GUIツールは含まれない。
sudo apt install ros-melodic-ros-base
・Individual package install
ROSの特定のパッケージをインストールしたい場合は、
sudo apt install ros-melodic-PACKAGENAME
ros-melodic- + パッケージ名でインストールすることができる。
3. まとめ
以上でROSのインストールはおわりです。
重要な点としてはインストール手順1.2で/etc/apt/sources.list.d/ros-latest.listの内容を書き換えたところです。ここさえできれば、インストールは問題なくできると思います。
また、基本的に他バージョンのROS(kineticとか)も同じ手順でインストールすることができます。