はじめに
Dockerがインストールされているものとして、
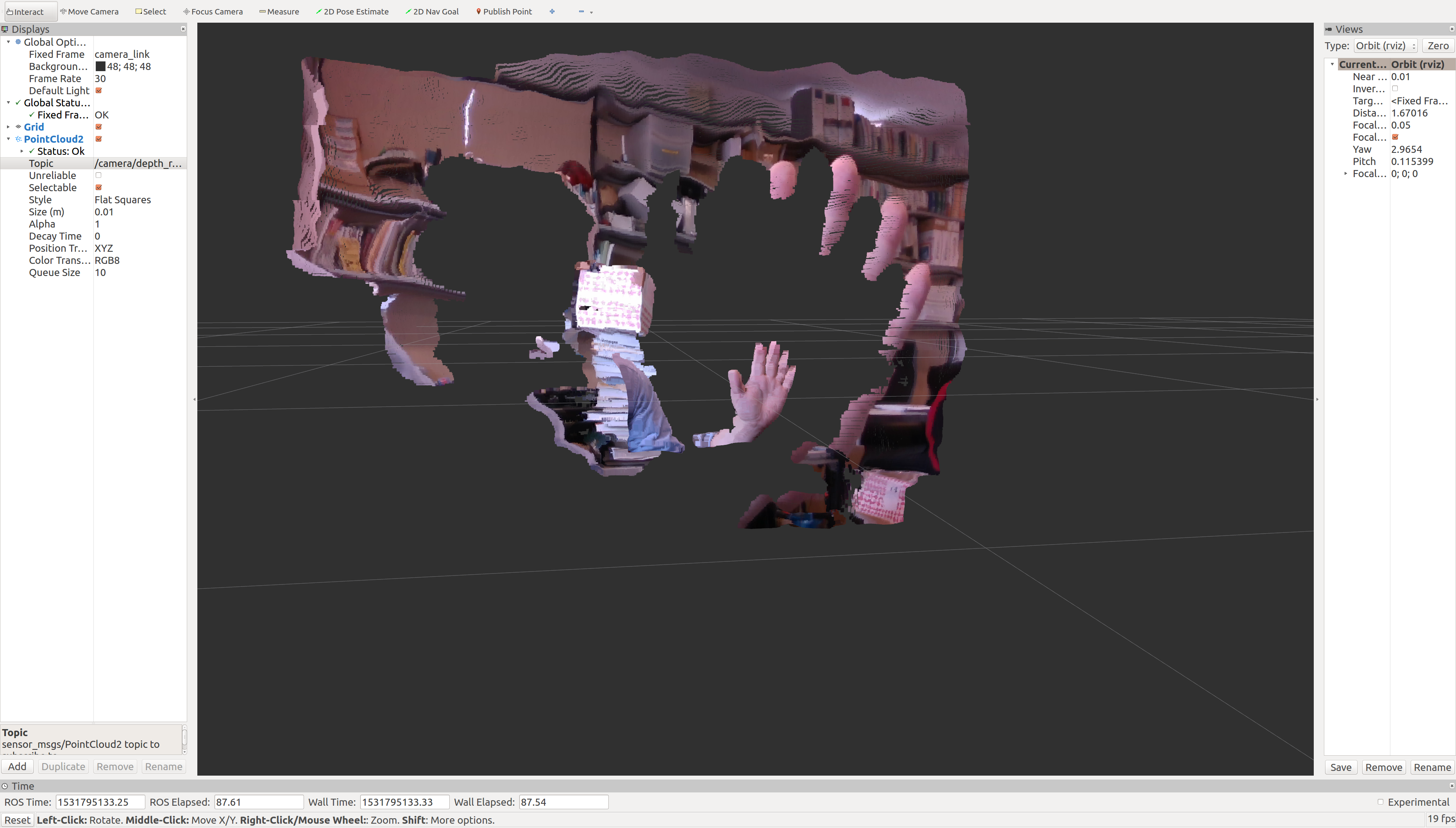
RGBDカメラであるIntel Realsense D415/D435をROSで使用する環境を5分で構築する。
Dockerをインストールしていない方は、こちらを参考にDockerをインストールする。
インストール
基本的にはhttps://github.com/IntelRealSense/librealsenseのinstall手順に従ってインストールする。
https://github.com/IntelRealSense/librealsense/blob/master/doc/installation.md
https://github.com/IntelRealSense/librealsense/blob/master/doc/installation.md#prerequisites
prerequisites
sudo apt install git libssl-dev libusb-1.0-0-dev pkg-config libgtk-3-dev
/tmpなどにgit cloneしてくる。
cd /tmp
git clone https://github.com/IntelRealSense/librealsense
cd librealsense
続いてUbuntuのversion特有のインストール作業を行う。
- Ubuntu 14 or when running of Ubuntu 16.04 live-disk:
sudo apt-get install
./scripts/install_glfw3.sh
- Ubuntu 16:
sudo apt install libglfw3-dev
- Ubuntu 18:
sudo apt install libglfw3-dev libgl1-mesa-dev libglu1-mesa-dev
udevにデバイス情報を記述する
sudo cp config/99-realsense-libusb.rules /etc/udev/rules.d/
sudo udevadm control --reload-rules && udevadm trigger
kernelが低い場合の対処
librealsenseではkernelのversionが低いと動作しないようなので、kernelを上げるかpatchを上げる必要がある。
実際のロボットなどでは様々な理由があってすぐにはkernelを上げることができないという問題がある。
そこで、ここではkernelのversionを上げずにpatchを当てる方法を説明する。
基本的には下記のコマンドを実行してmodprobeすると見えるようになる。
./scripts/patch-uvcvideo-ubuntu-mainline.sh
sudo modprobe uvcvideo
D415/D435のDocker image
https://hub.docker.com/r/iory/docker-ros-d415/
にあるdockerイメージをpullする。
sudo docker pull iory/docker-ros-d415:docker.d415
実行
D415/D435をUSB3.0のポートに挿して、
以下のコマンドを実行すると、PointcloudなどのtopicがROSで見えるようになる。
sudo docker run --rm --net=host --privileged --volume=/dev:/dev -it iory/docker-ros-d415:docker.d415 /bin/bash -i -c 'roslaunch realsense2_camera rs_rgbd.launch enable_pointcloud:=true align_depth:=false depth_registered_processing:=true align_depth:=true'