前回の続き, 今回はSobel, Laplacian, Canny法を用いたエッジ検出を行う.
今回は, 用意するものなどは割愛する.
ソースコード
Main.cpp
# include<opencv2/opencv.hpp>
int main()
{
//グレースケールで画像を読み込む
cv::Mat img = cv::imread("sample.jpg", 0);
cv::Mat img_c, img_l, img_s_x, img_s_y, img_s;
//Canny法を用いてエッジ検出
//閾値は0 ~ 255で任意で決める
//第1引数が入力, 第2引数が出力
cv::Canny(img, img_c, 125, 255);
//Laplacianでエッジ検出
//第3引数は検出範囲
cv::Laplacian(img, img_l, 3);
cv::convertScaleAbs(img_l, img_l, 1, 0);
//2値化
cv::threshold(img_l, img_l, 0, 255, cv::THRESH_BINARY|cv::THRESH_OTSU);
//Sobelでエッジ検出
//x, y方向の微分
cv::Sobel(img, img_s_x, CV_8UC1, 1, 0, 3);
cv::Sobel(img, img_s_y, CV_8UC1, 0, 1, 3);
//x, y方向に微分をした画像を合成
img_s = abs(img_s_x) + abs(img_s_y);
cv::convertScaleAbs(img_s, img_s, 1, 0);
//2値化
cv::threshold(img_s, img_s, 0, 255, cv::THRESH_BINARY|cv::THRESH_OTSU);
//画像の保存と出力
cv::imwrite("canny.jpg", img_c);
cv::imwrite("laplace.jpg", img_l);
cv::imwrite("sobel.jpg", img_s);
cv::imshow("Canny", img_c);
cv::imshow("Laplace", img_l);
cv::imshow("Sobel", img_s);
cv::waitKey(0);
return 0;
}
入力画像

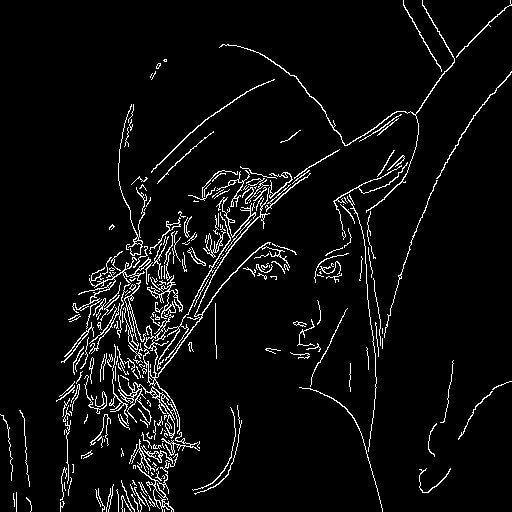
出力画像
Canny法
Laplacian
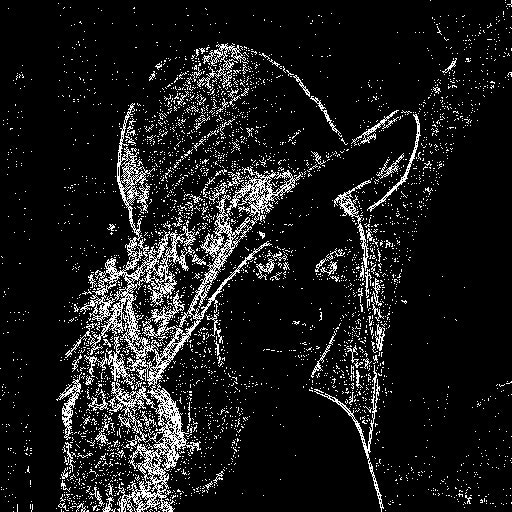
Sobel
