MCP3008でのハードウェアSPIとソフトウェアSPIの処理時間
A/DコンバータであるMCP3008を用いたハードウェアSPIとソフトウェアSPIの処理時間に差があることに気がついたので、ここに記録する。
ハードウェアSPIとソフトウェアSPI
こちらに説明あり。ハードウェアSPIは専用回路を用い、ソフトウェアSPIはGPIOを用いる。
環境
ロジックアナライザを試すその3(SPI)と同じ。ArduinoでA/DコンバータMCP3008と温度センサーMCP9700とを利用。
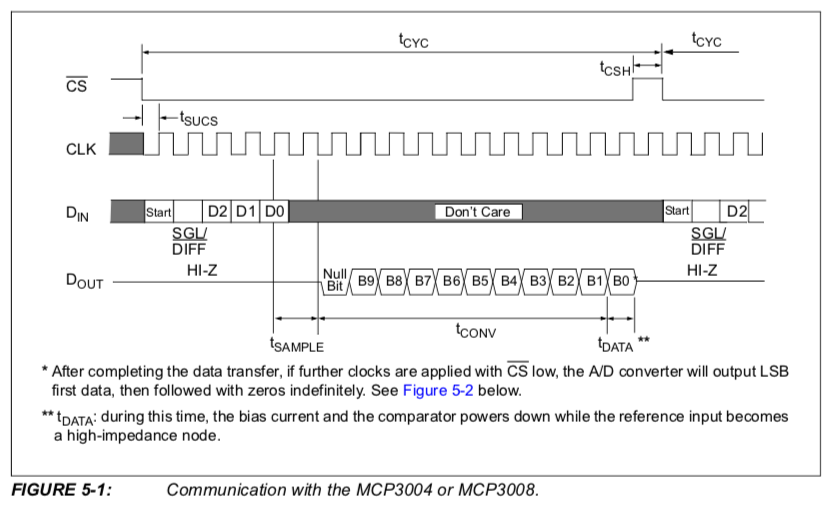
MCP3008データシート
ハードウェアSPI処理
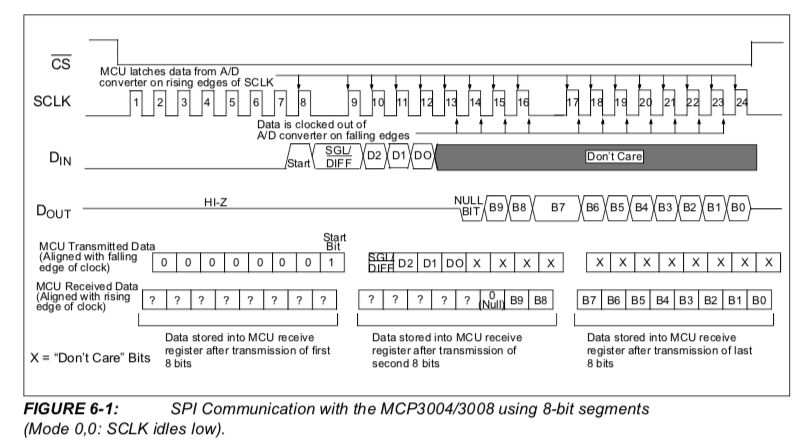
ハードウェアSPIでは8ビットをまとめて処理する、‘leading zeros’がきっかけとなっているらしい。これをもとにコーディングする(前回のソースコード参照)
ソフトウェアSPI処理
シリアルに1ビットずつ処理する。
ソースコード
ハードウェアSPI
前回と全く同じ。
# include <SPI.h>
# define SPI_CS 10
float Vref = 5.0 ;
SPISettings settings(1000000,MSBFIRST,SPI_MODE0);
void setup() {
Serial.begin(9600);
pinMode(SPI_CS, OUTPUT);
SPI.begin();
}
void loop(){
// SPI setting and write&read
SPI.beginTransaction(settings);
digitalWrite(SPI_CS, LOW);
SPI.transfer(0b00000001); // Start bit 1
byte highByte = SPI.transfer(0b10000000); // SingleEnd Channel 0
byte lowByte = SPI.transfer(0x00); // dummy
digitalWrite(SPI_CS, HIGH);
SPI.endTransaction();
unsigned int dataCh0 = ((highByte & 0x03) << 8) + lowByte;
// Conversion of read data according to MCP9700 spec
float volts = dataCh0 * Vref / 1024;
float temperature = (volts - 0.5) / 0.01; // : 500 mv at 0 degree and 10 mv / degree
Serial.println("dataCh0: " + String(dataCh0,HEX) + " Voltage: " + String(volts,3));
Serial.println("Temperature: " + String(temperature,2) + " degrees");
Serial.println();
delay(3000);
}
ソフトウェアSPI
こちらにあるものとほぼ同じ。
# include <SPI.h>
# define SPI_CS 7
# define SPI_MOSI 6
# define SPI_MISO 5
# define SPI_CLK 4
float Vref = 5.0;
void setup() {
Serial.begin(9600);
pinMode(SPI_CS, OUTPUT);
pinMode(SPI_CLK, OUTPUT);
pinMode(SPI_MOSI, OUTPUT);
pinMode(SPI_MISO, INPUT);
digitalWrite(SPI_CLK, LOW);
digitalWrite(SPI_MOSI, LOW);
digitalWrite(SPI_CS, HIGH);
}
void loop() {
// SPI setting and write&read
unsigned int outBuffer, inBuffer = 0;
byte command = ((0x01 << 7) | // Start bit
(1 << 6) | // 1: SingleEnd
((0 & 0x07) << 3)); // Channel 0
digitalWrite(SPI_CS, LOW);
outBuffer = command << 8;
for (int c = 0; c < 16; c++) {
digitalWrite(SPI_MOSI, (outBuffer >> (15 - c)) & 0x01);
digitalWrite(SPI_CLK, HIGH);
digitalWrite(SPI_CLK, LOW);
inBuffer <<= 1;
if (digitalRead(SPI_MISO))
inBuffer |= 0x01;
}
digitalWrite(SPI_CS, HIGH);
unsigned int dataCh0 = inBuffer & 0x3ff;
// Conversion of read data according to MCP9700 spec
float volts = dataCh0 * Vref / 1024;
float temperature = (volts - 0.5) / 0.01; // : 500 mv at 0 degree and 10 mv / degree
Serial.println("dataCh0: " + String(dataCh0,HEX) + " Voltage: " + String(volts,3));
Serial.println("Temperature: " + String(temperature,2) + " degrees");
Serial.println();
delay(3000);
}
ロジックアナライザ
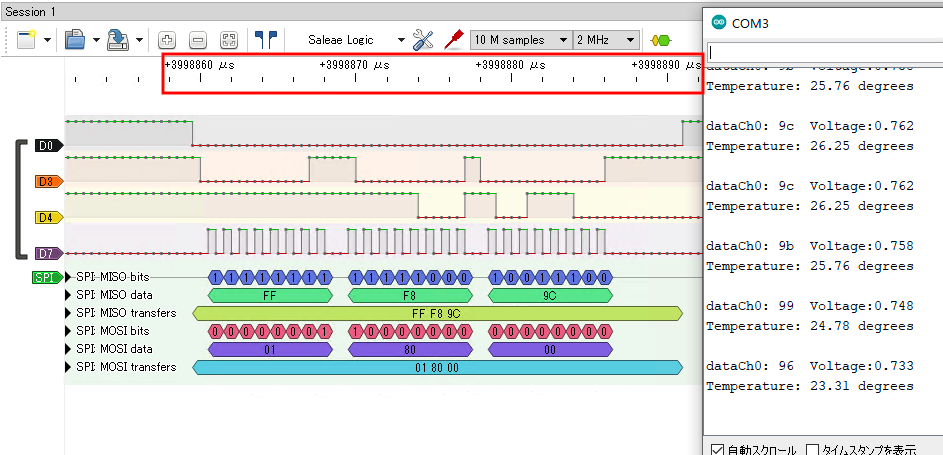
ハードウェアSPI
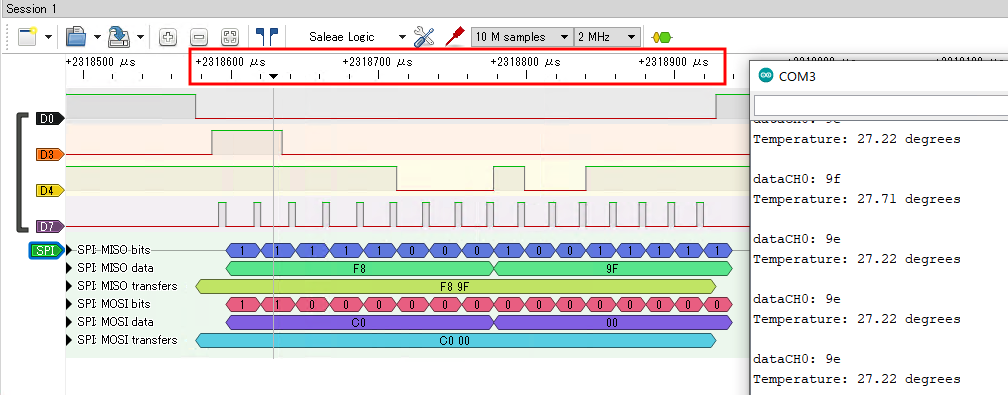
ソフトウェアSPI
所持するロジックアナライザのSPIデコードはハードウェアSPIを前提にしているようで、そのままではデコードできず。試しに、Clock polarityとClock phaseを適当に選ぶとデコードしてくれた。
比較
どちらもMISOにらしいデータ('9c'および'9f'、変換後は26−27度)が見られる。ここでのポイントは処理速度。ロジックアナライザでの取得データの処理時間(赤枠)を見ると、
- ハードウェアSPI 26μs
- ソフトウェアSPI 340μs
となっている。これだけ差があるのは少々びっくり。
ソフトウェアSPIについては用いるマイコンなどの能力にも依存するのであろう。また、他のSPI対応デバイスでどんな結果となるかは不明。