やりたい事
- vue.js側のボタンでaws iotにpublishしたい
- arduinoでaws iotにsubscribeして取得したデータに応じてサーボを動かしたい
- サーボが回ると餌が投入される仕組み
書いてみると単純。
使うアイテム
- サーボモータ MG92B http://akizukidenshi.com/catalog/g/gM-13228/
5vでもギリギリ動く。家にあったやつをリサイクルです - ESPDuino ここでも使ったセンサーデータ送ってるやつです
- 割りばし
- アルミホイル
- グルーガン
- 安全ピン
- 紐
おおよそこんな感じです。電子工作っぽくないアイテムがいっぱい出てきました。(まあ、タイトルでネタバレしてるんですけども。)
aws iotにpublish
単純にLambdaでやることにしました。
すでに組み込んでいるLambdaがあるのでその方が楽です。
iot = boto3.client('iot-data')
@app.route('/mqtt/{angle}', methods=['GET'], authorizer=authorizer, cors=True)
def publish_mqtt_servo(angle):
logger.debug('/mqtt/{angle}')
logger.debug(angle)
headers = {"Content-Type" : "application/json", "Access-Control-Allow-Origin": "*", "X-Content-Type-Options": "nosniff"}
try:
iot.publish(
topic=iot_topic,
qos=1,
payload="%s" % (angle)
)
resp = {"statusCode" : 200,
"body" : "ok",
"headers" : headers
}
return resp
except:
logger.debug(traceback.print_exc())
resp = {"statusCode" : -1,
"body" : "error",
"headers" : headers}
return resp
だいたいこんだけ。これでchalise deployするとapi gatewayにリソースが追加される。
publishするメッセージはシンプルに数値だけです。
ちなみにpython3.6だとopensslのversionがどうたらっていわれたのでpython3.7にしています。
あとlambdaの実行ロールに"iot:Connect"と"iot:Publish"を追加しました。
vue.js
Lambdaを叩くボタンを作ります。
ボタン
<section class="section" v-show="url">
<div class="container">
<b-collapse :open="false">
<button class="button is-primary" slot="trigger">Servo Controll</button>
<div class="notification">
<button class="button is-warning" @click="publishservo(1000)">
<i class="fas fa-stop"></i>
<span>Stop</span>
</button>
<button class="button is-info" @click="publishservo(1750)">
<i class="fas fa-play"></i>
<span>Shoot</span>
</button>
</div>
</b-collapse>
</div>
</section>
メソッド
methods:{
publishservo: function(angle) {
self = this;
console.log(angle)
Auth.currentSession()
.then(session => session.idToken.jwtToken)
.then(token => API.get('RaspiStream', '/mqtt/' + angle.toString(),
{
"headers":{"Authorization":token, "Content-Type": 'application/json'}
}
))
.then(function(response){ self.dialogAlert('publish success!')})
.catch(err => function(err){this.error = err});
},
dialogAlert: function(mess){
this.$dialog.alert(mess);
}
}
kinesis videoのURLを取る時にlambda叩いたとのほぼ同じ内容です。
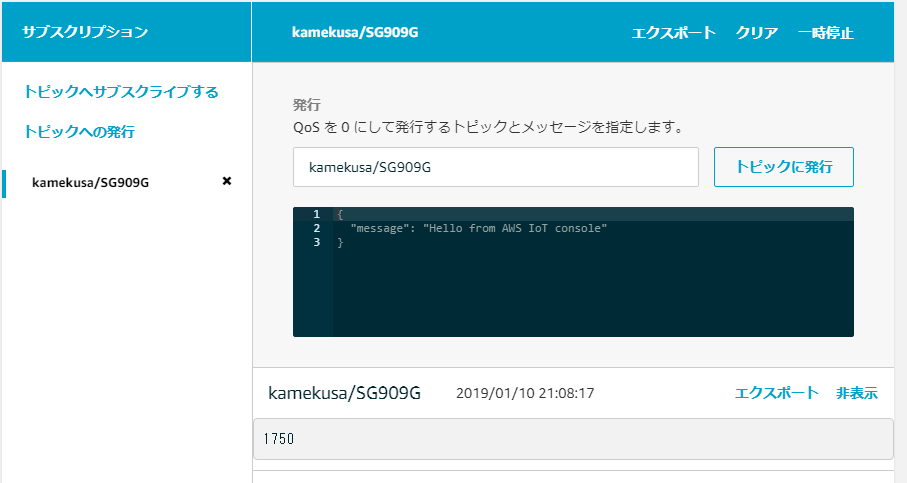
飛びました。渡してる値はサーボのwriteMicrosecondsに渡してる数値で、1000~1750くらいの値を渡してやると今回はちょうどよかった。
ESP8266側
aws iotに飛んだメッセージをキャッチ(subscribe)してサーボをぶん回します。
すでにソースの大半はこの回で入れ込んであるのであと少し。
サーボ動かす部分
# include <Servo.h>
# define SERVOPIN 2
Servo kameServo;
kameServo.attach(SERVOPIN);
void servo_move(int p){
Serial.print("angle: ");
Serial.println(p);
// set the servo position
kameServo.writeMicroseconds(p);
delay(1000);
}
subscribeの部分
void subscribe () {
int rc = client.subscribe(aws_topic_2, MQTT::QOS1, messageArrived);
if (rc != 0) {
Serial.print("rc from MQTT subscribe is ");
Serial.println(rc);
return;
}
Serial.println("MQTT subscribed");
}
で、subscribeのコールバックで走るmessageArrivedの中でservo_move(pos);してます。
工作の時間
1.今回の主役

丸めた新聞紙の周りにアルミをぐるぐる巻いて、半分に切ったやつ。(新聞紙は取り除いてある)
切り口はグルーガンで固めました。ちなみに針金はハンガー
2.主犯

適当な長さの割りばしをアームにしただけ。トリガー役です。
完成
くす玉システム #qiita用 pic.twitter.com/Ofct3PH3EV
— マスラオ (@masrao) 2019年1月13日
常設する予定はないのでモーターとかは仮止め。使うのは年に2,3回でしょうね。
なお、くす玉にしたのは食材の保存を考えての事もあります。
あとはシンプルで誤動作しにくいかなと。
いろいろ複雑な仕組みも考えはしたんですけどね。
さて、これで2泊3日くらいなら外出できそうだ。
https://github.com/ikegam1/dht22-to-arduino-to-awsiot
https://github.com/ikegam1/raspi-kvs-amplify-lambda-frontend
https://github.com/ikegam1/raspi-kvs-amplify-lambda-backend