修正
2018/10/29 19:34
カメラパラメータをプログラムで取得するように変更した。
2018/10/29 19:17
下記プログラム中のカメラに関するパラメータ設定を間違えていたので修正した。
誤:PinholeCameraIntrinsic(1280, 720, 640, 640, 640, 360)
正:PinholeCameraIntrinsic(1280, 720, 925, 925, 640, 360)
カラー画像

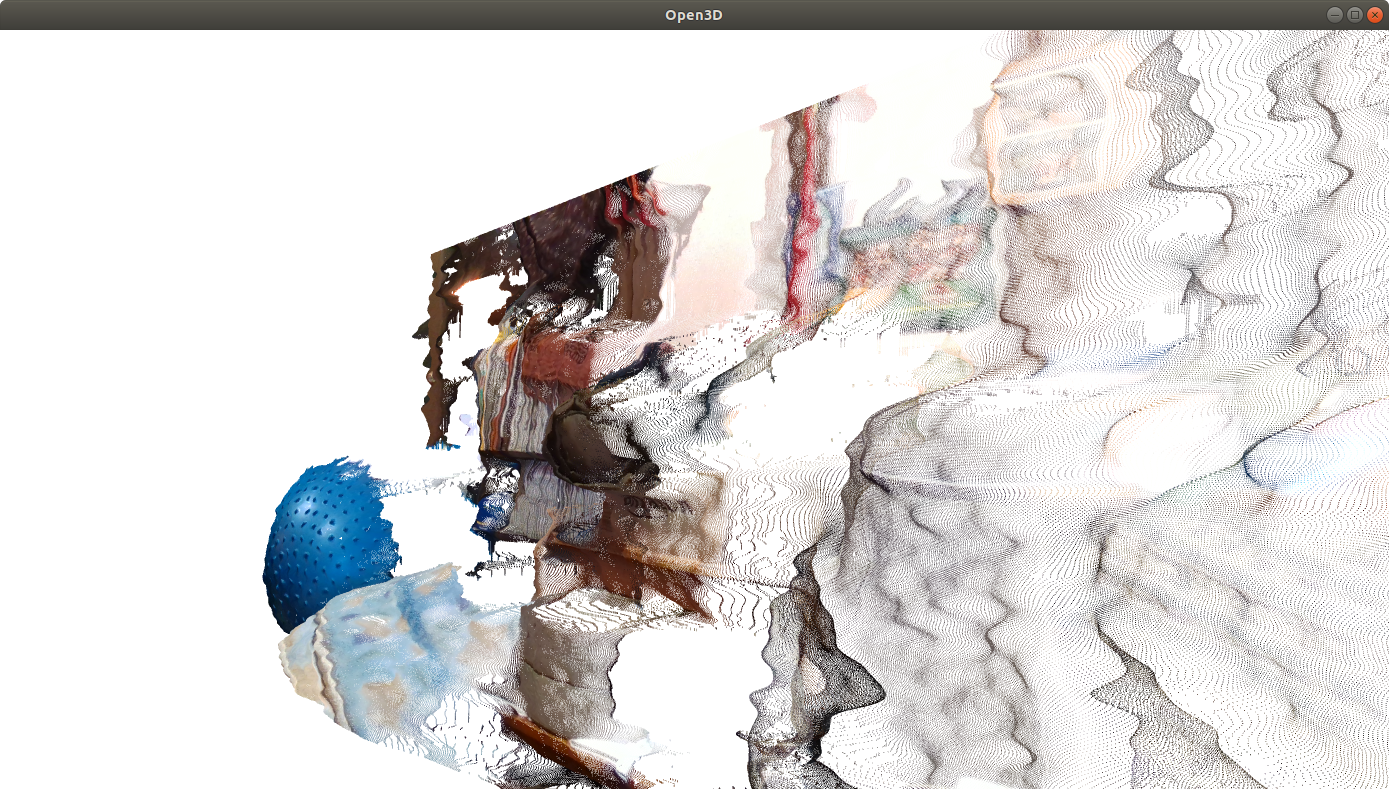
PointCloud表示1
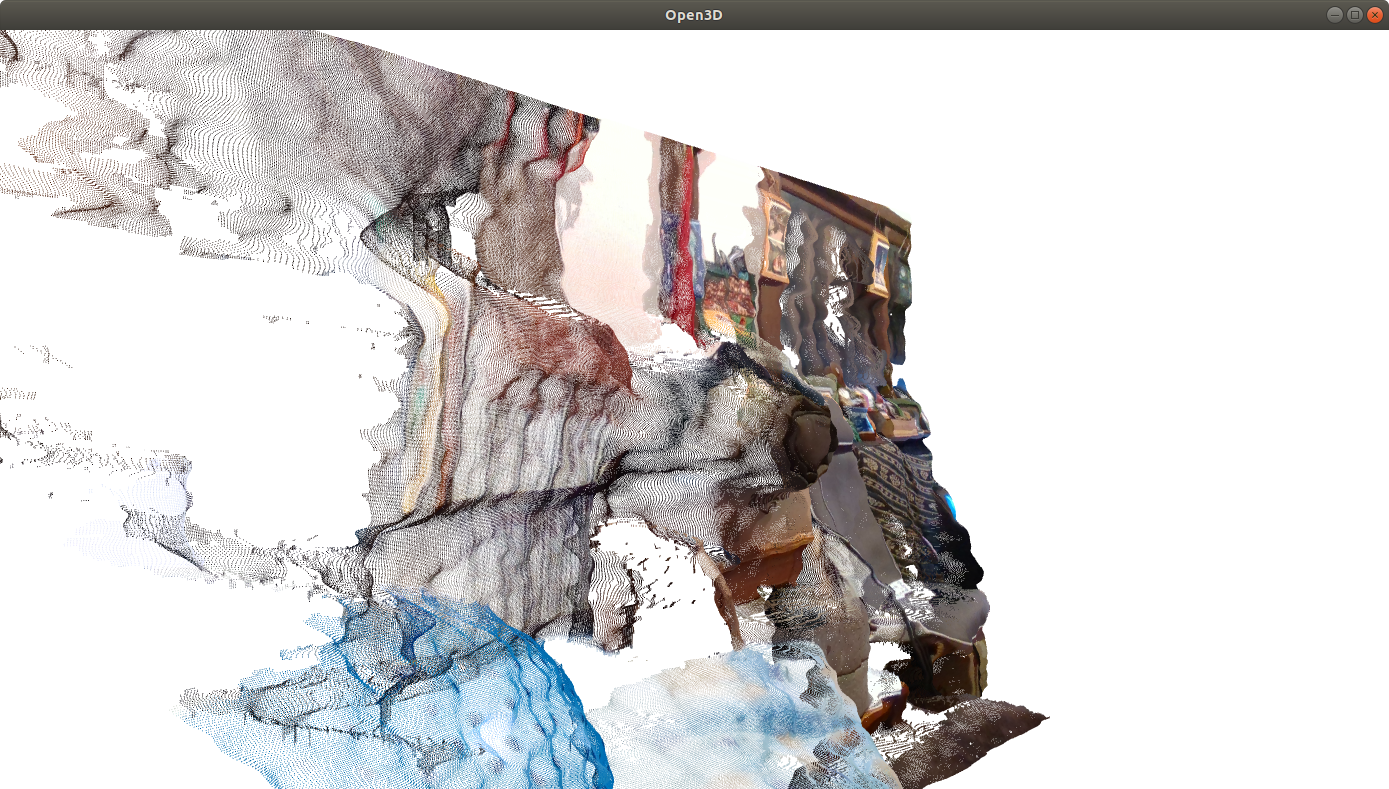
PointCloud表示2
Pythonソース
pc_capt_color.py
import pyrealsense2 as rs
import numpy as np
import cv2
from open3d import *
if __name__=="__main__":
align = rs.align(rs.stream.color)
config = rs.config()
config.enable_stream(rs.stream.depth, 1280, 720, rs.format.z16, 6)
config.enable_stream(rs.stream.color, 1280, 720, rs.format.rgb8, 6)
pipeline = rs.pipeline()
profile = pipeline.start(config)
# get camera intrinsics
intr = profile.get_stream(rs.stream.color).as_video_stream_profile().get_intrinsics()
print(intr.width, intr.height, intr.fx, intr.fy, intr.ppx, intr.ppy)
pinhole_camera_intrinsic = PinholeCameraIntrinsic(intr.width, intr.height, intr.fx, intr.fy, intr.ppx, intr.ppy)
while True:
frames = pipeline.wait_for_frames()
aligned_frames = align.process(frames)
color_frame = aligned_frames.get_color_frame()
color_image = np.asanyarray(color_frame.get_data())
cv2.namedWindow('color image', cv2.WINDOW_AUTOSIZE)
cv2.imshow('color image', cv2.cvtColor(color_image, cv2.COLOR_RGB2BGR))
if cv2.waitKey(1) != -1:
print('finish')
break
depth_frame = aligned_frames.get_depth_frame()
depth = Image(np.asanyarray(depth_frame.get_data()))
color = Image(color_image)
rgbd = create_rgbd_image_from_color_and_depth(color, depth, convert_rgb_to_intensity = False);
pcd = create_point_cloud_from_rgbd_image(rgbd, pinhole_camera_intrinsic)
pcd.transform([[1,0,0,0],[0,-1,0,0],[0,0,-1,0],[0,0,0,1]])
pipeline.stop()
write_point_cloud('./pc_color.pcd', pcd)
draw_geometries([pcd])
まずはD435からのカラー画像をOpenCVで表示し続ける。
何かキーを押すとその時点でのカラー画像と深度画像からPointCloudを作り、pc_color.pcdファイルとして保存してからOpen3Dを使って表示する。(マウスで拡大縮小や視線変更可能)
Open3Dウィンドウの終了ボタンを押すと終了。
実行
.sh
$ python pc_capt_color.py
保存されたpc_color.pcdをOpen3Dで表示
pc_disp_color.py
from open3d import *
if __name__=="__main__":
pcd = read_point_cloud('./pc_color.pcd')
draw_geometries([pcd])