はじめに
このページは,
の1ページです.
全体を見たい場合は上記ページへお戻りください.
概要
これまでの記事で
- dronekitでドローンを動かす
- MQTTでテキストを送信(Pub)・受信(Sub)する
が出来ましたので,
次は,この2つの要素技術を組み合わせてみます.
なお,今回も使うのはdronekit-sitl(シミュレータ)です.
準備するもの
今回もdronekit,dronekit-sitlおよびMQTTのために準備した
Ubuntu Linuxの入ったPCを利用します.
MQTTブローカーはPC自身(localhost)とします.
とりあえずPub/Subする
まずは,
・ドローンを動かす(SITL編)
・pythonでMQTT送受信
この2つの記事で使ったプログラムを1つにしてみます.
MQTTのPub側プログラムがドローンになり,
Sub側のプログラムが地上局,のようなイメージです.
Pub側プログラム
Pub側は新たにファイルを作ります.
以下をコピーするか,
あるいは ここ を右クリックして[名前を付けて保存]してください.
# !usr/bin/env python
# -*- coding: utf-8 -*-
print( "dronekitスタート" ) # 開始メッセージ
# 必要なライブラリをインポート
from kbhit import * # kbhitを使うために必要(同じフォルダにkbhit.pyを置くこと)
from subprocess import Popen # subprocessの中から、Popenをインポート
from signal import signal, SIGINT # Ctrl+C(SIGINT)の送出のために必要
from dronekit import connect # connectを使いたいのでインポート
from dronekit import VehicleMode # VehicleModeも使いたいのでインポート
from dronekit import LocationGlobal, LocationGlobalRelative # ウェイポイント移動に使いたいのでインポート
import time # ウェイト関数time.sleepを使うために必要
import paho.mqtt.client as mqtt # MQTTのライブラリをインポート
# ==MQTT関数の定義===========================================
# ブローカーに接続できたときの処理
def on_connect(client, userdata, flag, rc):
print("Connected with result code " + str(rc))
# ブローカーが切断したときの処理
def on_disconnect(client, userdata, flag, rc):
if rc != 0:
print("Unexpected disconnection.")
# publishが完了したときの処理
def on_publish(client, userdata, mid):
print("publish: {0}".format(mid))
# --ここからプログラムスタート----------------------------------
# kbhit()を使うための「おまじない」を最初に2つ書く
atexit.register(set_normal_term)
set_curses_term()
# dronekit SITL の起動情報
# example: 'dronekit-sitl copter --home=35.079624,136.905453,50.0,3.0 --instance 0'
sitl_frame = 'copter' # rover, plane, copterなどのビークルタイプ
sitl_home_latitude = '35.894087' # 緯度(度) 柏の葉キャンパス駅前ロータリー
sitl_home_longitude = '139.952447' # 経度(度)
sitl_home_altitude = '17.0' # 高度(m)
sitl_home_direction = '0.0' # 機首方位(度)
sitl_instance_num = 0 # 0〜
# コマンドライン入力したい文字列をリスト形式で作成
sitl_boot_list = ['dronekit-sitl',sitl_frame,
'--home=%s,%s,%s,%s' % (sitl_home_latitude,sitl_home_longitude,sitl_home_altitude,sitl_home_direction),
'--instance=%s'%(sitl_instance_num)]
print '# sitl command: ', sitl_boot_list # 文字列を表示
p = Popen(sitl_boot_list) # サブプロセスの起動
time.sleep(1) # 起動完了のために1秒待つ
# connection_stringの生成
connection_string = 'tcp:localhost:' + str(5760 + int(sitl_instance_num) * 10 ) # インスタンスが増えるとポート番号が10増える
# フライトコントローラ(FC)へ接続
print( "FCへ接続: %s" % (connection_string) ) # 接続設定文字列を表示
vehicle = connect(connection_string, wait_ready=True) # 接続
# ==MQTTの初期化===========================================
client = mqtt.Client() # クラスのインスタンス(実体)の作成
client.on_connect = on_connect # 接続時のコールバック関数を登録
client.on_disconnect = on_disconnect # 切断時のコールバックを登録
client.on_publish = on_publish # メッセージ送信時のコールバック
client.connect("localhost", 1883, 60) # 接続先は自分自身
client.loop_start() # 通信処理スタート
# Ctrl+cが押されるまでループ
try:
while True:
if kbhit(): # 何かキーが押されるのを待つ
key = getch() # 1文字取得
# keyの中身に応じて分岐
if key=='g': # guided
vehicle.mode = VehicleMode( 'GUIDED' )
elif key=='l': # land
vehicle.mode = VehicleMode( 'LAND' )
elif key=='a': # arm
vehicle.armed = True
elif key=='d': # disarm
vehicle.armed = False
elif key=='t': # takeoff
vehicle.simple_takeoff(alt=10)
elif key=='1': # simple_goto
# 柏の葉キャンパス交番上空30mへ
point = LocationGlobalRelative( 35.893246, 139.954909 , 30 )
vehicle.simple_goto(point)
elif key=='2': # simple_goto
# 三井ガーデンホテル上空50mへ
point = LocationGlobalRelative( 35.895236, 139.952468 , 50 )
vehicle.simple_goto(point)
elif key=='r': # RTL
vehicle.mode = VehicleMode( 'RTL' )
# ここはif文と同じインデントなので,キーに関係なく1秒に1回実行される
# 現在の状態を表示
print("--------------------------" )
print(" System status: %s" % vehicle.system_status.state)
print(" Is Armable?: %s" % vehicle.is_armable)
print(" Armed: %s" % vehicle.armed)
print(" Mode: %s" % vehicle.mode.name )
print(" Global Location: %s" % vehicle.location.global_frame)
#==MQTTの送信===========================================
# トピック名は以前と同じ"drone/001"
# 現在の緯度/経度/高度/方位を文字列化(str関数)して送信
client.publish("drone/001", str(vehicle.location.global_frame) )
time.sleep(1) # 1秒ウェイト
except( KeyboardInterrupt, SystemExit): # Ctrl+cが押されたら離脱
print( "SIGINTを検知" )
# フライトコントローラとの接続を閉じる
vehicle.close()
# サブプロセスにもSIGINT送信
p.send_signal(SIGINT)
p.communicate()
time.sleep(1) # 終了完了のために1秒待つ
print("終了.") # 終了メッセージ
プログラム解説
コードの中で,===========のコメントを付けてある部分が,MQTTに関する作業です.
import paho.mqtt.client as mqtt
# ブローカーに接続できたときの処理
def on_connect(client, userdata, flag, rc):
print("Connected with result code " + str(rc))
# ブローカーが切断したときの処理
def on_disconnect(client, userdata, flag, rc):
if rc != 0:
print("Unexpected disconnection.")
# publishが完了したときの処理
def on_publish(client, userdata, mid):
print("publish: {0}".format(mid))
client = mqtt.Client() # クラスのインスタンス(実体)の作成
client.on_connect = on_connect # 接続時のコールバック関数を登録
client.on_disconnect = on_disconnect # 切断時のコールバックを登録
client.on_publish = on_publish # メッセージ送信時のコールバック
client.connect("localhost", 1883, 60) # 接続先は自分自身
client.loop_start() # 通信処理スタート
この3箇所は,前回の記事と同じです.
肝心のPublish部分がこうなっています.
print(" Global Location: %s" % vehicle.location.global_frame)
#==MQTTの送信===========================================
# トピック名は以前と同じ"drone/001"
# 現在の緯度/経度/高度/方位を文字列化(str関数)して送信
client.publish("drone/001", str(vehicle.location.global_frame) )
今までは,print関数を使って,
端末画面上にvehicle.location.global_frame(ドローンの位置情報)を書き出していましたが,
同じものをMQTTでPublishする部分が追加されていることがわかります.
このvehicle.location.global_frameは文字列型ではないので,
str()を使って文字列にしています.
Sub側プログラム
次は,Sub側のプログラムです.
前回使ったファイルsample_sub.pyをそのまま使います.
一応,書いておきますが,すでにファイルがあるはずです.
(ここ を右クリックして[名前を付けて保存])
# !usr/bin/env python
# -*- coding: utf-8 -*-
import paho.mqtt.client as mqtt # MQTTのライブラリをインポート
# ブローカーに接続できたときの処理
def on_connect(client, userdata, flag, rc):
print("Connected with result code " + str(rc)) # 接続できた旨表示
client.subscribe("drone/001") # subするトピックを設定
# ブローカーが切断したときの処理
def on_disconnect(client, userdata, flag, rc):
if rc != 0:
print("Unexpected disconnection.")
# メッセージが届いたときの処理
def on_message(client, userdata, msg):
# msg.topicにトピック名が,msg.payloadに届いたデータ本体が入っている
print("Received message '" + str(msg.payload) + "' on topic '" + msg.topic + "' with QoS " + str(msg.qos))
# MQTTの接続設定
client = mqtt.Client() # クラスのインスタンス(実体)の作成
client.on_connect = on_connect # 接続時のコールバック関数を登録
client.on_disconnect = on_disconnect # 切断時のコールバックを登録
client.on_message = on_message # メッセージ到着時のコールバック
client.connect("localhost", 1883, 60) # 接続先は自分自身
client.loop_forever() # 永久ループして待ち続ける
解説
ポイントとしては,「Pub/Subでトピック名を同じにすること」
ですね.
Pub側が"drone/001"のトピックを使っているので,
Sub側も同じトピック名にしないと受信できません.
例えるならば,
「シリアル通信はボーレートを同じにする」
「ソケット通信はポート番号を同じにする」
「MQTT通信はトピック名を同じにする」
ですね.
実行結果
以下に実行例を載せます.
まずPub側ですが,publish: 1``publish: 2...と
Publishした際のメッセージが出ていることがわかります.
$ python sitl_mqtt_pub.py
dronekitスタート
(sitlの初期化部分は省略)
Connected with result code 0
--------------------------
System status: STANDBY
Is Armable?: False
Armed: False
Mode: STABILIZE
Global Location: LocationGlobal:lat=35.894087,lon=139.952447,alt=None
publish: 1
--------------------------
System status: STANDBY
Is Armable?: False
Armed: False
Mode: STABILIZE
Global Location: LocationGlobal:lat=35.894087,lon=139.952447,alt=None
publish: 2
--------------------------
System status: STANDBY
Is Armable?: False
Armed: False
Mode: STABILIZE
Global Location: LocationGlobal:lat=35.894087,lon=139.952447,alt=None
publish: 3
次にSub側ですが,
受信したメッセージが
'LocationGlobal:lat=35.894087,lon=139.952447,alt=None'
だと出ていることがわかります.
最初は気圧センサーの初期化があるのでalt=Noneになっていますが,
5秒ぐらい経過(5回ぐらい受信)するとalt=17.0へ変わります.
$ python sample_sub.py
Connected with result code 0
Received message 'LocationGlobal:lat=35.894087,lon=139.952447,alt=None' on topic 'drone/001' with QoS 0
Received message 'LocationGlobal:lat=35.894087,lon=139.952447,alt=None' on topic 'drone/001' with QoS 0
Received message 'LocationGlobal:lat=35.894087,lon=139.952447,alt=None' on topic 'drone/001' with QoS 0
IoT向きのメッセージにする(JSON)
上述のプログラムで,ドローンの位置情報をメッセージにして送ることができました.
これを応用すれば,現在のARM状態やフライトモードなども送ることができます.
まあPythonプログラム同士での通信であれば,str()で文字列化したデータを1文としてくっつけて送信するだけでも十分なのですが,
本企画で最終的にしたいことは,Webブラウザからの操縦です.
したがって,
Webブラウザで使われるプログラミング言語JavaScriptとの相性が良いデータフォーマットにしたい
ということです.
というわけで,IoTやクラウドでよく使われている,
JSON型で通信することにします.
JSONに関する詳細については割愛しますが,
今回の流れとしては以下のようになります.
- Pythonの辞書型をJSON型にしてPubする
- JSONでインターネットを流れる
- SubしたJSON型をまた辞書型に戻して表示する
将来的には,3.の部分が
「3. SubしたJSON型をJavaScriptの連想配列にして表示する」
へと代わりますが,それは今後の記事で解説します.
ドローンの情報を辞書型に
今回,ドローンの状態や位置の情報は辞書型に格納します.
具体的には,以下のように定義します.
drone_info = { "status":{ "isArmable":"false",
"Arm":"false",
"FlightMode":"false"
},
"position":{ "latitude":"35.0000",
"longitude":"135.0000",
"altitude":"20",
"heading":"0"
}
}
Pythonの辞書型の詳細説明はここではしませんが,
イメージとしては以下のExcel表を考えてください.
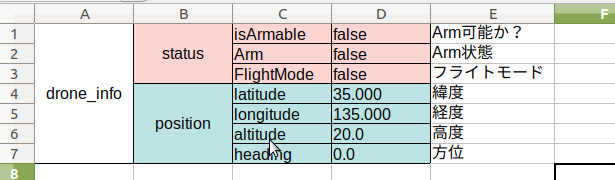
drone_infoという器の中に,status,positionというカテゴリーがあり,
さらにその中身の変数名がisArmable,Arm,...とあるわけです.
辞書型に書き込むとき
辞書型にデータを書き込むときは,
以下のようにカギ括弧内にダブルクォート""で変数名を書くだけで,
どこに書き込むか指定できます.
drone_info["status"]["isArmable"] = str(vehicle.is_armable) # ARM可能か?
辞書型を読み込むとき
また,辞書型の値を取り出したいときは,
書き込むときと同様にカギ括弧内にダブルクォート""で変数名を書くでも良いですが,
全部printしたいときには,以下のように先頭の名前だけ書くこともできます.
print( drone_info )
{'status': {'isArmable': 'False', 'Arm': 'False', 'FlightMode': 'STABILIZE'}, 'position': {'latitude': '35.894087', 'altitude': 'None', 'heading': '0', 'longitude': '139.952447'}}
実行結果を見ると分かりますが,longitudeのデータが後ろにあります.
作成した時の要素の順番は守られないのが辞書型の特徴です.
C言語の構造体と違って,メモリ構造が保たれるわけではないのです.
どちらかというとデータベースに近いですね.
作った時の順番が保たれるOrderedDictという型もありますが, 今回は特に使う必要はありません.
辞書型をJSON型に
JSONを取り扱うには,jsonライブラリをインポートする必要があります.
import json
Python辞書型をJSON型に変換するには,json.dumps関数を使います.
json_message = json.dumps( drone_info ) # drone_infoが辞書型
逆に,JSON型からPython辞書型に戻すときは,json.loads関数を使います.
dict_message = json.loads( msg.payload) # msg.payloadがJSON型
以上の予備知識を使って,プログラムを変更していきます.
Pub側プログラム
Pub側のプログラムです.
以下をコピーするか,
あるいは ここ を右クリックして[名前を付けて保存]してください.
# !usr/bin/env python
# -*- coding: utf-8 -*-
print( "dronekitスタート" ) # 開始メッセージ
# 必要なライブラリをインポート
from kbhit import * # kbhitを使うために必要(同じフォルダにkbhit.pyを置くこと)
from subprocess import Popen # subprocessの中から、Popenをインポート
from signal import signal, SIGINT # Ctrl+C(SIGINT)の送出のために必要
from dronekit import connect # connectを使いたいのでインポート
from dronekit import VehicleMode # VehicleModeも使いたいのでインポート
from dronekit import LocationGlobal, LocationGlobalRelative # ウェイポイント移動に使いたいのでインポート
import time # ウェイト関数time.sleepを使うために必要
import paho.mqtt.client as mqtt # MQTTのライブラリをインポート
import json # json.dumps関数を使いたいのでインポート
# ==MQTTでpubするJSONのベースになる辞書===========================================
drone_info = { "status":{ "isArmable":"false",
"Arm":"false",
"FlightMode":"false"
},
"position":{ "latitude":"35.0000",
"longitude":"135.0000",
"altitude":"20",
"heading":"0"
}
}
# ==MQTT関数の定義===========================================
# ブローカーに接続できたときの処理
def on_connect(client, userdata, flag, rc):
print("Connected with result code " + str(rc))
# ブローカーが切断したときの処理
def on_disconnect(client, userdata, flag, rc):
if rc != 0:
print("Unexpected disconnection.")
# publishが完了したときの処理
def on_publish(client, userdata, mid):
print("publish: {0}".format(mid))
# ==ここからプログラムスタート===========================================
# kbhit()を使うための「おまじない」を最初に2つ書く
atexit.register(set_normal_term)
set_curses_term()
# dronekit SITL の起動情報
# example: 'dronekit-sitl copter --home=35.079624,136.905453,50.0,3.0 --instance 0'
sitl_frame = 'copter' # rover, plane, copterなどのビークルタイプ
sitl_home_latitude = '35.894087' # 緯度(度) 柏の葉キャンパス駅前ロータリー
sitl_home_longitude = '139.952447' # 経度(度)
sitl_home_altitude = '17.0' # 高度(m)
sitl_home_direction = '0.0' # 機首方位(度)
sitl_instance_num = 0 # 0〜
# コマンドライン入力したい文字列をリスト形式で作成
sitl_boot_list = ['dronekit-sitl',sitl_frame,
'--home=%s,%s,%s,%s' % (sitl_home_latitude,sitl_home_longitude,sitl_home_altitude,sitl_home_direction),
'--instance=%s'%(sitl_instance_num)]
print '# sitl command: ', sitl_boot_list # 文字列を表示
p = Popen(sitl_boot_list) # サブプロセスの起動
time.sleep(1) # 起動完了のために1秒待つ
# connection_stringの生成
connection_string = 'tcp:localhost:' + str(5760 + int(sitl_instance_num) * 10 ) # インスタンスが増えるとポート番号が10増える
# フライトコントローラ(FC)へ接続
print( "FCへ接続: %s" % (connection_string) ) # 接続設定文字列を表示
vehicle = connect(connection_string, wait_ready=True) # 接続
# ==MQTTの初期化===========================================
client = mqtt.Client() # クラスのインスタンス(実体)の作成
client.on_connect = on_connect # 接続時のコールバック関数を登録
client.on_disconnect = on_disconnect # 切断時のコールバックを登録
client.on_publish = on_publish # メッセージ送信時のコールバック
client.connect("localhost", 1883, 60) # 接続先は自分自身
client.loop_start() # 通信処理スタート
# Ctrl+cが押されるまでループ
try:
while True:
if kbhit(): # 何かキーが押されるのを待つ
key = getch() # 1文字取得
# keyの中身に応じて分岐
if key=='g': # guided
vehicle.mode = VehicleMode( 'GUIDED' )
elif key=='l': # land
vehicle.mode = VehicleMode( 'LAND' )
elif key=='a': # arm
vehicle.armed = True
elif key=='d': # disarm
vehicle.armed = False
elif key=='t': # takeoff
vehicle.simple_takeoff(alt=10)
elif key=='1': # simple_goto
# 柏の葉キャンパス交番上空30mへ
point = LocationGlobalRelative( 35.893246, 139.954909 , 30 )
vehicle.simple_goto(point)
elif key=='2': # simple_goto
# 三井ガーデンホテル上空50mへ
point = LocationGlobalRelative( 35.895236, 139.952468 , 50 )
vehicle.simple_goto(point)
elif key=='r': # RTL
vehicle.mode = VehicleMode( 'RTL' )
# ここはif文と同じインデントなので,キーに関係なく1秒に1回実行される
# 現在の状態を表示
print("--------------------------" )
print(" System status: %s" % vehicle.system_status.state)
print(" Is Armable?: %s" % vehicle.is_armable)
print(" Armed: %s" % vehicle.armed)
print(" Mode: %s" % vehicle.mode.name )
print(" Global Location: %s" % vehicle.location.global_frame)
drone_info["status"]["isArmable"] = str(vehicle.is_armable) # ARM可能か?
drone_info["status"]["Arm"] = str(vehicle.armed) # ARM状態
drone_info["status"]["FlightMode"] = str(vehicle.mode.name) # フライトモード
drone_info["position"]["latitude"] = str(vehicle.location.global_frame.lat) # 緯度
drone_info["position"]["longitude"] = str(vehicle.location.global_frame.lon)# 経度
drone_info["position"]["altitude"] = str(vehicle.location.global_frame.alt) # 高度
drone_info["position"]["heading"] = str(vehicle.heading) # 方位
print( drone_info ) # 作ったdrone_infoを表示
#==MQTTの送信===========================================
json_message = json.dumps( drone_info ) # 辞書型をJSON型に変換
client.publish("drone/001", json_message ) # トピック名は以前と同じ"drone/001"
time.sleep(1) # 1秒ウェイト
except( KeyboardInterrupt, SystemExit): # Ctrl+cが押されたら離脱
print( "SIGINTを検知" )
# フライトコントローラとの接続を閉じる
vehicle.close()
# サブプロセスにもSIGINT送信
p.send_signal(SIGINT)
p.communicate()
time.sleep(1) # 終了完了のために1秒待つ
print("終了.") # 終了メッセージ
解説
drone_infoという名の辞書型に,
vehicleクラスに格納されているそれぞれのデータを書き込んでいます.
drone_info["status"]["isArmable"] = str(vehicle.is_armable) # ARM可能か?
drone_info["status"]["Arm"] = str(vehicle.armed) # ARM状態
drone_info["status"]["FlightMode"] = str(vehicle.mode.name) # フライトモード
drone_info["position"]["latitude"] = str(vehicle.location.global_frame.lat) # 緯度
drone_info["position"]["longitude"] = str(vehicle.location.global_frame.lon)# 経度
drone_info["position"]["altitude"] = str(vehicle.location.global_frame.alt) # 高度
drone_info["position"]["heading"] = str(vehicle.heading) # 方位
その後,辞書型drone_infoをJSON型json_messageに変換し,
作ったjson_messageの方をpublishしています.
json_message = json.dumps( drone_info )# 辞書型をJSON型に変換
client.publish("drone/001", json_message )
Sub側プログラム
Pub側のプログラムです.
以下をコピーするか,
あるいは ここ を右クリックして[名前を付けて保存]してください.
# !usr/bin/env python
# -*- coding: utf-8 -*-
import paho.mqtt.client as mqtt # MQTTのライブラリをインポート
import json
# ブローカーに接続できたときの処理
def on_connect(client, userdata, flag, rc):
print("Connected with result code " + str(rc)) # 接続できた旨表示
client.subscribe("drone/001") # subするトピックを設定
# ブローカーが切断したときの処理
def on_disconnect(client, userdata, flag, rc):
if rc != 0:
print("Unexpected disconnection.")
# メッセージが届いたときの処理
def on_message(client, userdata, msg):
# msg.topicにトピック名が,msg.payloadに届いたデータ本体が入っている
dict_message = json.loads(msg.payload) # payloadデータはJSONなので,辞書型に変換
print("---------------------------------------")
print("JSON message:" + str(msg.payload) ) # JSONのまま表示
print("Dict message:" + str(dict_message) ) # 辞書で表示
# MQTTの接続設定
client = mqtt.Client() # クラスのインスタンス(実体)の作成
client.on_connect = on_connect # 接続時のコールバック関数を登録
client.on_disconnect = on_disconnect # 切断時のコールバックを登録
client.on_message = on_message # メッセージ到着時のコールバック
client.connect("localhost", 1883, 60) # 接続先は自分自身
client.loop_forever() # 永久ループして待ち続ける
解説
ポイントは1箇所だけ,msg.payloadに届くデータはJSON型なので,
json.loads関数を使って辞書型に戻しています.
dict_message = json.loads(msg.payload)
実行結果
$ python sample_sub_json.py
Connected with result code 0
---------------------------------------
JSON message:{"status": {"isArmable": "False", "Arm": "False", "FlightMode": "STABILIZE"}, "position": {"latitude": "35.894087", "altitude": "None", "heading": "0", "longitude": "139.952447"}}
Dict message:{u'status': {u'isArmable': u'False', u'Arm': u'False', u'FlightMode': u'STABILIZE'}, u'position': {u'latitude': u'35.894087', u'altitude': u'None', u'heading': u'0', u'longitude': u'139.952447'}}
JSONは中括弧{とダブルクォート"を使った純粋な文字列なので,綺麗な形で表示されます.
一方,辞書型は,文字コードがUTF-8であることを示すuが付いてu'status'の様に表示されています.
おわりに
これで,ドローンの位置情報をMQTTで送受信することができるようになりました.
次はいよいよ,Webブラウザでデータを表示するプログラムです.