はじめに
このページは,
の1ページです.
全体を見たい場合は上記ページへお戻りください.
概要
DJI公式のTello用Pythonサンプルプログラム「Tello-Python」のうち,
Tello_Video を前回の記事で改変しました.
しかし,GUIウィンドウを作るライブラリ「Tkinter」を利用している部分は変更していません.
- ウィンドウ無しで操縦したい
- 画像ウィンドウはOpenCVのimshow関数で十分だよ
という人も多いのではないでしょうか.
今回は,それにチャレンジするための準備段階として,「Tello-Python」の中で最も重要なコア部分であるtello.pyのTelloクラスについて説明しようと思います.
前提条件
ホームフォルダにTello-Pythonがインストールされているという前提で話を進めます.
Linuxマシンであれば /home/(ユーザー名)/ に,Tello-Pythonというフォルダがあることになります.
詳しくは Tello-Pythonのダウンロード を御覧ください.
tello.pyの役割
「Tello_Video」のシステム構成を改めて見てみます.
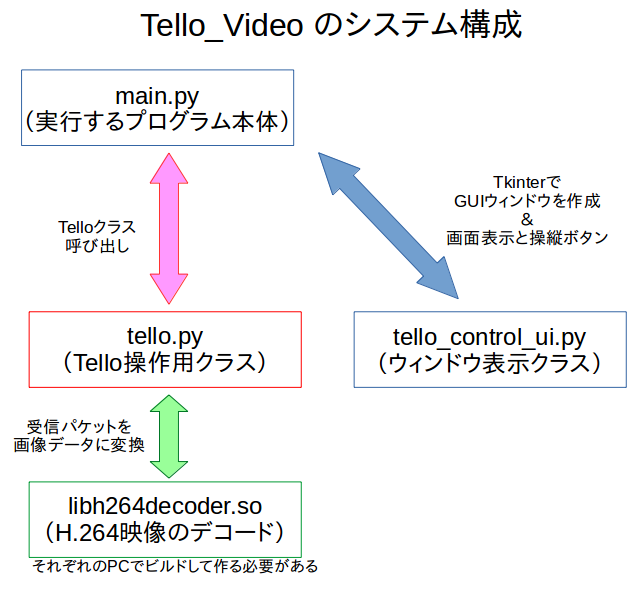
main.pyが実質たった8行のプログラムでした(前回の記事)から,TelloとのUDP通信は全てtello.pyが行っていることになります.
また,Telloから送られてきたH.264の映像データをOpenCVで使える画像データに変換してくれているのもtello.pyです.
つまり,tello.py(Telloクラス)さえ使いこなせれば,機体操縦も画像取得も全部できるのです.
複雑なtello_control_ui.pyなんか不要になります.
それでは,次項からtello.pyを利用した簡単なプログラムを作ってみましょう.
Telloからバッテリー残量を呼び出すプログラム
今回は,tello.pyのTelloクラスを利用して,バッテリーの残量を問い合わせるプログラムを作成します.
新しいディレクトリの作成
まずは,Tello-Pythonディレクトリの下に,新しいディレクトリTello-batteryを作ります.
$ cd ~/Tello-Python/
$ mkdir Tello-battery
$ cd Tello-battery
ソースプログラムの作成
このディレクトリに,以下の2つのファイルを置きます.
ダウンロードする場合は,以下のリンクを右クリックして[名前を付けて保存]などの機能を利用してください.
記事からコピー&ペーストする場合は,tello.py行数が多すぎるので,この記事の末尾に置かせてもらいました.
ここ へ移動して,main.py,tello.pyそれぞれコピーしてテキストエディタ等で保存してください.
このmain.pyとtello.pyは,「Tello_Video」のそれをベースに改造し,日本語コメントを付けてあります.
libh264decoder.soをコピー
システム構成図からもわかるように,tello.py(Telloクラス)の動作には,必ずlibh264decoder.soが必要です.
「Tello_Video」を動かす際にビルドしたものがあるので,それをTello-batteryへコピーします.
$ cp ../Tello_Video/libh264decoder.so ./
以上で準備完了です.
Tello-batteryディレクトリには,3つのファイルがあるはずです.確認しましょう.
$ ls
libh264decoder.so main.py tello.py
この3つが最低限の動作プログラムになります.
プログラムの実行
「Tello_Video」の時と同様に,プログラム本体はmain.pyなので,これをコマンドラインから実行します.
$ python main.py
ctrl+cを押すことで,プログラムを終了できます.
実行結果
問題なく動作すれば,以下の様になるはずです.
$ python main.py
sent: command
sent: streamon
>> send cmd: battery?
ok
[h264 @ 0x1f00e60] non-existing PPS 0 referenced
[h264 @ 0x1f00e60] non-existing PPS 0 referenced
[h264 @ 0x1f00e60] decode_slice_header error
[h264 @ 0x1f00e60] no frame!
[h264 @ 0x1f00e60] non-existing PPS 0 referenced
[h264 @ 0x1f00e60] non-existing PPS 0 referenced
[h264 @ 0x1f00e60] decode_slice_header error
[h264 @ 0x1f00e60] no frame!
>> send cmd: battery?
90
H.264デコーダの出力に混じって,バッテリー残量の問い合わせコマンドbattery?の送信と,応答結果の90(パーセント)が表示されていることがわかります.
main.pyの解説
ではmain.pyの中身を見てみます.
# !/usr/bin/env python
# -*- coding: utf-8 -*-
import tello # tello.pyをインポート
import time # time.sleepを使いたいので
# メイン関数本体
def main():
# 初期化部
# Telloクラスを使って,droneというインスタンス(実体)を作る
drone = tello.Tello('', 8889)
# ループ部
try:
while True: #Ctrl+cが押されるまでループ
print( drone.get_battery() ) # バッテリー残量を問い合わせてプリント
time.sleep(0.3) # 0.3s待つ
except( KeyboardInterrupt, SystemExit): # Ctrl+cが押されたら離脱
print( "SIGINTを検知" )
# 終了処理部
del drone # telloクラスを削除
# "python main.py"として実行された時だけ動く様にするおまじない処理
if __name__ == "__main__": # importされると"__main__"は入らないので,実行かimportかを判断できる.
main() # メイン関数を実行
shebangと文字コード指定
オリジナルのtello.pyと異なり,ソースファイルの冒頭には
# !/usr/bin/env python
# -*- coding: utf-8 -*-
と書いてあります.
この2行は,Pythonプログラムでは「おまじない」と言われている部分で,必ず書いておいたほうが良い,とされています.
1行目の#!/usr/bin/env pythonは,スクリプトを実行するインタプリタを指定しており,「shebang」と言います.
2行目の# -*- coding: utf-8 -*-は,文字コードがutf-8であることを明示しています.
今回のプログラムは日本語でコメントが書いてあるので,2行目が無いとエラーになってしまうのです.
import部分
tello.pyのTelloクラスを使いたいので,import telloと書いてあります.
こう書くことで,main.pyと同じディレクトリにあるtello.pyを呼び出してくれます.
import tello # tello.pyをインポート
import time # time.sleepを使いたいので
メイン関数
メイン関数はdefで定義された関数なので,ここに書かれている段階では実行されません.プログラム末尾のmain()で実行されます.
メイン関数の中身は大きく分けて3つの部分に分かれています.
「初期化」「ループ」「終了処理」です.
# メイン関数本体
def main():
初期化部
ループ部
終了処理部
それぞれ解説していきます.
初期化部
初期化部分は1行だけです.
tello.pyの中で定義されているTelloクラスを使って,droneという名前の実体を作っています.
# Telloクラスを使って,droneというインスタンス(実体)を作る
drone = tello.Tello('', 8889)
droneを作ったので,これ以降はdrone.メンバ名という書式でTelloクラスの中身(メンバ)を使うことができるようになりました.
ループ部
ループ部は実質3行です.
しかし,ctrl+cキーを押すことで終了させるためにtry except処理で挟んであります.
try:
while True: #Ctrl+cが押されるまでループ
print( drone.get_battery() ) # バッテリー残量を問い合わせてプリント
time.sleep(0.3) # 0.3s待つ
except( KeyboardInterrupt, SystemExit): # Ctrl+cが押されたら離脱
print( "SIGINTを検知" )
まずはwhile Trueで永久ループを作っています.ctrl+cの検知はtry exceptにお任せです.
drone.get_battery()で,Telloのバッテリー残量を得ることができます.
Telloクラスの内部では,UDP通信でTelloに"battery?"の文字列を送信し,応答データにバッテリー残量の文字列が入っているのです.
その残量をprintで画面出力しています.
whileループが速すぎるとCPUパワーが100%になってしまうので,適当にtime.sleepでウェイト(待ち時間)を入れています.
終了処理部
終了処理も簡単に1行です.
del drone # telloクラスを削除
初期化部で作ったdroneというインスタンスを,ちゃんと削除してメモリを開放しないといけませんから,delで殺しています.
おわりに
tello.pyのTelloクラスを使う,簡単なプログラム(main.py)を書いてみました.
Telloクラスを使うのって,実は簡単なんです.
Telloクラスには,他のget系のメンバとして
- get_height()
- get_flight_time()
- get_speed()
があるので,get_battery()と同様の方法で現在状態をprintしてみると良いでしょう.
とは言え,情報を見るだけなんてつまらないですね.
次回は,キーボード入力でTelloを操作してみます.
今回使ったプログラム
main.py(Tello-batteryバージョン)
# !/usr/bin/env python
# -*- coding: utf-8 -*-
import tello # tello.pyをインポート
import time # time.sleepを使いたいので
# メイン関数本体
def main():
# Telloクラスを使って,droneというインスタンス(実体)を作る
drone = tello.Tello('', 8889)
#Ctrl+cが押されるまでループ
try:
while True:
print( drone.get_battery() ) # バッテリー残量を問い合わせてプリント
time.sleep(0.3) # 0.3s待つ
except( KeyboardInterrupt, SystemExit): # Ctrl+cが押されたら離脱
print( "SIGINTを検知" )
# telloクラスを削除
del drone
# "python main.py"として実行された時だけ動く様にするおまじない処理
if __name__ == "__main__": # importされると"__main__"は入らないので,実行かimportかを判断できる.
main() # メイン関数を実行
tello.py(日本語コメント付き)
クラス内部で,「コマンド応答」と「ビデオ受信」のスレッドを作り,永久ループ的に回ります.
main.pyの永久ループを含めれば,合計3本のスレッドが並行して走ることになるわけです.
基本的には,デフォルトのdrone = tello.Tello('', 8889)この使い方で十分です.
複数台のEDUを使う方法は,今後の記事で書こうと思います.
# !/usr/bin/env python
# -*- coding: utf-8 -*-
import socket # UDP通信用
import threading # マルチスレッド用
import time # ウェイト時間用
import numpy as np # 画像データの配列用
import libh264decoder # H.264のデコード用(自分でビルドしたlibh264decoder.so)
class Tello:
"""Telloドローンと通信するラッパークラス"""
def __init__(self, local_ip, local_port, imperial=False, command_timeout=.3, tello_ip='192.168.10.1', tello_port=8889):
"""
クラスの初期化.ローカルのIP/ポートをバインドし,Telloをコマンドモードにする.
:param local_ip (str): バインドする(UDPサーバにする)ローカルのIPアドレス
:param local_port (int): バインドするローカルのポート番号
:param imperial (bool): Trueの場合,速度の単位はマイル/時,距離の単位はフィート.
Falseの場合, 速度の単位はkm/h,距離はメートル.デフォルトはFalse
:param command_timeout (int|float): コマンドの応答を待つ時間.デフォルトは0.3秒.
:param tello_ip (str): TelloのIPアドレス.EDUでなければ192.168.10.1
:param tello_port (int): Telloのポート.普通は8889
"""
self.abort_flag = False # 中断フラグ
self.decoder = libh264decoder.H264Decoder() # H.264のデコード関数を登録
self.command_timeout = command_timeout # タイムアウトまでの時間
self.imperial = imperial # 速度と距離の単位を選択
self.response = None # Telloが応答したデータが入る
self.frame = None # BGR並びのnumpy配列 -- カメラの出力した現在の画像
self.is_freeze = False # カメラ出力を一時停止(フリーズ)するかどうかのフラグ
self.last_frame = None # 一時停止時に出力する画像
self.socket = socket.socket(socket.AF_INET, socket.SOCK_DGRAM) # コマンド送受信のソケット
self.socket_video = socket.socket(socket.AF_INET, socket.SOCK_DGRAM) # ビデオストリーム受信用のソケット
self.tello_address = (tello_ip, tello_port) # IPアドレスとポート番号のタプル(変更不可能)
self.local_video_port = 11111 # ビデオ受信のポート番号
self.last_height = 0 # get_heightで確認した最終の高度
self.socket.bind((local_ip, local_port)) # コマンド受信のUDPサーバのスタート(バインド)
# コマンドに対する応答の受信スレッド
self.receive_thread = threading.Thread(target=self._receive_thread) # スレッドの作成
self.receive_thread.daemon = True # メインプロセスの終了と一緒にスレッドが死ぬように設定
self.receive_thread.start() # スレッドスタート
# ビデオ受信の開始 -- コマンド送信: command, streamon
self.socket.sendto(b'command', self.tello_address) # 'command'を送信し,TelloをSDKモードに
print ('sent: command')
self.socket.sendto(b'streamon', self.tello_address) # 'streamon'を送信し,ビデオのストリーミングを開始
print ('sent: streamon')
self.socket_video.bind((local_ip, self.local_video_port)) # ビデオ受信のUDPサーバのスタート(バインド)
# ビデオ受信のスレッド
self.receive_video_thread = threading.Thread(target=self._receive_video_thread) # スレッドの作成
self.receive_video_thread.daemon = True # メインプロセスの終了と一緒にスレッドが死ぬように設定
self.receive_video_thread.start() # スレッドスタート
def __del__(self):
"""ローカルのソケットを閉じる"""
self.socket.close() # コマンド送受信のソケットを閉じる
self.socket_video.close() # ビデオ受信のソケットを閉じる
def read(self):
"""カメラで受信した最新の画像を返す"""
if self.is_freeze: # 一時停止フラグがTrueのときは,保存してある画像を返す
return self.last_frame
else: # そうでないときは,最新の画像を返す
return self.frame
def video_freeze(self, is_freeze=True):
"""ビデオ出力の一時停止 -- is_freezeフラグをTrueにセットすること"""
self.is_freeze = is_freeze # 一時停止フラグの状態をセット
if is_freeze: # Trueのときは,現在の画像をlast_frameに保存しておく
self.last_frame = self.frame
def _receive_thread(self):
"""
Telloからの応答を監視する
スレッドとして走らせる.Telloが最後に返した応答をself.responseに格納する
"""
while True:
try:
self.response, ip = self.socket.recvfrom(3000) # Telloからの応答を受信(最大3000バイトまで一度に受け取れる)
#print(self.response)
except socket.error as exc: # エラー時の処理
print ("Caught exception socket.error : %s" % exc)
def _receive_video_thread(self):
"""
Telloからのビデオストリーミング(H.264のrawデータ)を監視する
スレッドとして走らせる.Telloから受信した最新の画像をself.frameに格納する
"""
packet_data = "" # 変数を初期化
while True:
try:
res_string, ip = self.socket_video.recvfrom(2048) # Telloからの画像データを受信(最大2048バイトまで一度に受け取れる)
packet_data += res_string # packet_dataに受信データを連結して1つの長いデータにする
# フレームの最後
if len(res_string) != 1460: # 受信データのバイト数が1460以外のとき,packet_dataをデコードしframeを得る.
for frame in self._h264_decode(packet_data): # デコードしたデータには何枚分かの画像が入っているので,枚数分繰り返す
self.frame = frame
packet_data = "" # 変数を初期化
except socket.error as exc:
print ("Caught exception socket.error : %s" % exc)
def _h264_decode(self, packet_data):
"""
Telloから受信したH.264の生データをデコードする
:param packet_data: H.264のrawデータ
:return: デコードされた画像のリスト(複数枚の画像が入っていることもある)
"""
res_frame_list = [] # リストの初期化
frames = self.decoder.decode(packet_data) # packet_dataをデコードする
for framedata in frames: # 何枚分かの画像が入っているので,枚数分繰り返す
(frame, w, h, ls) = framedata # データの分解
if frame is not None: # frameの中身が空でないとき
# print 'frame size %i bytes, w %i, h %i, linesize %i' % (len(frame), w, h, ls)
frame = np.fromstring(frame, dtype=np.ubyte, count=len(frame), sep='') # 文字列データをnp.ubyte型の配列に作りなおす
frame = (frame.reshape((h, ls / 3, 3))) # RGBを考慮して3次元配列にする
frame = frame[:, :w, :] # 画像の幅のぶんだけ取り出し,右側のゴミは捨てる
res_frame_list.append(frame) # リストの要素として追加
return res_frame_list # 複数枚の画像が入ったリストとして返す
def send_command(self, command):
"""
Telloへコマンドを送信し,応答を待つ
:param command: 送信するコマンド
:return (str): Telloの応答
"""
print (">> send cmd: {}".format(command))
self.abort_flag = False # 中断フラグを倒す
timer = threading.Timer(self.command_timeout, self.set_abort_flag) # タイムアウト時間が立ったらフラグを立てるタイマースレッドを作成
self.socket.sendto(command.encode('utf-8'), self.tello_address) # コマンドを送信
timer.start() # スレッドスタート
while self.response is None: # タイムアウト前に応答が来たらwhile終了
if self.abort_flag is True: # タイムアウト時刻になったらブレイク
break
timer.cancel() # スレッド中断
if self.response is None: # 応答データが無い時
response = 'none_response'
else: # 応答データがあるとき
response = self.response.decode('utf-8')
self.response = None # _receive_threadスレッドが次の応答を入れてくれるので,ここでは空にしておく
return response # 今回の応答データを返す
def set_abort_flag(self):
"""
self.abort_flagのフラグをTrueにする
send_command関数の中のタイマーで呼ばれる.
この関数が呼ばれるということは,応答が来なくてタイムアウトした,ということ.
"""
self.abort_flag = True
def takeoff(self):
"""
離陸開始
Returns:
str: Telloからの応答.'OK'または'FALSE'.
"""
return self.send_command('takeoff')
def set_speed(self, speed):
"""
スピードを設定
この関数の引数にはkm/hかマイル/hを使う.
Tello APIは 1〜100 センチメートル/秒を使う
Metric: .1 to 3.6 km/h
Imperial: .1 to 2.2 Mile/h
Args:
speed (int|float): スピード
Returns:
str: Telloからの応答.'OK'または'FALSE'.
"""
speed = float(speed)
if self.imperial is True: # 単位系に応じて計算
speed = int(round(speed * 44.704)) # Mile/h -> cm/s
else:
speed = int(round(speed * 27.7778)) # km/h -> cm/s
return self.send_command('speed %s' % speed)
def rotate_cw(self, degrees):
"""
時計回りの旋回
Args:
degrees (int): 旋回角度, 1〜360度
Returns:
str: Telloからの応答.'OK'または'FALSE'.
"""
return self.send_command('cw %s' % degrees)
def rotate_ccw(self, degrees):
"""
反時計回りの旋回
Args:
degrees (int): 旋回角度, 1〜360度.
Returns:
str: Telloからの応答.'OK'または'FALSE'.
"""
return self.send_command('ccw %s' % degrees)
def flip(self, direction):
"""
宙返り
Args:
direction (str): 宙返りする方向の文字, 'l', 'r', 'f', 'b'.
Returns:
str: Telloからの応答.'OK'または'FALSE'.
"""
return self.send_command('flip %s' % direction)
def get_response(self):
"""
Telloの応答を返す
Returns:
int: Telloの応答
"""
response = self.response
return response
def get_height(self):
"""
Telloの高度(dm)を返す
Returns:
int: Telloの高度(dm)
"""
height = self.send_command('height?')
height = str(height)
height = filter(str.isdigit, height)
try:
height = int(height)
self.last_height = height
except:
height = self.last_height
pass
return height
def get_battery(self):
"""
バッテリー残量をパーセンテージで返す
Returns:
int: バッテリー残量のパーセンテージ
"""
battery = self.send_command('battery?')
try:
battery = int(battery)
except:
pass
return battery
def get_flight_time(self):
"""
飛行時間を秒数で返す
Returns:
int: 飛行の経過時間
"""
flight_time = self.send_command('time?')
try:
flight_time = int(flight_time)
except:
pass
return flight_time
def get_speed(self):
"""
現在のスピードを返す
Returns:
int: 現在スピード, km/h または Mile/h
"""
speed = self.send_command('speed?')
try:
speed = float(speed)
if self.imperial is True:
speed = round((speed / 44.704), 1) # cm/s -> mile/h
else:
speed = round((speed / 27.7778), 1) # cm/s -> km/h
except:
pass
return speed
def land(self):
"""
着陸を開始
Returns:
str: Telloからの応答.'OK'または'FALSE'.
"""
return self.send_command('land')
def move(self, direction, distance):
"""
direction の方向へ distance の距離だけ移動する.
この引数にはメートルまたはフィートを使う.
Tello API は 20〜500センチメートルを使う.
Metric: .02 〜 5 メートル
Imperial: .7 〜 16.4 フィート
Args:
direction (str): 移動する方向の文字列,'forward', 'back', 'right' or 'left'.
distance (int|float): 移動する距離.(メートルまたはフィート)
Returns:
str: Telloからの応答.'OK'または'FALSE'.
"""
distance = float(distance)
if self.imperial is True:
distance = int(round(distance * 30.48)) # feet -> cm
else:
distance = int(round(distance * 100)) # m -> cm
return self.send_command('%s %s' % (direction, distance))
def move_backward(self, distance):
"""
distance の距離だけ後進する.
Tello.move()のコメントを見ること.
Args:
distance (int): 移動する距離
Returns:
str: Telloからの応答.'OK'または'FALSE'.
"""
return self.move('back', distance)
def move_down(self, distance):
"""
distance の距離だけ降下する.
Tello.move()のコメントを見ること.
Args:
distance (int): 移動する距離
Returns:
str: Telloからの応答.'OK'または'FALSE'.
"""
return self.move('down', distance)
def move_forward(self, distance):
"""
distance の距離だけ前進する.
Tello.move()のコメントを見ること.
Args:
distance (int): 移動する距離
Returns:
str: Telloからの応答.'OK'または'FALSE'.
"""
return self.move('forward', distance)
def move_left(self, distance):
"""
distance の距離だけ左移動する.
Tello.move()のコメントを見ること.
Args:
distance (int): 移動する距離
Returns:
str: Telloからの応答.'OK'または'FALSE'.
"""
return self.move('left', distance)
def move_right(self, distance):
"""
distance の距離だけ右移動する.
Tello.move()のコメントを見ること.
Args:
distance (int): 移動する距離
Returns:
str: Telloからの応答.'OK'または'FALSE'.
"""
return self.move('right', distance)
def move_up(self, distance):
"""
distance の距離だけ上昇する.
Tello.move()のコメントを見ること.
Args:
distance (int): 移動する距離
Returns:
str: Telloからの応答.'OK'または'FALSE'.
"""
return self.move('up', distance)