タイトルの通り,ROSserial_stm32を利用してSTM32F767ZIとROSで通信を行います。似たような記事はネット上にいくつかあるのですが,何ヵ所か詰まった部分があるので個人的なメモも兼ねて書いていこうと思います。
前提としてUbuntu20.04にROS-noeticとCubeIDEをインストールしておいてください。
ターミナルでの作業
ROSserialなどのインストール
ROSserialをインストールします。
$ sudo apt-get install ros-noetic-rosserial
rosserial_stm32をSrcにcloneします。
$ cd ~/catkin_ws/src
$ git clone https://github.com/yoneken/rosserial_stm32
$ cd ..
$ catkin_make
roslibの生成
exampleのchatterを適当な場所にコピーして,そこにroslibを生成します。
$ roscd rosserial_stm32
$ cd src/ros_lib/examples
$ cp -r chatter ~/Documents
$ cd ~/Documents/chatter
そのフォルダ内で以下のコードを実行します。一番後ろの.を忘れないでください。
$ rosrun rosserial_stm32 make_libralies.py .
この時、選択肢が出てきたら2を選択します。
エラーが出た場合はこちらも参考に
/usr/bin/env:'python':そのようなファイルやディレクトリはありません
と表示された場合は
$ sudo apt-get install python-is-python3
もしくは
$ sudo apt update
$ sudo apt upgrade
で改善するかも。
最後にInc内のcppファイルをSrcに移動させておきましょう。
$ mv Inc/duration.cpp Inc/time.cpp Src
CubeIDEでの作業
次にCubeIDEを開き、File→New→STM32 Projectと順番にクリックします。
STM32F767ZIのボードを選択してからNext>→適当なプロジェクト名を入力→Finishとし,プロジェクトを生成します。
.iocファイルの設定
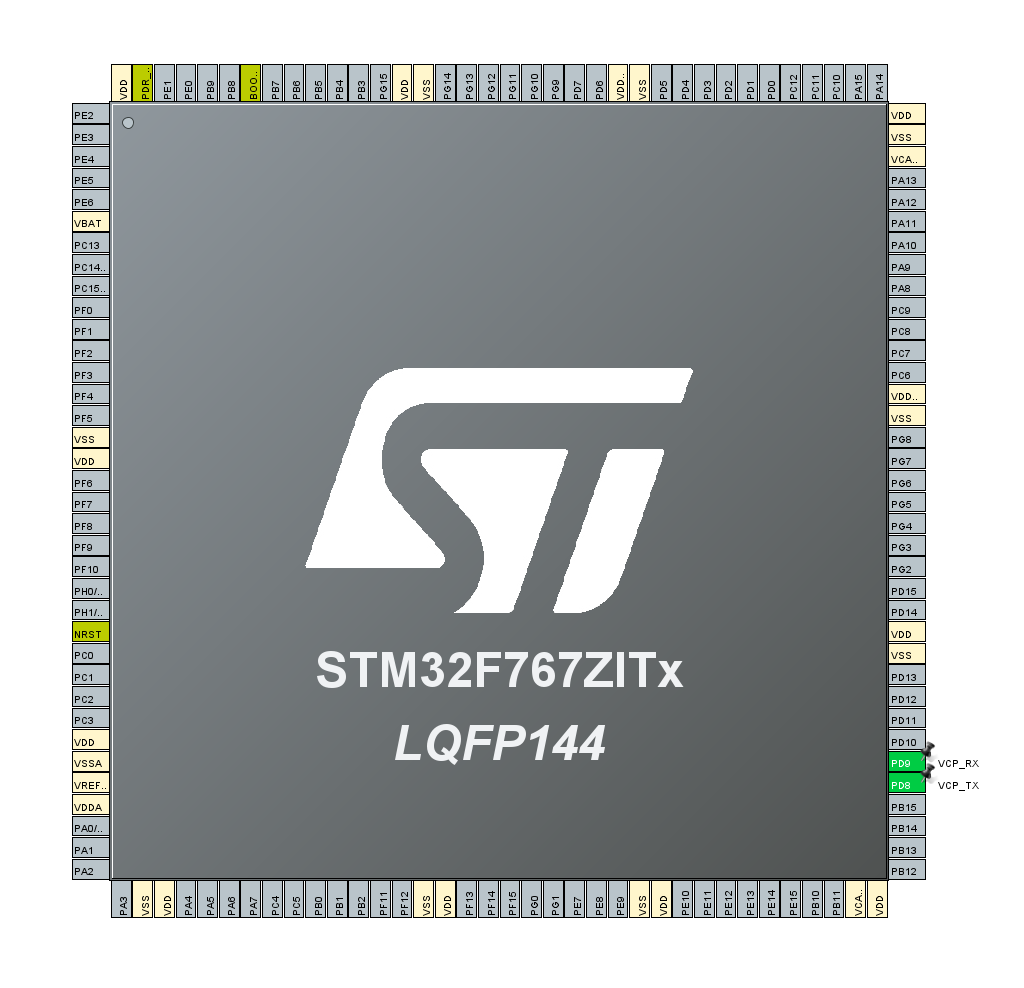
ピン設定
PB8ピンをUSART3_TXに設定し、ユーザーラベルをVCP_TXに,
PB9ピンをUSART3_RXに設定し、ユーザーラベルをVCP_RXにしてください。
USART3の設定
ConnectivityのUSART3の設定を変更します。
| Mode | Asynchronous |
|---|
- Parameter Settings
| Baud Rate | 57600 |
|---|
-
NVIC Settings
USART3 global interruptをチェックします。

-
DMA Settings
Add→USART3TXとして,PriorityをHighに変更します。
Add→USART3RXとして,PriorityをHigh,ModeをCircularに変更します。

TIM2の設定
| ClockSource | InternalClock |
|---|
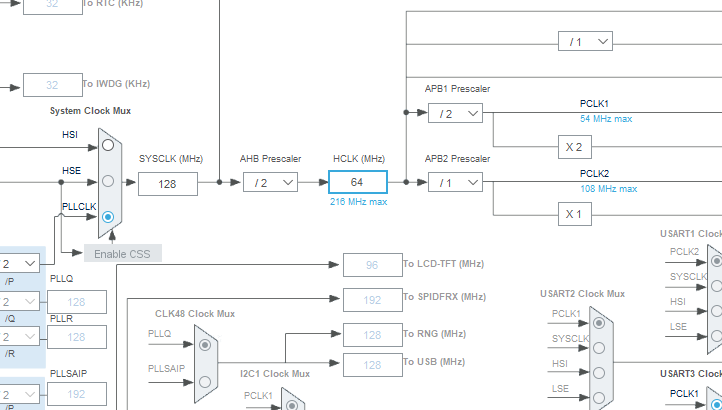
Clock Configurationの設定
HCLK(MHz)をある程度大きな値にします(64MHzで動作確認済み)。
ソースコード関連の作業
先程コピーしたChatterのIncとSrcをコピーして,今回作成したCubeIDEのプロジェクトのCoreフォルダ内に貼り付けます。
できたらCubeIDEに戻って,上のスタンプマークからGenerateCodeしましょう。
プロジェクト設定の変更
Project Explorerに表示されているプロジェクト名を右クリックして
properties→C/C++General→File Typesと進み,Use project settingsにチェックを入れます。
New...をクリックして,
Pattern:*.h
Type: C++ Header File
を追加します。Apply and Closeから閉じましょう。
同様にプロジェクト名を右クリックしてConvert to C++をクリックします。
STM32Hardware.hの修正
Core/Inc/Stm32Hardware.hを修正します。
- 38行目
#define STM32F3xx
↓ ↓ ↓ 変更する
#define STM32F7xx
- 52行目
extern UART_HandleTypeDef huart2;
↓ ↓ ↓ ↓ ↓ 変更する
extern UART_HandleTypeDef huart3;
- 69行目
huart(&huart2), rind(0), twind(0), tfind(0){
↓ ↓ ↓ ↓ ↓ ↓ 変更する
huart(&huart3), rind(0), twind(0), tfind(0){
- 107行目
HAL_UART_Transmit_DMA(huart, &(tbuf), twind);
↓ ↓ ↓ ↓ ↓ ↓ 変更する
HAL_UART_Transmit_DMA(huart, tbuf, twind);
main.cの修正
以下のように変更します。
/*USER CODE BEGIN Include*/
#include "mainpp.h"
/*USER CODE END Include*/
mainpp.cppの変更
今回はROSから送られてきた文章をそのままオウム返しするコードを書きます。
コード全文
#include <mainpp.h>
#include <ros.h>
#include "std_msgs/String.h"
ros::NodeHandle nh;
void callback(const std_msgs::String&);
std_msgs::String str_msg
ros::Publisher f7_pub("f7_data", &str_msg);
ros::Subscriber<std_msgs::String> ros_sub("ros_data", &callback);
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart){
nh.getHardware()->flush();
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){
nh.getHardware()->reset_rbuf();
}
void setup(void)
{
nh.initNode();
nh.advertise(f7_pub);
nh.subscribe(ros_sub);
}
void loop(void)
{
nh.spinOnce();
}
void callback(const std_msgs::String& ros_data){
f7_pub.publish(&ros_data);
}
ビルドできたらマイコンに書き込みましょう。
テスト
初回は以下のコマンドを打ってください。
$ sudo adduser $USER dialout
通常はここからです。すべて別のターミナルで起動します。
$ roscore
$ rosrun rosserial_python serial_node.py _port:=/dev/ttyACM0
$ rostopic pub -r 2 /ros_data std_msgs/String "data: 'hello world!'"
$ rostopic echo /f7_data

(画像右上)rostopic echoで受信できていますね!
ちなみに送受信のデータ量を増やしたければInc/ros.hのtypedefの部分をいじれば良いっぽいです。
typedef NodeHandle_<STM32Hardware, MAX_SUBSCRIBEARS, MAX_PUBLISHERS, INPUT_SIZE, OUTPUT_SIZE> NodeHandle;
MAX_SUBSCRIBEARSはサブスクライバーの最大数,
MAX_PUBLISHERSはパブリッシャーの最大数,
INPUT_SIZEは最大受信データサイズ,
OUTPUT_SIZEは最大送信データサイズです。
終わり
f303などでは割とすんなり動いたのですが,f7だとなかなかうまくいかなかず結構苦労したので,この記事が同じく苦労している人の助けになればと思います。なおcan通信と同時に行うとエラーが発生する?ので解決待ち。