1. 目的
1-1. やりたいこと
2次元平面上の3つ以上の点に対して、尤もらしい円を求めたい。
この円を「回帰円」と呼ぶことにする。
1-2. 活用例
「渦巻き状の図形の、"半径"を評価する」など。
渦巻きは、「半径が増加する円」とみなすことができる。
逆に言えば、渦巻きの半径は一定ではなく、位置によって変化する。
渦巻きの、「ある地点での半径」を求めたいときに、周辺の3点を選び、その回帰円の半径を採用することが出来る。
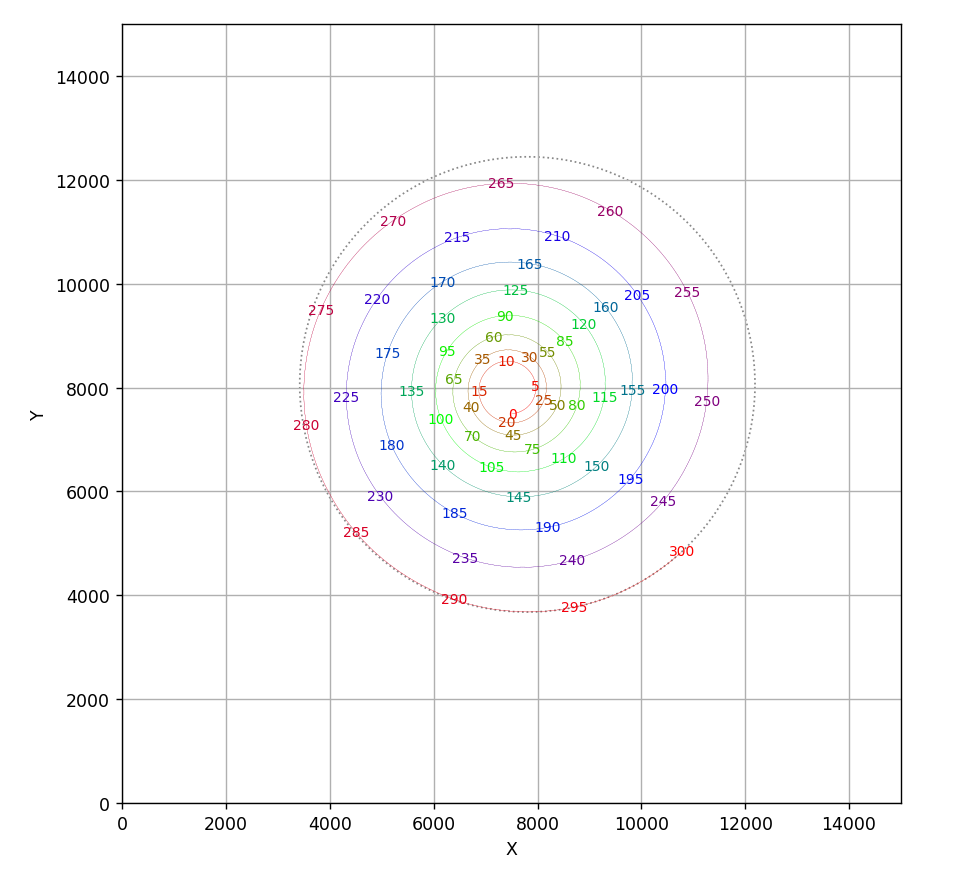
渦巻きの例。灰色の破線は、点295,296,297,298,299,300の回帰円。半径は5028.01
2. 理論
円の方程式を線形回帰の形に持ち込み、最小二乗法によりパラメータを求めれば、回帰円を求めることが出来る。
2-1. 円の方程式
中心 $(x_e, y_e)$ で半径$r$ の円の方程式は
$$ (x-x_e)^2+(y-y_e)^2 = r^2 $$
である。
2-2. 線形回帰の形に変形
円の方程式を線形回帰の形にすると、
$$A\overrightarrow{c}-\overrightarrow{b}=\overrightarrow{\varepsilon}$$
となる。但し
$$ A =
\begin{pmatrix}
x_0 & y_0 & 1\\
x_1 & y_1 & 1\\
& \vdots \\
x_{n-1} & y_{n-1} & 1
\end{pmatrix},
\overrightarrow{b} =
\begin{pmatrix}
x_0^2+y_0^2\\
x_1^2+y_1^2\\
\vdots \\
x_{n-1}^2 + y_{n-1}^2
\end{pmatrix},
\overrightarrow{c}=
\begin{pmatrix}
2x_e \\
2y_e \\
-(x_e^2+y_e^2-r^2)
\end{pmatrix}
$$
であり、 $\overrightarrow{\varepsilon}$ は残差を表す。
解説
線形回帰の形とは、$A\overrightarrow{c}-\overrightarrow{b}=\overrightarrow{\varepsilon}$ のことである。
但し、
- $A\overrightarrow{c}$ は理論値、 $\overrightarrow{b}$ は観測値、 $\overrightarrow{\varepsilon}$ は残差をそれぞれ表す、サンプルサイズ$n$だけ長さを持つ列ベクトルである。
- $\overrightarrow{c}$はパラメータ群を表す、パラメータ数 $p$ だけ長さを持つ列ベクトルであり、
$A$ はデータを表す長さ $p$ の行ベクトル を $n$ 個積み重ねた $n$行$p$列の行列である。
この $A\overrightarrow{c}-\overrightarrow{b}=\overrightarrow{\varepsilon}$ の形に、円の方程式を無理矢理変形すればよい。
さて、円の方程式を変形すると
$$2x_ex+2y_ey-(x_e^2+y_e^2-r^2)-(x^2+y^2)=0$$
となる。ここで、
$$\overrightarrow{c}=
\begin{pmatrix}
2x_e \\
2y_e \\
-(x_e^2+y_e^2-r^2)
\end{pmatrix},
\overrightarrow{a}=
\begin{pmatrix}
x & y & 1
\end{pmatrix},
b=x^2+y^2
$$
とすると、円の方程式は
$$\overrightarrow{a}
\overrightarrow{c}-b=0$$
となる。
ここに、点 $(x_i, y_i)$ ($i$ は$0$から$n-1$までの整数) を$(x,y)$ に代入し、回帰円との残差が $\varepsilon_i$ であったとすると
$$\overrightarrow{a}_i
\overrightarrow{c}-b_i=\varepsilon_i$$
となる。但し $\overrightarrow{a}_i =
\begin{pmatrix}
x_i & y_i & 1
\end{pmatrix},
b_i = x_i^2+y_i^2
$である。
さて、行ベクトル$\overrightarrow{a}_i$もスカラ$b_i$もスカラ$\varepsilon_i$も「1行の行列」とみなせなくもないが、これを$n$行に拡張した行列$A$や$\overrightarrow{b}$や$\overrightarrow{\varepsilon}$を考える。
$$ A =
\begin{pmatrix}
x_0 & y_0 & 1\\
x_1 & y_1 & 1\\
& \vdots \\
x_{n-1} & y_{n-1} & 1
\end{pmatrix},
\overrightarrow{b} =
\begin{pmatrix}
x_0^2+y_0^2\\
x_1^2+y_1^2\\
\vdots \\
x_{n-1}^2 + y_{n-1}^2
\end{pmatrix},
\overrightarrow{\varepsilon} =
\begin{pmatrix}
\varepsilon_0\\
\varepsilon_1\\
\vdots \\
\varepsilon_{n-1}
\end{pmatrix}
$$
としたとき、
$$A\overrightarrow{c}-\overrightarrow{b}=\overrightarrow{\varepsilon}$$
が成り立つ。
(解説ここまで)
目的は、残差 $\overrightarrow{\varepsilon}$ の各成分を最小にすることなので、
そのような $\overrightarrow{c}$、つまり $A\overrightarrow{c}-\overrightarrow{b}$ を最も $\overrightarrow{0}$ に近づける $\overrightarrow{c}$ 、
つまり$\left|A\overrightarrow{c}-\overrightarrow{b}\right|$を最小にする$\overrightarrow{c}$ を探せばよい。
2-3. 正規方程式
$\left|A\overrightarrow{c}-\overrightarrow{b}\right|$を最小にするような$\overrightarrow{c}$を最小二乗法で見つけるには、次の正規方程式を解けばよい。
$$A^TA\overrightarrow{c}=A^T\overrightarrow{b}$$
導出
そもそも最小二乗法とは、残差の2乗和$$E = \sum^{n-1}_{i=0}\varepsilon_i^2$$
を、各パラメータ、つまり$\overrightarrow{c}$の各成分で偏微分した結果が0となることを連立方程式にして解くものだった。
この $E$ は $\left|\overrightarrow{\varepsilon}\right|^2$ そのものであるから、
$$
\begin{array}{lll}
E=\left|\overrightarrow{\varepsilon}\right|^2 &=& \left|A\overrightarrow{c}-\overrightarrow{b}\right|^2 \\
&=& \left(A\overrightarrow{c}-\overrightarrow{b}\right)^T\left(A\overrightarrow{c}-\overrightarrow{b}\right)\\
&=& \left(
\left(A\overrightarrow{c}\right)^T-{\overrightarrow{b}}^T
\right)
\left(A\overrightarrow{c}-\overrightarrow{b}\right)\\
&=& \left(
\left(A\overrightarrow{c}\right)^T-{\overrightarrow{b}}^T
\right)A\overrightarrow{c}
- \left(
\left(A\overrightarrow{c}\right)^T-{\overrightarrow{b}}^T
\right)\overrightarrow{b}\\
&=& \left(A\overrightarrow{c}\right)^TA\overrightarrow{c}
-{\overrightarrow{b}}^TA\overrightarrow{c}
-\left(
\left(A\overrightarrow{c}\right)^T\overrightarrow{b}
- {\overrightarrow{b}}^T\overrightarrow{b}
\right)\\
&=&\left|A\overrightarrow{c}\right|^2- \overrightarrow{b}\bullet A\overrightarrow{c}
-\left(
A\overrightarrow{c}\bullet\overrightarrow{b} - \left|\overrightarrow{b}\right|^2
\right)\\
&=&\left|A\overrightarrow{c}\right|^2-2\overrightarrow{b}\bullet A\overrightarrow{c}+\left|\overrightarrow{b}\right|^2\\
&=&\sum^{n-1}_{i=0}\left(
\left(\sum^{p-1}_{j=0}A_{i,j}c_j
\right)^2
\right)
-2\sum^{n-1}_{i=0}\left(
b_i\sum^{p-1}_{j=0}A_{i,j}c_j
\right)
+\sum^{n-1}_{i=0}b_i^2
\end{array}
$$
である。これを $c_k$ で偏微分すると
$$
\begin{array}{lll}
\frac{\partial E}{\partial c_k}
&=& \sum^{n-1}_{i=0}\left(
\frac{\partial}{\partial c_k}\left(\sum^{p-1}_{j=0}A_{i,j}c_j
\right)^2
\right)
-2\sum^{n-1}_{i=0}\left(
b_i \frac{\partial}{\partial c_k}\sum^{p-1}_{j=0}A_{i,j}c_j
\right)
+\sum^{n-1}_{i=0}\frac{\partial}{\partial c_k}b_i^2\\
&=&\sum^{n-1}_{i=0}\left(
\frac{\partial}{\partial c_k}\left(\sum^{p-1}_{j=0}A_{i,j}c_j
\right)^2
\right)
-2\sum^{n-1}_{i=0}\left(
b_i A_{i,k}
\right)\\
&=&\sum^{n-1}_{i=0}\left(
2\left(\sum^{p-1}_{j=0}A_{i,j}c_j\right)
\frac{\partial}{\partial c_k}\sum^{p-1}_{j=0}A_{i,j}c_j
\right)
-2\sum^{n-1}_{i=0}\left(
b_i A_{i,k}
\right)\\
&=&2\sum^{n-1}_{i=0}\left(
\left(\sum^{p-1}_{j=0}A_{i,j}c_j\right)A_{i,k}
\right)
-2\sum^{n-1}_{i=0}\left(
b_i A_{i,k}
\right)\\
&=&2\sum^{n-1}_{i=0}\left(
A^T_{k,i}\left(\sum^{p-1}_{j=0}A_{i,j}c_j\right)
\right)
-2\sum^{n-1}_{i=0}\left(
A^T_{k,i} b_i
\right)\\
&=&2\sum^{n-1}_{i=0}\left(
A^T_{k,i}\left(A\overrightarrow{c}\right)_i
\right)
-2\sum^{n-1}_{i=0}\left(
A^T_{k,i} b_i
\right)\\
&=&2\left(A^TA\overrightarrow{c}\right)_k-2\left(A^T\overrightarrow{b}\right)_k
\end{array}
$$
これが $0$ になればいいので、
$$\left(A^TA\overrightarrow{c}\right)_k-\left(A^T\overrightarrow{b}\right)_k=0$$
これがすべての$k$で成り立つわけだから
$$A^TA\overrightarrow{c}-A^T\overrightarrow{b}=\overrightarrow{0}$$
あとはこれを移項するだけで正規方程式
$$A^TA\overrightarrow{c}=A^T\overrightarrow{b}$$
が示される。
(導出ここまで)
2-4. 正規方程式を解く
正規方程式$A^TA\overrightarrow{c}=A^T\overrightarrow{b}$はガウスの消去法(掃き出し法)で$\overrightarrow{c}=...$の形に解ける。
このようにして$\overrightarrow{c}$ が求められれば、 $x_e, y_e, r$ も求められる。
ガウスの消去法の解説
ガウスの消去法とは、 $A\overrightarrow{x}=\overrightarrow{y}$ の形の、長さ$n$の列ベクトル方程式を、 $\overrightarrow{x}=...$ の形に変換するための手法である。($A$ は $n$行$n$列)
この手法は「前進消去」と「後退代入」という2つのフェーズに分けられる。
前進消去
前進消去では、次のような変形を行う。
$$
\begin{pmatrix}
A_{0,0} & A_{0,1} & A_{0,2} & \cdots & A_{0,n-1} \\
A_{1,0} & A_{1,1} & A_{1,2} & \cdots & A_{1,n-1} \\
A_{2,0} & A_{2,1} & A_{2,2} & \cdots & A_{2,n-1} \\
\vdots & \vdots & \vdots & \ddots & \vdots \\
A_{n-1,0} & A_{n-1,1} & A_{n-1,2} & \cdots & A_{n-1,n-1}
\end{pmatrix} \overrightarrow{x}=\begin{pmatrix}
y_0 \\ y_1 \\ y_2 \\ \vdots \\ y_{n-1}
\end{pmatrix}
$$
$1$以上$n$未満 の 各整数 $j$ について、
$j$行目から$0$行目 の $\frac{A_{j,0}}{A_{0,0}}$ 倍を引く
$$
\left(\begin{array}{lllll}
A_{0,0} & A_{0,1} & A_{0,2} & \cdots & A_{0,n-1} \\
0
& A_{1,1}-A_{0,1}\frac{A_{1,0}}{A_{0,0}}
& A_{1,2}-A_{0,2}\frac{A_{1,0}}{A_{0,0}}
& \cdots
& A_{1,n-1}-A_{0,n-1}\frac{A_{1,0}}{A_{0,0}} \\
0
& A_{2,1}-A_{0,1}\frac{A_{2,0}}{A_{0,0}}
& A_{2,2}-A_{0,2}\frac{A_{2,0}}{A_{0,0}}
& \cdots
& A_{2,n-1}-A_{0,n-1}\frac{A_{2,0}}{A_{0,0}} \\
\vdots & \vdots & \vdots & \ddots & \vdots \\
0
& A_{n-1,1}-A_{0,1}\frac{A_{n-1,0}}{A_{0,0}}
& A_{n-1,2}-A_{0,2}\frac{A_{n-1,0}}{A_{0,0}}
& \cdots
& A_{n-1,n-1}-A_{0,n-1}\frac{A_{n-1,0}}{A_{0,0}}
\end{array}\right) \overrightarrow{x}=\left(\begin{array}{l}
y_0 \\ y_1-y_0\frac{A_{1,0}}{A_{0,0}} \\ y_2-y_0\frac{A_{2,0}}{A_{0,0}} \\ \vdots \\ y_{n-1}-y_0\frac{A_{n-1,0}}{A_{0,0}}
\end{array}\right)
$$
$1$以上$n$未満の整数$j$, $0$以上$n$未満の整数$k$について、
$A^{(1)}_{j,k}=A_{j,k}-A_{0,k}\frac{A_{j,0}}{A_{0,0}}$, $y^{(1)}_j=y_j-y_0\frac{A_{j,0}}{A_{0,0}}$ と定義すると、上記の式は
$$
\begin{pmatrix}
A_{0,0} & A_{0,1} & A_{0,2} & \cdots & A_{0,n-1} \\
0 & A^{(1)}_{1,1} & A^{(1)}_{1,2} & \cdots & A^{(1)}_{1,n-1} \\
0 & A^{(1)}_{2,1} & A^{(1)}_{2,2} & \cdots & A^{(1)}_{2,n-1} \\
\vdots & \vdots & \vdots & \ddots & \vdots \\
0 & A^{(1)}_{n-1,1} & A^{(1)}_{n-1,2} & \cdots & A^{(1)}_{n-1,n-1}
\end{pmatrix} \overrightarrow{x}=\begin{pmatrix}
y_0 \\ y^{(1)}_1 \\ y^{(1)}_2 \\ \vdots \\ y^{(1)}_{n-1}
\end{pmatrix}
$$
となる。
$2$以上$n$未満 の 各整数 $j$ について、
$j$行目から$1$行目 の $\frac{A^{(1)}_{j,1}}{A^{(1)}_{1,1}}$ 倍を引く
$$
\left(\begin{array}{lllll}
A_{0,0} & A_{0,1} & A_{0,2} & \cdots & A_{0,n-1} \\
0 & A^{(1)}_{1,1} & A^{(1)}_{1,2} & \cdots & A^{(1)}_{1,n-1} \\
0
& 0
& A^{(1)}_{2,2}-A^{(1)}_{1,2}\frac{A^{(1)}_{2,1}}{A^{(1)}_{1,1}}
& \cdots
& A^{(1)}_{2,n-1}-A^{(1)}_{1,n-1}\frac{A^{(1)}_{2,1}}{A^{(1)}_{1,1}} \\
\vdots & \vdots & \vdots & \ddots & \vdots \\
0
& 0
& A^{(1)}_{n-1,2}-A^{(1)}_{1,2}\frac{A^{(1)}_{n-1,1}}{A^{(1)}_{1,1}}
& \cdots
& A^{(1)}_{n-1,n-1}-A^{(1)}_{1,n-1}\frac{A^{(1)}_{n-1,1}}{A^{(1)}_{1,1}}
\end{array}\right) \overrightarrow{x}=\left(\begin{array}{l}
y_0 \\ y^{(1)}_1 \\ y^{(1)}_2-y^{(1)}_{1}\frac{A^{(1)}_{2,1}}{A^{(1)}_{1,1}} \\ \vdots \\ y^{(1)}_{n-1}-y^{(1)}_{1}\frac{A^{(1)}_{n-1,1}}{A^{(1)}_{1,1}}
\end{array}\right)
$$
$2$以上$n$未満の整数$j$, $0$以上$n$未満の整数$k$について、
$A^{(2)}_{j,k}=A^{(1)}_{j,k}-A^{(1)}_{1,k}\frac{A^{(1)}_{j,1}}{A^{(1)}_{1,1}}$, $y^{(2)}_j=y^{(1)}_j-y^{(1)}_1\frac{A^{(1)}_{j,1}}{A^{(1)}_{1,1}}$ と定義すると、上記の式は
$$
\begin{pmatrix}
A_{0,0} & A_{0,1} & A_{0,2} & \cdots & A_{0,n-1} \\
0 & A^{(1)}_{1,1} & A^{(1)}_{1,2} & \cdots & A^{(1)}_{1,n-1} \\
0 & 0 & A^{(2)}_{2,2} & \cdots & A^{(2)}_{2,n-1} \\
\vdots & \vdots & \vdots & \ddots & \vdots \\
0 & 0 & A^{(2)}_{n-1,2} & \cdots & A^{(2)}_{n-1,n-1}
\end{pmatrix} \overrightarrow{x}=\begin{pmatrix}
y_0 \\ y^{(1)}_1 \\ y^{(2)}_2 \\ \vdots \\ y^{(2)}_{n-1}
\end{pmatrix}
$$
となる。
一般に $0$ 以上 $n$ 未満の 各整数 $i$ について、
$i+1$以上$n$未満 の 各整数 $j$ について、
$j$行目から$i$行目 の $\frac{A^{(i)}_{j,i}}{A^{(i)}_{i,i}}$ 倍を引き、
$0$以上$n$未満の整数$k$について、
$A^{(i+1)}_{j,k}=A^{(i)}_{j,k}-A^{(i)}_{i,k}\frac{A^{(i)}_{j,i}}{A^{(i)}_{i,i}}$, $y^{(i+1)}_j=y^{(i)}_j-y^{(i)}_i\frac{A^{(i)}_{j,i}}{A^{(i)}_{i,i}}$ と定義すると、
式は最終的に
$$
\begin{pmatrix}
A_{0,0} & A_{0,1} & A_{0,2} & \cdots & A_{0,n-1} \\
0 & A^{(1)}_{1,1} & A^{(1)}_{1,2} & \cdots & A^{(1)}_{1,n-1} \\
0 & 0 & A^{(2)}_{2,2} & \cdots & A^{(2)}_{2,n-1} \\
\vdots & \vdots & \vdots & \ddots & \vdots \\
0 & 0 & 0 & \cdots & A^{(n-1)}_{n-1,n-1}
\end{pmatrix} \overrightarrow{x}=\begin{pmatrix}
y_0 \\ y^{(1)}_1 \\ y^{(2)}_2 \\ \vdots \\ y^{(n-1)}_{n-1}
\end{pmatrix}
$$
となる。
後退代入
後退代入では、次のような計算を行う。
$$
\begin{pmatrix}
A_{0,0} & \cdots & A_{0,n-3} & A_{0,n-2} & A_{0,n-1} \\
\vdots & \ddots & \vdots & \vdots & \vdots \\
0 & \cdots & A^{(n-3)}_{n-3,n-3} & A^{(n-3)}_{n-3,n-2} & A^{(n-3)}_{n-3,n-1} \\
0 & \cdots & 0 & A^{(n-2)}_{n-2,n-2} & A^{(n-2)}_{n-2,n-1} \\
0 & \cdots & 0 & 0 & A^{(n-1)}_{n-1,n-1}
\end{pmatrix} \overrightarrow{x}=\begin{pmatrix}
y_0 \\ \vdots \\ y^{(n-3)}_{n-3} \\ y^{(n-2)}_{n-2} \\ y^{(n-1)}_{n-1}
\end{pmatrix}
$$
分かりにくいので、これを
$$
\begin{pmatrix}
A_{0,0}' & \cdots & A_{0,n-3}' & A_{0,n-2}' & A_{0,n-1}' \\
\vdots & \ddots & \vdots & \vdots & \vdots \\
0 & \cdots & A_{n-3,n-3}' & A_{n-3,n-2}' & A_{n-3,n-1}' \\
0 & \cdots & 0 & A_{n-2,n-2}' & A_{n-2,n-1}' \\
0 & \cdots & 0 & 0 & A_{n-1,n-1}'
\end{pmatrix}
\begin{pmatrix}
x_0 \\
\vdots \\
x_{n-3} \\
x_{n-2} \\
x_{n-1}
\end{pmatrix}
=\begin{pmatrix}
y_0' \\ \vdots \\ y_{n-3}' \\ y_{n-2}' \\ y_{n-1}'
\end{pmatrix}
$$
と書き直す。
$n-1$行目に注目すると、
$$
\begin{array}{rlcc}
0x_0+...+0x_{n-3}+0x_{n-2}+A_{n-1,n-1}'x_{n-1}& &=& y_{n-1}'\\
A_{n-1,n-1}'x_{n-1}&+\sum_{j=n}^{n-1}\left(A_{n-1,j}'x_{j}\right) &=& y_{n-1}'
\end{array}
$$
なので、
$$x_{n-1}=\frac{y_{n-1}'-\sum_{j=n}^{n-1}\left(A_{n-1,j}'x_{j}\right)}{A_{n-1,n-1}'}$$ である。
但し、 $\sum_{j=n}^{n-1}\left(A_{n-1,j}'x_{j}\right)$ は$j$の開始 $n$ が終了 $n-1$よりも大きいため、$0$である。
$n-2$行目に注目すると、
$$
\begin{array}{rlcc}
0x_0+...+0x_{n-3}+A_{n-2,n-2}'x_{n-2}&+A_{n-2,n-1}'x_{n-1} &=& y_{n-2}'\\
A_{n-2,n-2}'x_{n-2}&+\sum_{j=n-1}^{n-1}\left(A_{n-2,j}'x_{j}\right) &=& y_{n-2}'
\end{array}
$$
なので、
$$x_{n-2}=\frac{y_{n-2}'-\sum_{j=n-1}^{n-1}\left(A_{n-2,j}'x_{j}\right)}{A_{n-2,n-2}'}$$ である。
但し、 $\sum_{j=n-1}^{n-1}\left(A_{n-2,j}'x_{j}\right)$ に出てくる $x_j$ は $x_{n-1}$ のみであり、これは先ほど求めたので、結局 $x_{n-2}$ も求められる。
一般に $i$に$n-1, n-2, n-3, ..., 0$ をこの順に代入した場合について、
$i$行目に注目すると、
$$
\begin{array}{rlcc}
A_{i,i}'x_{i}&+\sum_{j=i+1}^{n-1}\left(A_{i,j}'x_{j}\right) &=& y_{i}'
\end{array}
$$
なので、
$$x_{i}=\frac{y_{i}'-\sum_{j=i+1}^{n-1}\left(A_{i,j}'x_{j}\right)}{A_{i,i}'}$$ である。
但し、$\sum_{j=i+1}^{n-1}\left(A_{i,j}'x_{j}\right)$ に出てくる $x_j$ はすべて事前に求められている。
以上で、 $\overrightarrow{x}$ (の各成分)が求められた。
(ガウスの消去法の解説ここまで)
3. コーディング (python)
def fit_circle(points:list[tuple[float, float]])->tuple[float, float, float]:
A:list[list[float]] = []
b:list[float] = []
for (x, y) in points:
A.append([x, y, 1])
b.append(x**2 + y**2)
# 行列の転置と積を計算
AT:list[list[float]] = [[A[j][i] for j in range(len(A))] for i in range(3)]
ATA:list[list[float]] = [
[sum(AT[i][k] * A[k][j] for k in range(len(A))) for j in range(3)]
for i in range(3)
]
ATb:list[float] = [
sum(AT[i][k] * b[k] for k in range(len(b))) for i in range(3)
]
# ガウスの消去法で解を求める
def gauss_eliminate(A:list[list[float]], y:list[float])->list[float]:
n:int = len(y)
# 前進消去
for i in range(n):
for j in range(i + 1, n):
ratio:float = A[j][i] / A[i][i]
for k in range(n):
A[j][k] -= ratio * A[i][k]
y[j] -= ratio * y[i]
# 後退代入
x:list[float] = [0.0] * n
for i in range(n-1, -1, -1):
x[i] = (
y[i] - sum(A[i][j] * x[j] for j in range(i + 1, n))
) / A[i][i]
return x
c:list[float] = gauss_eliminate(ATA, ATb)
xe:float = c[0] / 2
ye:float = c[1] / 2
r:float = (xe**2 + ye**2 + c[2]) ** 0.5
return (xe, ye, r)
例0、 点 $(0,0), (1,1), (2,3)$ に対する回帰円を求めたいなら、次のようにする。
>>> points = [(0,0), (1,1), (2,3)]
>>> fit_circle(points)
(-3.4999999999999774, 4.499999999999985, 5.700877125495664)
こうして、 中心 $(-3.5, 4.5)$、半径 $5.7$ の回帰円が求められた。

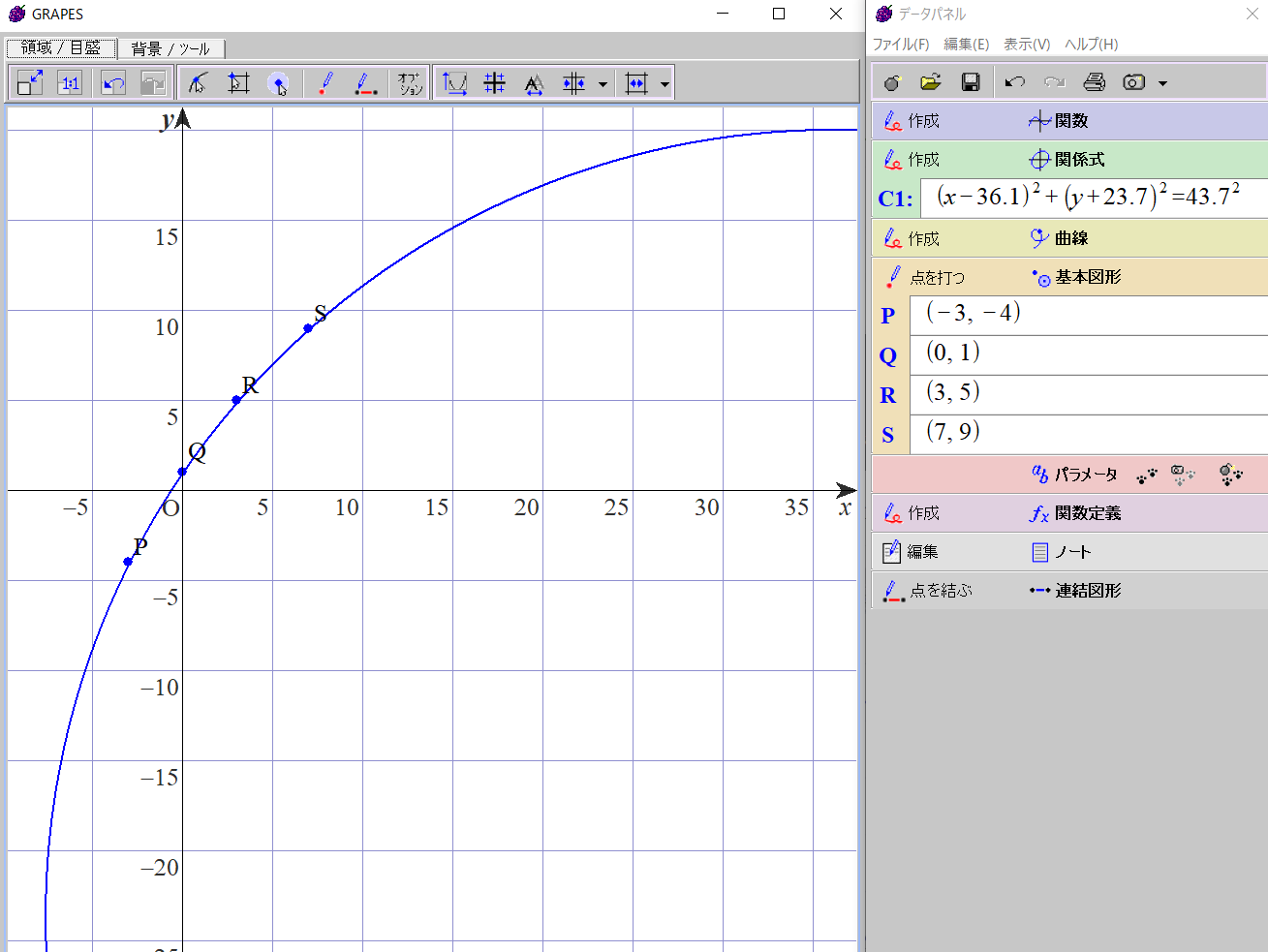
例1、 点 $(-3,-4), (0,1), (3,5), (7,9)$ に対する回帰円を求めたいなら、次のようにする。
>>> points = [(-3,-4), (0,1), (3,5), (7,9)]
>>> fit_circle(points)
(36.09310344827625, -23.65862068965548, 43.74630271450496)
こうして、 中心 $(36.1, -23.7)$、半径 $43.7$ の回帰円が求められた。
4. 終わりに
3章のコードはまだまだ完ぺきではない。
例えば、点が直線上に並ぶ場合は、回帰円の半径が理論上無限大となり、この計算を行うと ZeroDivisionError が発生する。