0.はじめに
「スモウルボットにボタンを追加する」でも書きましたが、スモウルボットの中央にあるマイコン「ATMEGA328P-PU」には未使用の端子があり、書籍「Arduinoをはじめよう(O'REILLY Make:PROJECTSシリーズ)」の巻末のマイコンの図を見ると
・Digital3
・Digital4
・Analog5
・Analog4
・Analog3
・Analog2
・Digital12
・GND
に該当するPinが未使用のようです。
今回、明度センサー(NJL7502L)を追加してみようと思います。明度センサーから取得できる値は、ボタンの押された(ON)、押されていない(OFF)のようにデジタルではなく、周りの明るさなので信号線はアナログの端子に接続しようと思います。今回は、Analog3(スモウルボットのブレッドボードではj15の位置)に接続します。あと電源も必要です。
スモウルボットに流れている電圧は5Vですが、怪我をしないように、配線が合っているか、また、不要な線が繋がっていないかを確認しながら作業を進めましょう。
1.完成予定図
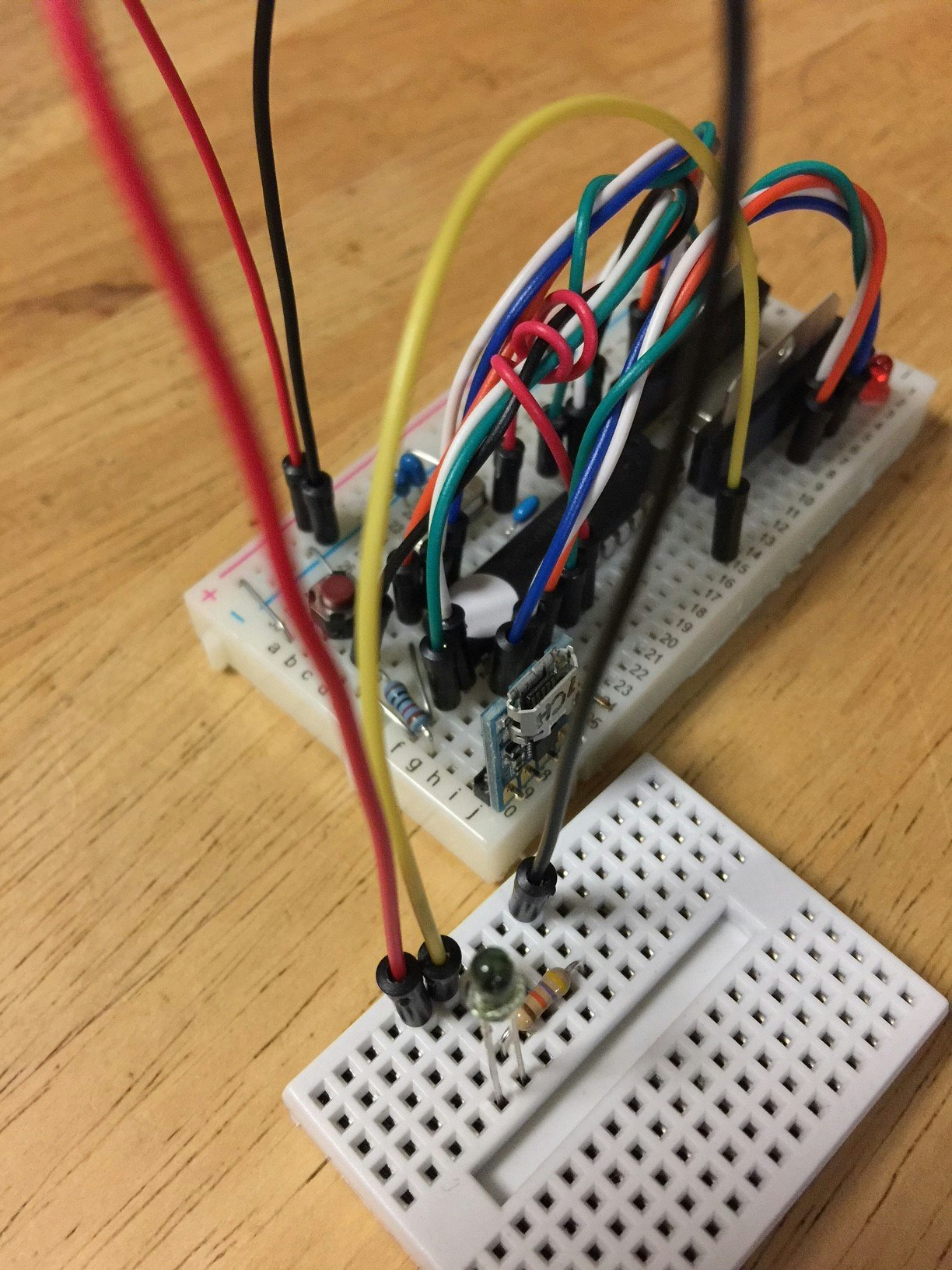
★あいかわらず、スモウルボットの電池ボックス、モーターなどがついていないことはご勘弁ください。
2.材料
スモウルボットが必要です。それ以外に
1.ミニブレッドボード(秋月さんのP-05155か類似品 130円ぐらい。ミニじゃなくてもOK) x1個
2.明度センサー(秋月さんのI-02325か類似品 2個入りで100円ぐらい) x1個
3.抵抗47kオーム(秋月さんのR-25473か類似品 100個入りで100円ぐらい) x1個
4.オスオスのジャンパーワイヤー(秋月さんのC-05159か類似品 60本入りで220円ぐらい) x3本
3.明度センサーの組み立て
机のまわりは片づけましょう。電子工作の部品はたいてい小さいので、自分は机の下に良く落として探します。
1.明度センサーをくぼみの近くに差し込みます。明度センサーの端子は2本あり、少し長い方に電源のプラスを接続しますので、どっちが長い方だったか覚えておきましょう。不要な線をニッパーでパッチンするときは、もとの長い方が分かるように少し長めに残しましょう。
2.明度センサーの端子の長い方に赤色のジャンパーワイヤーを繋ぎます。後でプラスに接続します。
3.テスターがあれば、抵抗が本当に47kオームか計測して確認します。
4.明度センサーの一つの端子に、抵抗を繋ぎます。
5.抵抗の左右に黒色のジャンパーワイヤーと黄色のジャンパーワイヤーを繋ぎます。
★説明のため、色を決めていますが好きな色でよいです。ただ、電源に接続するのはプラスは赤色、マイナス(GND)は黒色の方が通例というか感覚に合っていると思います。
★写真では、赤色(プラス)とスイッチが繋がっていないように見えますが、ブレッドボードの内部でつながっています。なので、写真では表面の赤色(プラス)が刺さっている個所からスイッチの間の3つの端子はどこも5Vの電気が流れます。
4.接続
組み立てた明度センサーをスモウルボットに接続します。
1.スモウルボットにUSBケーブルが繋がっていて、電源が供給されている場合はケーブルを抜いて、電源が供給されていない状態にします(安全第一)。
2.明度センサーの黄色のジャンパーワイヤーをスモウルボットのj15の位置に差し込みます。
3.スイッチの赤色と黒色の電源の線をスモウルボットの電源用のライン(赤と青の線が引いてある箇所の+/-)の列の空いているところに差し込みます。
5.スモウルビーでブロックの組み立て
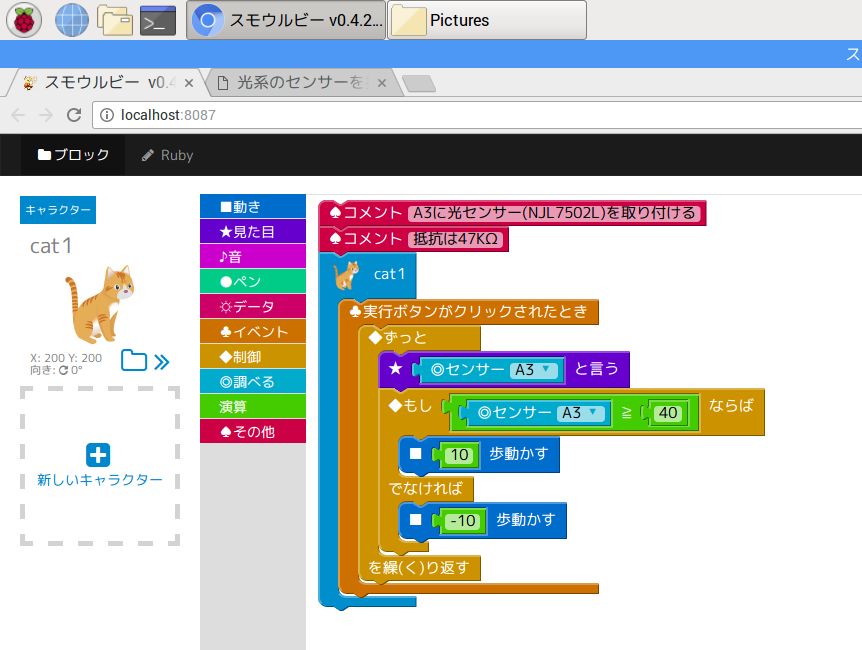
明度センサーから値を取得できていることを表示や動きとして知りたいので、ネコが動くようにブロックを組み立てます。
うまくいけば、明るければ前進、暗ければ後退するはずです。
部屋の明るさによって、前後する感度(ブロックの40のところ)を調整してください。
なお、最初のコメントは動作に影響ありませんので不要です。
1.ログインして、スモウルボットの制御をするためのブロックが使えるように準備します。
2.右上の[メニュー]-[設定]を選択して[スモウルボットV3のブロックを使う]と[ハードウェアブロックを使う]にチェックを付け、[決めた]ボタンをクリックします。
3.ポイントは、[センサー[A3]]というブロックを組み込むことです。
4.ブロックが組み立てられたら、スモウルボットとパソコンをUSBケーブルで接続します。
5.[実行]ボタンをクリックしてプログラムを実行します。
6.明度センサーへ光が当たっているとネコが進んで、光をさえぎるとネコが後退すればOK。
6.うまくいかない時
次のことを確認してみましょう。
1.スイッチの配線は、赤色(プラス)からたどると黒色(マイナス)までつながっている?
2.スイッチの配線は、赤色(プラス)からたどると黄色(信号)までつながっている?
3.スモウルボットに接続した黄色の線がj15(か、i15,h15,g15)につながっている?
4.電源の赤色(プラス)と黒色(マイナス)の線が合っている?
7.スモウルビーについて
スモウルビーは、
NPO法人Rubyプログラミング少年団
http://smalruby.jp/
で開発されています。無料で利用できます。
ブロックの組み立てでプログラムができます。