カラー化とスピードアップ
[その1]では元ネタに従い、Arduinoにカメラをつなぐのはうまくいったので、もっと機能を改善する。
何をするか
(1)カラー化
元ネタはモノクロなのでこれをカラー化する事により、表現力が向上する。
(2)画像表示の高速化
画像表示速度を早くする事により、移動する画像に多少強くなる。
1.カラー化
カラー画像を撮影するためにカメラの画像フォーマットをRGB565に変更する。
データが2バイト/1ピクセルと2倍になるので、PCLKの変化毎にデータを送信する。
データを送り切れなくなるので、PCLKを半分に遅くする。
※ov7670レジスタ(0x11)でXCLKとPCLKの分周比を設定
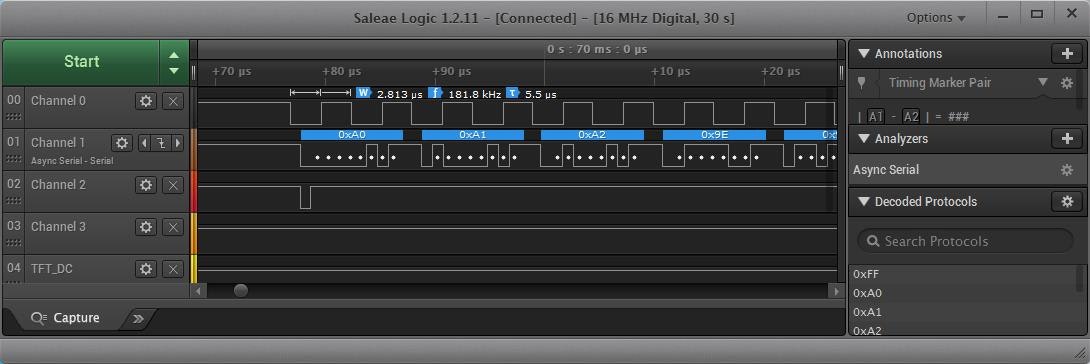
モノクロ時
PCLKを5.5uとし2クロック毎に送信
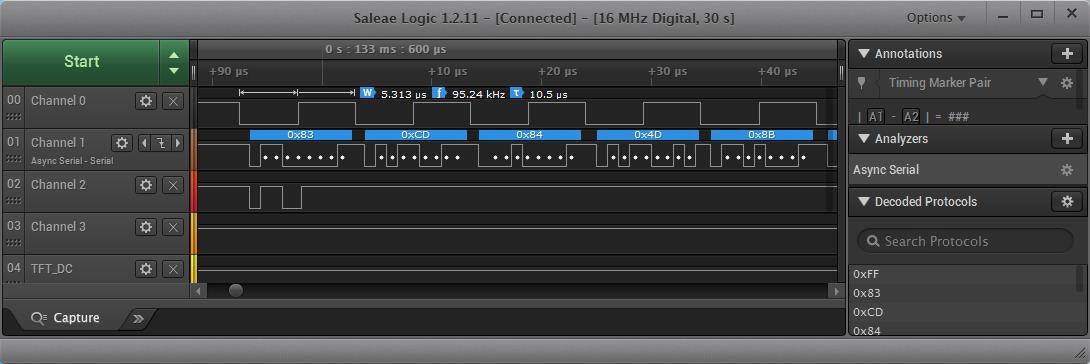
カラー時
PCLKを10.5uとし1クロック毎に送信
画像の例
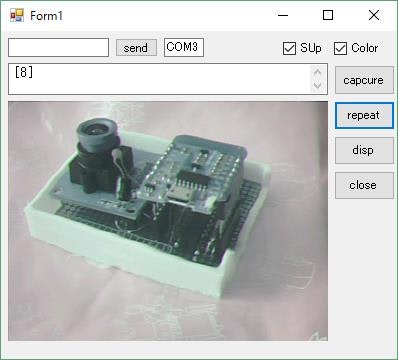
カメラの初期化はネットの設定例を参考にしたが、改善の余地があるような
2.画像表示の高速化
画像の表示速度はシリアル通信の速度で抑えられており、シリアルの高速化が必要であり、この方法として次の2点を検討。
(1)通信速度アップ
最大2Mbps迄UP可能だが、当方の環境では2Mbpsに設定するとデータの取りこぼしが発生した。
ノイズに起因しているように思われるが、解決に時間がかかりそうなので、この方法は却下。
(2)空き時間をつめる
PCLKの波形を俯瞰して見ると、一行分のデータと次の画像データとの間隔がかなり空いている事が判る。
これは、OV7670をQVGAに設定すると、必要な画像は一行おきに発生するが、データの発生間隔は変わらない為である。
そこで空き時間に伝送する方法を考えた。
常套手段としてはリングバッファが考えられるが、arduino(16M)では処理能力が足りず、処理落ちが発生した。
そこで、1バイト目はデータの直接送信を、2バイト目はバッファリングする事により、2倍のPCLKでも周期内での送信処理が可能となった。
バッファリングしたデータは空き時間に送信する。
また、これにより送信データはシーケンシャルにならないが、これは表示ソフトで並び替える事にした。
表示ソフトの説明
[その2 画像の表示]
これにより通信速度は約2倍となり、モノクロでは約1秒(1.1s)で画像の更新が可能となった。
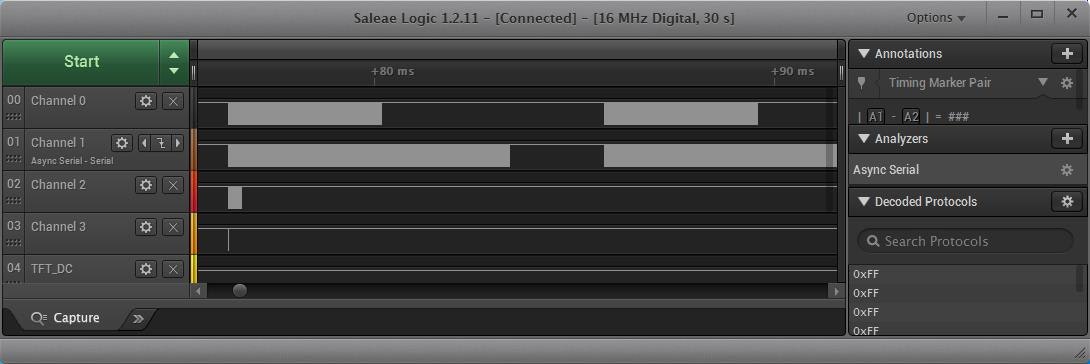
PCLKと同期して送信
(CH0.PCLK CH1.シリアル送信)
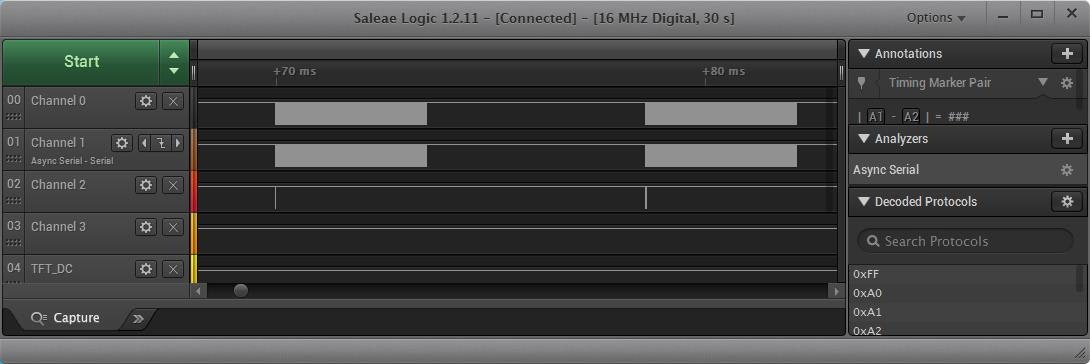
バッファリングして、空き時間にも送信
「uno_ov7670.ino」ver1.1
// Source code for application to transmit image from ov7670 to PC via USB
// By Siarhei Charkes in 2015
// http://privateblog.info
# include <stdint.h>
# include <avr/io.h>
# include <util/twi.h>
# include <util/delay.h>
# include <avr/pgmspace.h>
# define camAddr_WR 0x42
# define camAddr_RD 0x43
# define REG_COM7 0x12
# define REG_COM10 0x15 // Control 10 //
# define REG_COM14 0x3e // Control 14 //
# define REG_COM15 0x40 // Control 15 //
uint8_t cammd0=0, cammd1=0;
struct regval_list{ uint8_t reg_num; uint16_t value; };
const struct regval_list ov7670_default_regs[] PROGMEM = {
{0x3a,0x04},{0x40,0xd0},{0x12,0x14},{0x32,0x80},{0x17,0x16},{0x18,0x04},{0x19,0x02},{0x1a,0x7b},
{0x03,0x06},{0x0c,0x00},{0x3e,0x00},{0x70,0x00},{0x71,0x00},{0x72,0x11},{0x73,0x00},{0xa2,0x02},
{0x11,0x81},{0x7a,0x20},{0x7b,0x1c},{0x7c,0x28},{0x7d,0x3c},{0x7e,0x55},{0x7f,0x68},{0x80,0x76},
{0x81,0x80},{0x82,0x88},{0x83,0x8f},{0x84,0x96},{0x85,0xa3},{0x86,0xaf},{0x87,0xc4},{0x88,0xd7},
{0x89,0xe8},{0x13,0xe0},{0x00,0x00},{0x10,0x00},{0x0d,0x00},{0x14,0x28},{0xa5,0x05},{0xab,0x07},
{0x24,0x75},{0x25,0x63},{0x26,0xA5},{0x9f,0x78},{0xa0,0x68},{0xa1,0x03},{0xa6,0xdf},{0xa7,0xdf},
{0xa8,0xf0},{0xa9,0x90},{0xaa,0x94},{0x13,0xe5},{0x0e,0x61},{0x0f,0x4b},{0x16,0x02},{0x1e,0x37}, //{0x1e,0x17}
{0x21,0x02},{0x22,0x91},{0x29,0x07},{0x33,0x0b},{0x35,0x0b},{0x37,0x1d},{0x38,0x71},{0x39,0x2a},
{0x3c,0x78},{0x4d,0x40},{0x4e,0x20},{0x69,0x00},{0x6b,0x00},{0x74,0x19},{0x8d,0x4f},{0x8e,0x00},
{0x8f,0x00},{0x90,0x00},{0x91,0x00},{0x92,0x00},{0x96,0x00},{0x9a,0x80},{0xb0,0x84},{0xb1,0x0c},
{0xb2,0x0e},{0xb3,0x82},{0xb8,0x0a},{0x43,0x14},{0x44,0xf0},{0x45,0x34},{0x46,0x58},{0x47,0x28},
{0x48,0x3a},{0x59,0x88},{0x5a,0x88},{0x5b,0x44},{0x5c,0x67},{0x5d,0x49},{0x5e,0x0e},{0x64,0x04},
{0x65,0x20},{0x66,0x05},{0x94,0x04},{0x95,0x08},{0x6c,0x0a},{0x6d,0x55},{0x6e,0x11},{0x6f,0x9f},
{0x6a,0x40},{0x01,0x40},{0x02,0x40},{0x13,0xe7},{0x15,0x02},{0x4f,0x80},{0x50,0x80},{0x51,0x00},
{0x52,0x22},{0x53,0x5e},{0x54,0x80},{0x58,0x9e},{0x41,0x08},{0x3f,0x00},{0x75,0x05},{0x76,0xe1},
{0x4c,0x00},{0x77,0x01},{0x3d,0xc2},{0x4b,0x09},{0xc9,0x60},{0x41,0x38},{0x56,0x40},{0x34,0x11},
{0x3b,0x02},{0xa4,0x89},{0x96,0x00},{0x97,0x30},{0x98,0x20},{0x99,0x30},{0x9a,0x84},{0x9b,0x29},
{0x9c,0x03},{0x9d,0x4c},{0x9e,0x3f},{0x78,0x04},{0x79,0x01},{0xc8,0xf0},{0x79,0x0f},{0xc8,0x00},
{0x79,0x10},{0xc8,0x7e},{0x79,0x0a},{0xc8,0x80},{0x79,0x0b},{0xc8,0x01},{0x79,0x0c},{0xc8,0x0f},
{0x79,0x0d},{0xc8,0x20},{0x79,0x09},{0xc8,0x80},{0x79,0x02},{0xc8,0xc0},{0x79,0x03},{0xc8,0x40},
{0x79,0x05},{0xc8,0x30},{0x79,0x26},{0x09,0x03},{0x3b,0x42},{0xff,0xff},
};
void error_led(void){
DDRB |= 32;//make sure led is output
while (1){//wait for reset
PORTB ^= 32;// toggle led
_delay_ms(100);
}
}
void twiStart(void){
TWCR = _BV(TWINT) | _BV(TWSTA) | _BV(TWEN);//send start
while (!(TWCR & (1 << TWINT)));//wait for start to be transmitted
if ((TWSR & 0xF8) != TW_START)
error_led();
}
void twiWriteByte(uint8_t DATA, uint8_t type){
TWDR = DATA;
TWCR = _BV(TWINT) | _BV(TWEN);
while (!(TWCR & (1 << TWINT))) {}
if ((TWSR & 0xF8) != type)
error_led();
}
void twiAddr(uint8_t addr, uint8_t typeTWI){
TWDR = addr;//send address
TWCR = _BV(TWINT) | _BV(TWEN); /* clear interrupt to start transmission */
while ((TWCR & _BV(TWINT)) == 0); /* wait for transmission */
if ((TWSR & 0xF8) != typeTWI)
error_led();
}
void wrReg(uint8_t reg, uint8_t dat){
//send start condition
twiStart();
twiAddr(camAddr_WR, TW_MT_SLA_ACK);
twiWriteByte(reg, TW_MT_DATA_ACK);
twiWriteByte(dat, TW_MT_DATA_ACK);
TWCR = (1 << TWINT) | (1 << TWEN) | (1 << TWSTO);//send stop
_delay_ms(1);
}
static uint8_t twiRd(uint8_t nack){
if (nack){
TWCR = _BV(TWINT) | _BV(TWEN);
while ((TWCR & _BV(TWINT)) == 0); /* wait for transmission */
if ((TWSR & 0xF8) != TW_MR_DATA_NACK)
error_led();
return TWDR;
}
else{
TWCR = _BV(TWINT) | _BV(TWEN) | _BV(TWEA);
while ((TWCR & _BV(TWINT)) == 0); /* wait for transmission */
if ((TWSR & 0xF8) != TW_MR_DATA_ACK)
error_led();
return TWDR;
}
}
uint8_t rdReg(uint8_t reg){
uint8_t dat;
twiStart();
twiAddr(camAddr_WR, TW_MT_SLA_ACK);
twiWriteByte(reg, TW_MT_DATA_ACK);
TWCR = (1 << TWINT) | (1 << TWEN) | (1 << TWSTO);//send stop
_delay_ms(1);
twiStart();
twiAddr(camAddr_RD, TW_MR_SLA_ACK);
dat = twiRd(1);
TWCR = (1 << TWINT) | (1 << TWEN) | (1 << TWSTO);//send stop
_delay_ms(1);
return dat;
}
void wrSensorRegs8_8(const struct regval_list reglist[]){
uint8_t reg_addr, reg_val;
const struct regval_list *next = reglist;
while ((reg_addr != 0xff) | (reg_val != 0xff)){
reg_addr = pgm_read_byte(&next->reg_num);
reg_val = pgm_read_byte(&next->value);
wrReg(reg_addr, reg_val);
next++;
}
}
void arduinoUnoInut(void) {
//cli();//disable interrupts
/* Setup the 8mhz PWM clock * This will be on pin 11*/
DDRB |= (1 << 3);//pin 11
ASSR &= ~(_BV(EXCLK) | _BV(AS2));
TCCR2A = (1 << COM2A0) | (1 << WGM21) | (1 << WGM20);
TCCR2B = (1 << WGM22) | (1 << CS20);
OCR2A = 0;//(F_CPU)/(2*(X+1))
DDRC &= ~15;//low d0-d3 camera
DDRD &= ~252;//d7-d4 and interrupt pins
//set up twi for 100khz
TWSR &= ~3;//disable prescaler for TWI
TWBR = 72;//set to 100khz
//enable serial
UBRR0H = 0;
UBRR0L = 1; // 0 = 2M baud rate. 1 = 1M baud. 3 = 0.5M. 7 = 250k 207 is 9600 baud rate.
UCSR0A |= 2;//double speed aysnc
UCSR0B = (1 << RXEN0) | (1 << TXEN0);//Enable receiver and transmitter
UCSR0C = 6;//async 1 stop bit 8bit char no parity bits
}
void camInit(void){
wrReg(0x12, 0x80); delay(100);
wrSensorRegs8_8(ov7670_default_regs);
wrReg(REG_COM10, 32);//PCLK does not toggle on HBLANK.
wrReg(0x70, 0x3a); wrReg(0x71, 0x35); wrReg(0x72, 0x11); wrReg(0x73, 0xf1);
wrReg(0x0c, 0x04); wrReg(0x3e, 0x19); wrReg(0xa2, 0x02);
wrReg(0x13, 0x8f); //
//wrReg(0x71, 0xB5); // color bar
}
void cammode_select(){
int clksp;
if(cammd1) clksp = 6;
else clksp = 11;
if(cammd0){
wrReg(REG_COM7 , 0x14); wrReg(REG_COM15, 0xd0); // RGB565
wrReg(0x11, clksp*2-1); // Coloe Mode & Slow Speed
} else {
wrReg(REG_COM7 , 0x10); wrReg(REG_COM15, 0xc0); // YUYV
wrReg(0x11, clksp-1); //Earlier it had the value: wrReg(0x11, 12); New version works better for me :) !!!!
}
}
uint8_t imgbf[320];
static void captureImg(uint8_t rm0, uint8_t rm1, uint16_t wg, uint16_t hg){
uint16_t y, x;
uint8_t *imgwp,*imgrp;
while (!(PIND & 8));//wait for high
while ((PIND & 8));//wait for low
UDR0 = 0xff; // Start Mark
cli();
y = hg;
do{
x = wg / 2;
imgwp = &imgbf[0]; imgrp = &imgbf[0];
do{
while (!(PIND & 4)); while ((PIND & 4)); // Falling edge
UDR0 = (PINC & 15) | (PIND & 240);
while (!(PIND & 4)); while ((PIND & 4)); // Falling edge
if(rm0)
if(rm1) *imgwp++ = (PINC & 15) | (PIND & 240);
else UDR0 = (PINC & 15) | (PIND & 240);
while (!(PIND & 4)); while ((PIND & 4)); // Falling edge
if(rm0 || !rm1) UDR0 = (PINC & 15) | (PIND & 240);
else *imgwp++ = (PINC & 15) | (PIND & 240);
while (!(PIND & 4)); while ((PIND & 4)); // Falling edge
if(rm0)
if(rm1) *imgwp++ = (PINC & 15) | (PIND & 240);
else UDR0 = (PINC & 15) | (PIND & 240);
} while (--x);
while(imgrp!=imgwp) {
if (UCSR0A & _BV(UDRE0)) UDR0 = *imgrp++;
}
} while (--y);
for( x=0; x<8; x++){ // End Mark
while (!(UCSR0A & (1 << UDRE0)));//wait for byte to transmit
UDR0 = 0;
}
sei();
//_delay_ms(100);
}
void wrOV7670Reg(unsigned char adr, unsigned char dat){
wrReg( adr, dat);
}
void setup(){
arduinoUnoInut();
camInit();
cammode_select();
}
int s22hex(char * ha){
int rc = 0,hi;
for(int i=0; i<2; i++){
char ch = *ha++;
if(ch>'9') hi = (ch & 0xdf)-0x37; else hi = ch-0x30;
rc = rc*16+hi;
}
return rc;
}
int rct = 0,repf = 0;
char rbf[16];
byte inChar = 0;
char * rbfp;
void docmd(){
inChar = ' ';
if(UCSR0A & (1<<RXC0)){
byte kd = UDR0;
if(kd>=0x20) { rbf[rct++] = kd; return;
} else {
if(kd==0x08 && rct!=0) { rct--; return; }
else{ rbf[rct] = 0; inChar = rbf[0]; rbfp = &rbf[2]; rct = 0;}
}
} else if(repf==1) inChar = 'c';
if (inChar == 'c') {
if(rbf[1]==0){
captureImg(cammd0,cammd1, 320, 240);
} else {
//camcolor = rbf[1];
if((rbf[1] & 1)!=0) cammd0 = 1; else cammd0 = 0;
if((rbf[1] & 2)!=0) cammd1 = 1; else cammd1 = 0;
cammode_select();
}
}
if (inChar == 'r') repf = 1-repf;
if (inChar == 's') { // Setup ov7670 Regs
byte adr = s22hex(&rbf[1]);
byte dat = s22hex(&rbf[3]);
if(adr==0xff) setup();
else wrReg( adr, dat);
}
}
void loop(){
docmd();
}
その他
上記記載のハード、ソフトは無保証であり、各自の責任においてご利用願います。