大学時代の友人たちと定期的に開催している"各々興味のあること"を調べて発表する『第4回 誰も知らなさそうなこと学会』で発表した内容をまとめておく。
1. イントロダクション
1-1. 地図を作りたい
多くの人にとって地図は検索対象であり、旅先の情報/目的地への経路/地形や標高といった情報を調べるものだが、人によっては”地図を作りたい”という時もあるのではないだろうか。
(例)
・訪問先/移動経路の記録をしたい
・Blog/Vlogに地図を載せたい
・自分で作成した経路を伝えたい ほか
今回、こうした「自分で地図を作りたい」という希望をGoogle Colaboratory上で実現するコード(スクリプト)をいくつか掲載する。
2. 地図描画ライブラリ
2-1. OpenStreetMap / Leaflet / Folium
今回使用する地図描画ライブラリ/WEBサービスは主に三つ。
2-1-1. OpenStreetMap
・ユーザーが無料でアクセスできるオープンソースの地図データベースおよび地図描画プロジェクト
・クレジットの明記により、データを自由にコピー/配布/送信/改変することが可能
・類似のサービスとして「Googleマップ」「地理院地図」が挙げられる
2-1-2. Leaflet
・対話型のオープンソース JavaScript 地図ライブラリ
・主要なデスクトップおよびモバイル プラットフォームで動作。拡張性◎
2-1-3. Folium
・Leaflet.jsをPythonライブラリ化したもの
・Pythonで簡易的にマップを用いてデータの可視化が可能
・類似のサービスとして「leafmap」
2-2. 三つの地図描画ライブラリ/サービスの関係性
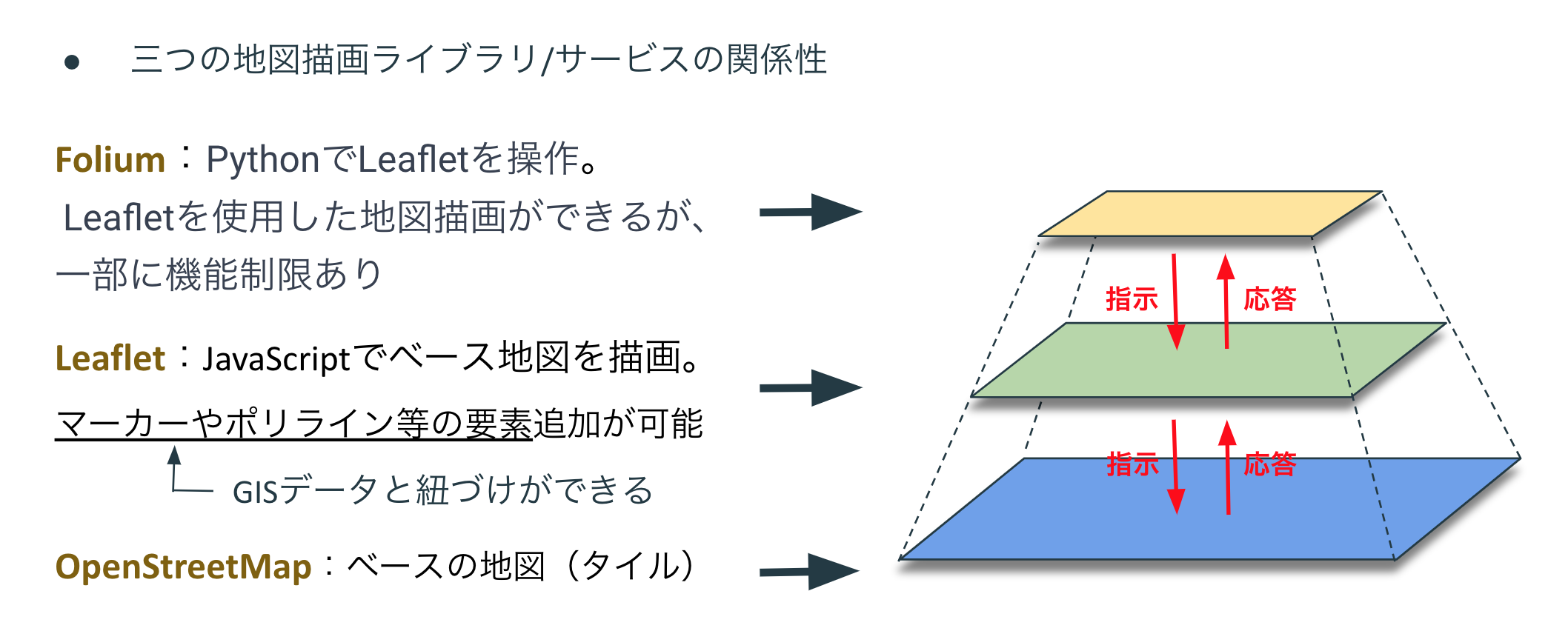
2-1. で紹介した三つの地図描画ライブラリ/サービスの関係性を簡単にまとめたものが上図になる。
まず最下層のベースの地図(タイル)として機能するのがOpenStreetMap。
その上層でLeafletが動作し、JavaScriptでベース地図を描画する。この際、マーカーやポリライン等の要素追加が可能であり、これらの要素についてはGISデータと紐づけることもできる。
最上層に位置するのがFolium。Foliumは、PythonでのLeaflet操作、地図描画を可能とするライブラリだが、その機能には一部に制限がある。
3. 私の体当たり型プログラミング勉強法
記事の本題からは外れるが、ここで『私の体当たり型プログラミング勉強法』について記載する。
私は普段非IT系の仕事をしており、学生時代も特段プログラミングを専攻したことはないため、プログラミングの知識はほとんど0といって差し支えない。
知識の無い自分がコードを記述する際お世話になるのがChatGPTだ。
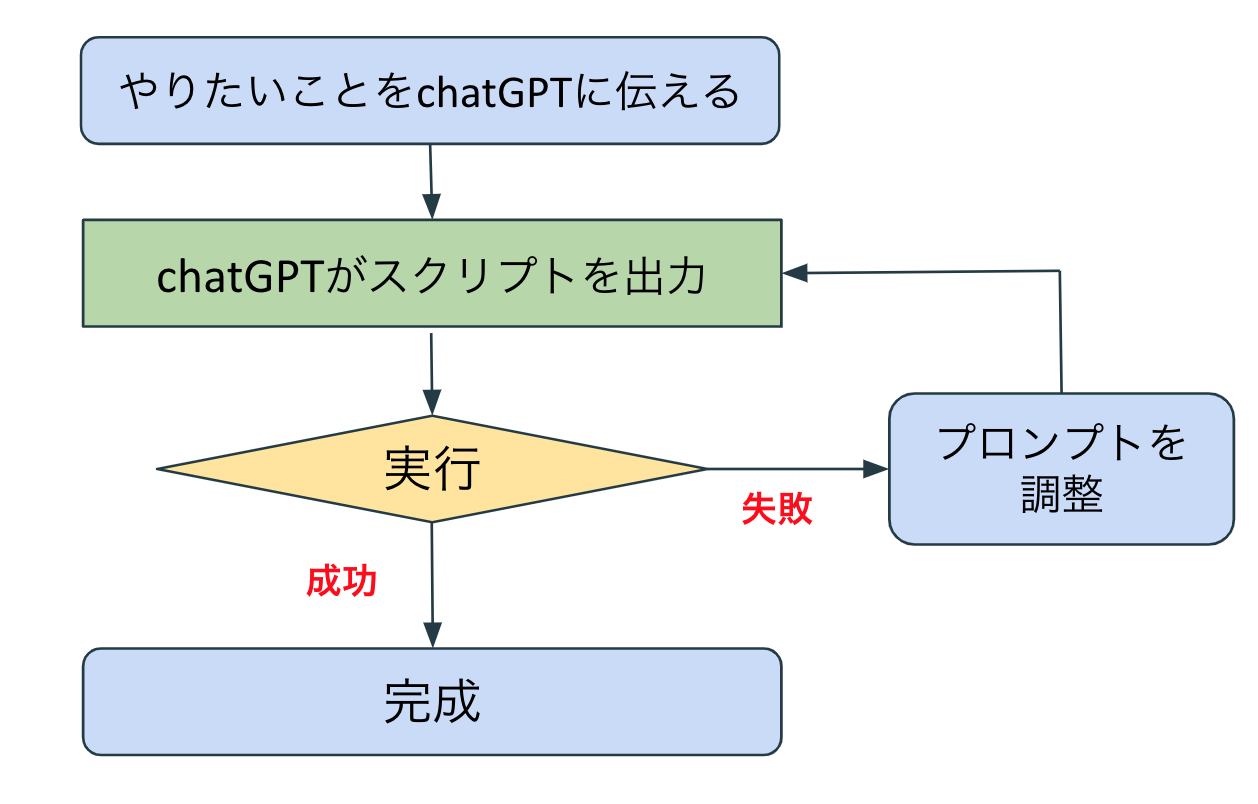
上記が目的のスクリプトはChatGPTと協働して作成していく際のフローチャートである。
基本的にはChatGPTに対して「○○をするコードを書いて」と指示し、その結果をGoogle Colaboratoryにコピペして実行、上手くいくまでChatGPTとのやり取りを繰り返す、という方針でコードを作成している。
実行が失敗するときはエラー文をChatGPTのプロンプトに入力するだけで修正版のコードを再出力してくれる。非常に便利だ。
今回の発表では、五つのスクリプトを作成、さらにその背景知識等もChatGPTで調べた結果、ChatGPTとのやり取り回数は軽く500回を超えた。
ChatGPTとのやり取りでは、以下のことに気を付けた。
・抽象的な指示で望んだ回答を得られない場合、具体的な指示に切り換える。
...簡単な例を与える等が有効。
・ChatGPTから”未知の専門用語”を引き出し、その語句を梃子にして自力での調査やプロンプト入力を行う
...今回の地図描写コード作成では「球面三角法」や「ポリライン」といった語句がキーワードになった。
・5回出力に失敗したら、プロンプト作成の方針を変更する
...5回出力に失敗するときは、ChatGPTも指示者も袋小路に入り込んでいる可能性が高い。望ましい結果を得るためのアプローチ自体を考え直すのが得策。
4. 目標と成果品
今回は以下の五つの地図描画スクリプトを作成した。
1-i.マップ上にピンを立てる
2-i.フライトマップ風の地図(静止画)
2-a.フライトマップ風の地図(マップアニメーション)
3-i.東海道新幹線のルートマップ(静止画)
3-a.東海道新幹線のルートマップ(マップアニメーション)
記事を分けつつ、上記の五つのスクリプトを紹介する。
4-1-i.マップ上にピンを立てる
Googleマップでも、地理院地図でも、利用者の多くが使いたいと思うことが多いであろうこの機能(その割に直感的な操作ができないような印象がある)。
以下がFoliumを用いてOSM上にマーカーを立てるスクリプト。
import folium
# Dallasの緯度経度情報
dallas_lat = 32.7767
dallas_lon = -96.7970
# 地図を作成(tilesを指定)
m = folium.Map(location=[dallas_lat, dallas_lon], zoom_start=10)
# m = folium.Map(location=[dallas_lat, dallas_lon], zoom_start=10, tiles='Stamen Terrain')
# マーカーを追加(ポップアップに'Dallas, TX'と入れる)
folium.Marker([dallas_lat, dallas_lon], popup='Dallas, TX').add_to(m)
# 地図を表示
m
# 地図をHTMLファイルとして保存
# m.save("dallas_map.html")
gistはこちら → gist:map_marker.py
実行結果のスクリーンショットは以下の通り。
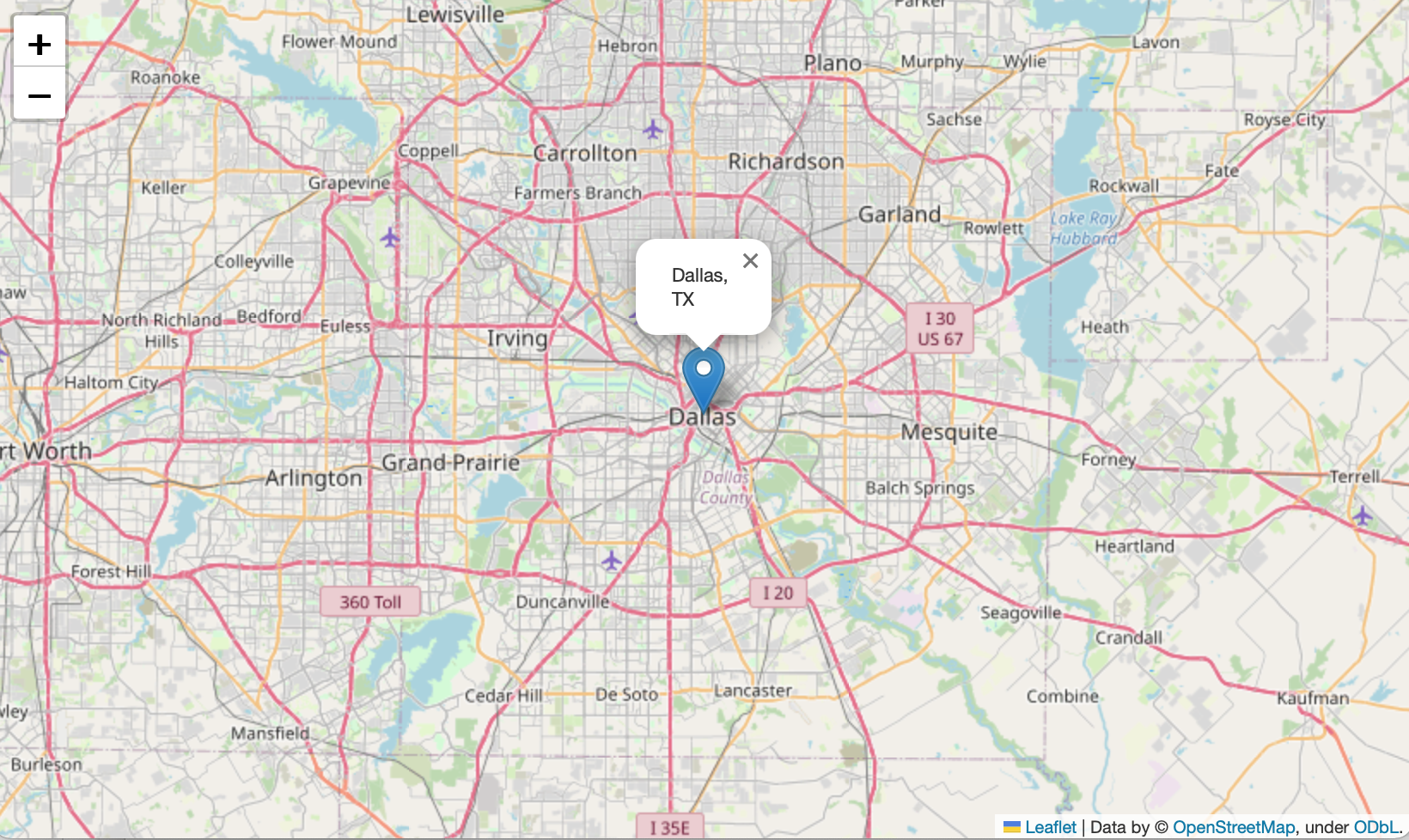
マーカーを立てる地点の緯度経度を指定すれば地図にマーカーを立てられる。
マーカーにポップアップで語句を表示することもできる。
4-2-i. フライトマップ風の地図を描く
フライトマップ風に“指定した2点間を地球が球体なことを考慮し最短経路で結ぶ”地図(静止画)を描くスクリプト。
「Jetlovers」に着想を得て作成。実際の飛行ルートと一致する訳ではないことに留意。
import folium
import numpy as np
#指定した2点間を球体である地球を考慮し最短経路で結ぶスクリプト(日付変更線を横切る)
# 球面三角法を使用して大円を計算する関数
def great_circle_points(point1, point2, num_points):
lat1, lon1 = np.radians(point1)
lat2, lon2 = np.radians(point2)
# 球面三角法による角度(ラジアン)を計算
angles = np.linspace(0, 1, num_points)
distance = np.arccos(np.sin(lat1) * np.sin(lat2) + np.cos(lat1) * np.cos(lat2) * np.cos(lon2 - lon1)) # 球面三角法の余弦定理の式変形(2点と北極点の3点を結んだ球面三角形を考える)
# 大円上の各点の緯度経度を計算
points = []
for angle in angles:
x = np.sin((1 - angle) * distance) / np.sin(distance) * np.cos(lat1) * np.cos(lon1) + np.sin(angle * distance) / np.sin(distance) * np.cos(lat2) * np.cos(lon2)
y = np.sin((1 - angle) * distance) / np.sin(distance) * np.cos(lat1) * np.sin(lon1) + np.sin(angle * distance) / np.sin(distance) * np.cos(lat2) * np.sin(lon2)
z = np.sin((1 - angle) * distance) / np.sin(distance) * np.sin(lat1) + np.sin(angle * distance) / np.sin(distance) * np.sin(lat2)
lat = np.arctan2(z, np.sqrt(x ** 2 + y ** 2))
lon = np.arctan2(y, x)
# 経路を180度の子午線を横切るように修正
if lon - lon1 < -np.pi:
lon += 2 * np.pi
elif lon - lon1 > np.pi:
lon -= 2 * np.pi
points.append((np.degrees(lat), np.degrees(lon)))
return points
# 羽田空港の緯度経度
haneda_lat = 35.5533 # haneda_lat = 33.4484(Phoenixの緯度)
haneda_lon = 139.7811 # haneda_lon = -112.0740(Phoenixの経度)
# Dallasの緯度経度
dallas_lat = 32.7767
dallas_lon = -96.7970
# 地図を作成
m = folium.Map(location=[haneda_lat, haneda_lon], zoom_start=3)
# 羽田空港にマーカーを追加
folium.Marker([haneda_lat, haneda_lon], popup='Haneda Airport, Tokyo').add_to(m)
# 大円上の点を計算
num_points = 100
great_circle = great_circle_points((haneda_lat, haneda_lon), (dallas_lat, dallas_lon), num_points)
# 大円を地図に追加
folium.PolyLine(locations=great_circle, color='blue').add_to(m)
# Dallasにマーカーを追加(修正後の位置に変更)
folium.Marker([great_circle[-1][0], great_circle[-1][1]], popup='Dallas, TX').add_to(m)
# 地図を表示
m
# 地図をHTMLファイルとして保存
# m.save("dallas_map.html")
gistはこちら → gist:map_flight.py
実行結果のスクリーンショットは以下の通り。
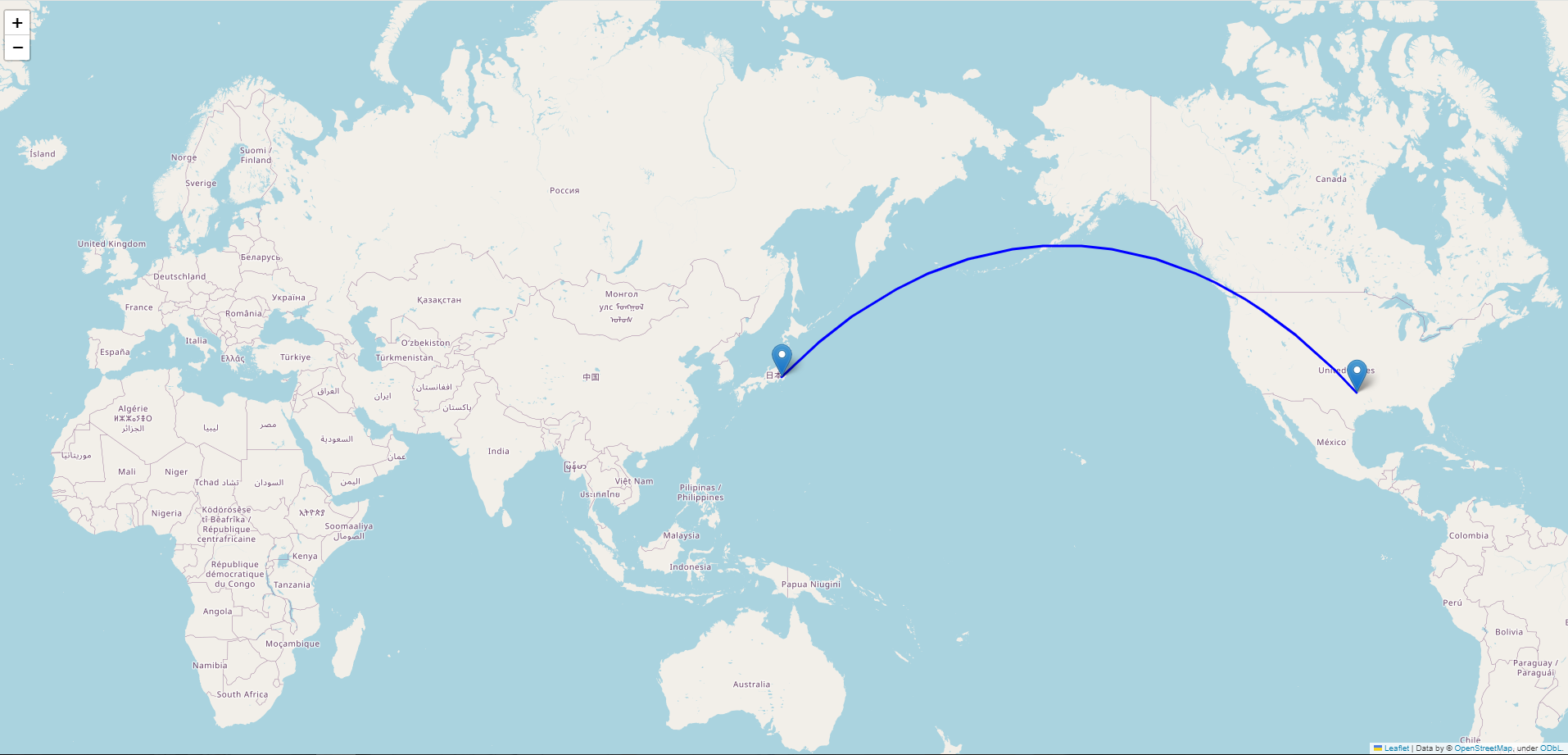
スクリプトの肝は下記☟の「球面三角法の余弦定理」を用いた2点間の距離(弧の長さ)計算だろう。

ここで求めた”distance”(2点間の距離)をもとに、中間点を指定個数算出、それらを結ぶことでルートマップを作成する。
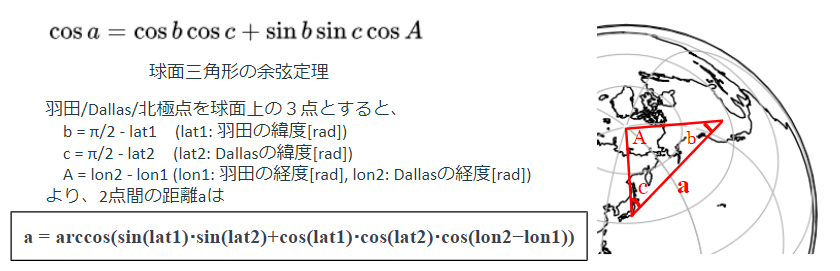
「球面三角法の余弦定理」ほか、球体上の2点間の距離を求める計算法については、このページの解説が詳しい。→ Calculate distance, bearing and more between Latitude/Longitude points
4-3. つづく
そのほかの成果については、別記事に譲る。
2-a.フライトマップ風の地図(マップアニメーション)
→ フライトマップ風の地図(マップアニメーション)をつくる
3-i.東海道新幹線のルートマップ(静止画)
3-a.東海道新幹線のルートマップ(マップアニメーション)
→ 東海道新幹線のルートマップを描く
5. 参考文献
・「GISファイルフォーマットの簡単なまとめ/地図のワークブック」
・Leaflet
・Leafletの使い方(埼玉大学教育学部人文地理学 谷謙二研究室)
・OpenStreetMap Japan
・folium 0.15.1
・foliumの基本的な使い方とオープンデータ活用
・Wikipedia「球面三角法」
・球面三角法の簡潔かつ体系的な理解への試み(国土地理院)
・2地点の距離の導出
・Wikipedia「ラジアン」
・緯度、経度って何だろう?(国土地理院)
・Jetlovers
・Calculate distance, bearing and more between Latitude/Longitude points
・Wikipedia「ランベルト正積方位図法」
・chatGPT 3.5