ドラにゃん?
Q氏: 引きこもりの人って普段何してんだろう?自宅警備隊は分かるけど。もしやばい奴が沢山攻めてきたら対応できないと考えて、防犯カメラとか警備ロボットを密かに作ってたりするのかな
A氏: きっとネットで色々勉強してるんだよ。何でも出来るドラ〇もんでも作ってるんじゃない?
Q氏: じゃぁわたしも電子工作セミナーに出て作ってみようかな
というわけで、引きこもって作れるネコ型ロボット「ドラにゃん」を電子工作セミナー用に作ったのでついでに公開してみます。 ↓かなり見た目ひどい写真ですが(笑)

改訂履歴
2020年5月31日 初版
2020年6月1日 タイトル変更、免責事項修正
免責事項
本記事は個人のメモとして記載しているため、記事の内容の正当性を保証するものではありません。本記事の内容の誤りにより問題が生じた場合でも一切責任を負いかねますのでご了承下さい。
但し、間違いやライセンス問題等ありましたらできる限り修正しますので、ページ最後の「編集リクエスト」でご依頼下さい。
仕様・完成型
4次元ポケットは無し。たいした機能も無いネコ型ロボット
- 日本語表示機能。離れた所からリモートで画面に日本語を表示
- 日本語発話機能。離れた所からリモートで日本語を喋らせる
- センサー機能。鼻を触るとニャーと鳴く
- モーターで動く機構。尻尾が動く
必要部材
- wifiルーター : スマホとの通信の際に使用します
- M5Stack Basic 又はgray : マイコンモジュール。小型ディスプレイやWi-Fiモジュールなど色々内蔵
- microSDカード16GB以下 : PCにてフォントデータ等(合計たったの10MB以下)を書き込み、M5stackに挿して使用します
- サーボ : 尻尾を動かすため。5V以下で動作する小型の物
- ジャンパーワイヤー数本 : 配線用
- タッチセンサー部材 : 銅箔テープorアルミホイルと金属製クリップ等
- ネコの外観部材 : 尻尾用ふわふわモール、外側を作るための樹脂ケース、段ボール、紙などお好みで
- スマホorPC : 本機を離れて操作するため。ブラウザがあればPCでもiOS端末でもandroid端末でもOK
- PC(開発環境) : Qiita読者でこれ持ってない人居るのだろうか・・・。
セットアップ
Arduinoのセットアップ
まずはこちらを参照し手持ちのPCにArduinoとM5Stackの環境を整えます。Windows、Mac共通です。英語ですが何か。
途中、For M5Core and M5Stick、For M5StickCと2択の説明が出てきますが、M5Coreの方を参照。
Macの方はこちらも参照されると良いかもしれません。「STEP 4: サンプルプログラムを動かしてみる」はしてもしなくてもOKです。
M5Stackで流れる日本語表示のセットアップ
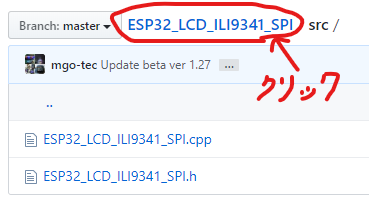
以下のリンク先の「SDカードへのフォントデータ書き込み」から、「HTML ヘッダファイルをSD カードへ書き込む」、それから「M5stack(ESP32)へのプログラム書き込み」の途中にある、ソースコードの入力の手前、arduinoIDEを再起動するまで、の手順を行います。
1カ所注意点があります。「ESP32_LCD_ILI9341_SPI-master.zip」のリンク先をクリックすると、.zipファイルのダウンロード階層ではなく1つ深い階層に飛ぶようリンクされていましたので.zipファイルのダウンロードボタンが表示されません。そのため下図赤枠部分をクリックし、一つ上の階層に戻ると.zipダウンロードできます。
以上で、microSDカードへフォントファイルを保存したりArduinoでそれを読み込んで日本語表示を実現するためのセットアップが出来ました。それとWi-FiでWebSocket 通信を行うための準備もしました。
AquesTalkで日本語発話のセットアップ
M5Stackには、ESP32という無線+マイコンモジュールが入っています。そのESP32で動く日本語発話システムがAquesTalkです。
以下のリンク先ページの、「AquesTalk pico for ESP32 (AquesTalk-ESP)の入手」と、「ビルド準備 ArduinoIDEの場合」の項の部分をPCにセットアップします。ここちょっとややこしいかもですね。万が一編集リクエストを沢山頂いたら詳しく書いてみるかもですが・・・。
無償の評価版の場合、記事の下の方に書かれている通り、ナ行とマ行がすべてヌと発声される制限があるそうです・・・。
ハードウェアのセットアップ
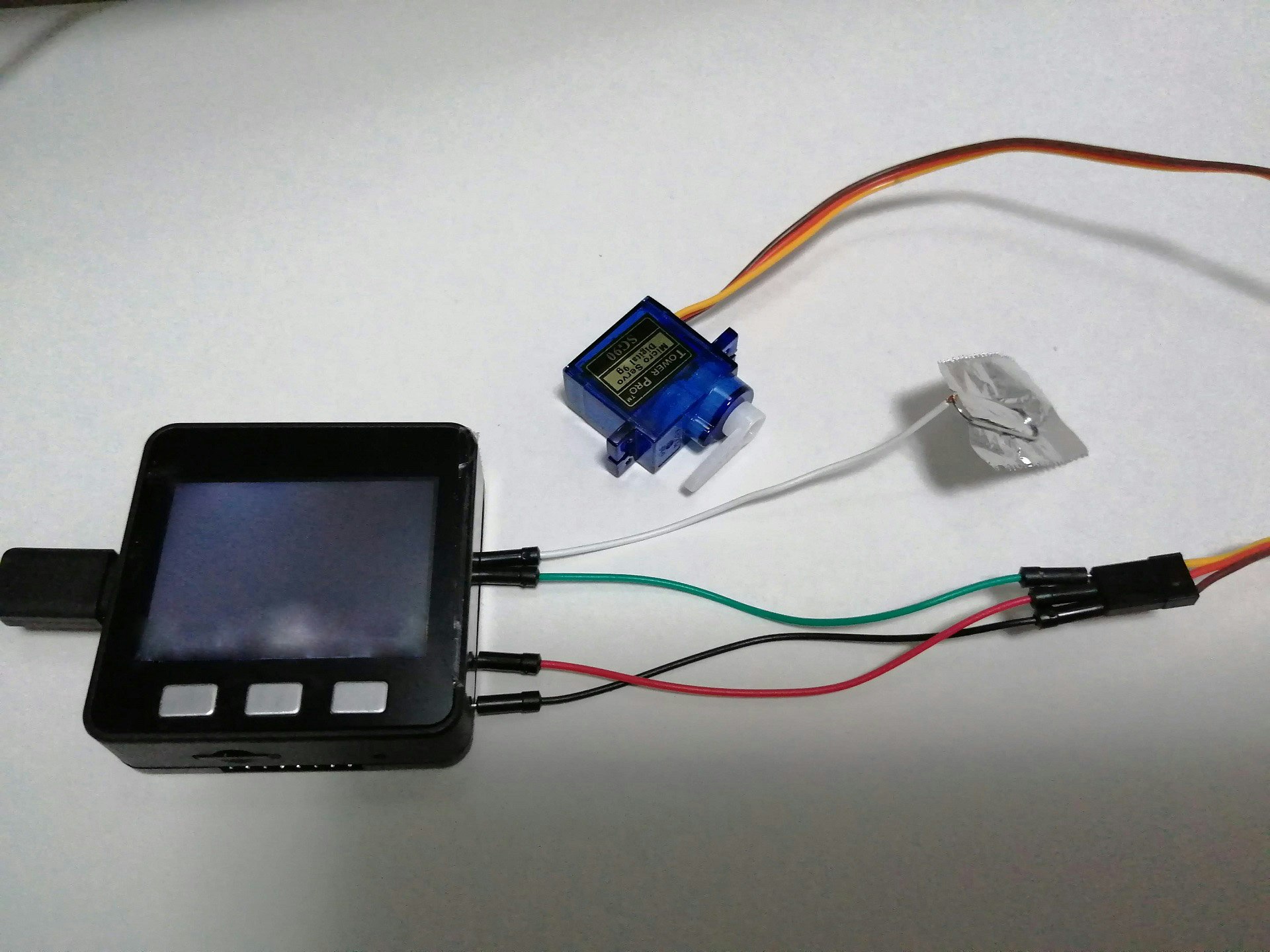
全体の配線
こんな感じで接続します。
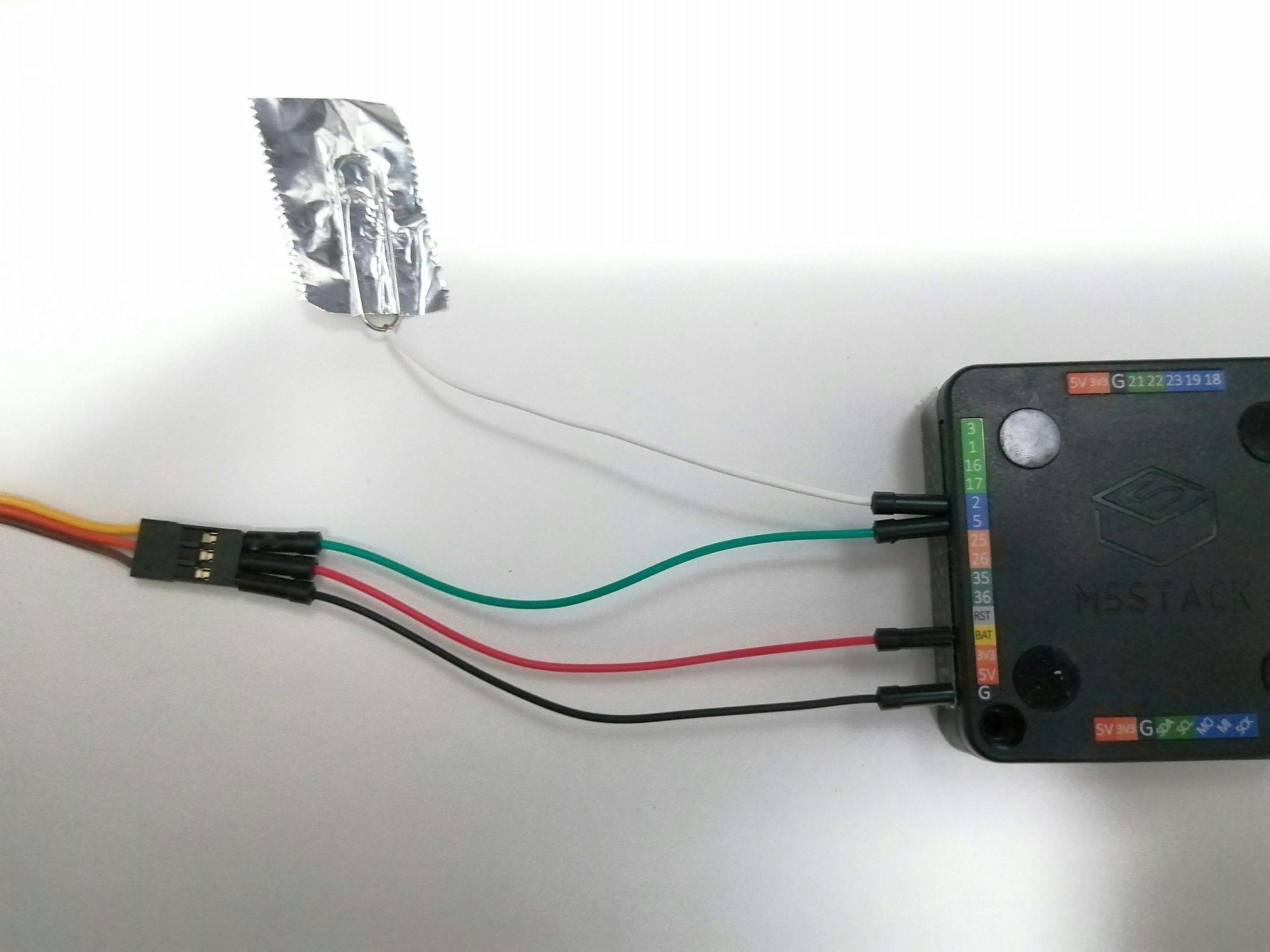
| M5stackの端子 | M5stack裏ラベル | 接続先 |
|---|---|---|
| GPIO2 | 2,青 | タッチセンサー用金属部 |
| GPIO5 | 5,青 | サーボのPWM端子(橙) |
| Battery | BAT,黄 | サーボのVcc端子(赤) |
| Ground | G,黒 | サーボのGround端子(茶) |
途中のジャンパーワイヤーは何色でも良いですが、色が色々ある人は基準電圧であるGroundは黒、電源であるBatteryは赤にするとわかりやすいです。
タッチセンサーは、ジャンパーワイヤーの片側端をニッパーで切って、被覆を剥き、金属製のクリップにくくりつけます。それを銅箔テープやアルミ箔等の金属に挟んで、電極として取付場所に付けやすいようにします。
これで、配線は完成です。
サーボの補足
サーボを駆動するコードは以下のリンク先を使わせて頂きました。
因みにPWMを出力する方法はanalogWrite()関数ではなく、細かく周波数を設定できるledcライブラリが使われています。
以下サーボとは?について。知りたい人だけ読んで下さい。
ラジコン(Radio Control)用のサーボモータ、通称サーボは、DCブラシ付きモータ+ギアの組み合わせに更に、エンコーダとフィードバック回路が1つのケースに入っています。「必要部材」項のサーボで、リンク先の秋月電子通商(通称秋月)等から購入できます。
普通のモータ+ギアでは、出力軸がどの角度になっているかは分かりませんよね。サーボの場合、電源とPWM(Pulse Width Modulation)信号を入れるだけで、出力軸の絶対位置を指定して動かすことが出来ます。フィードバック回路が入っていますので、軸を手で動かそうとすると、指定された位置に戻そうと制御が自動でかかるためラフな位置決めに便利です。
なお制御角(最大回転角度の幅)は90°や180°であったりとまちまちです。他にもトルク、速度、印加電圧等によって値段やサイズが異なります。
元々ラジコンのステアリングを操舵するものなのでそのような仕様になっているんですね。
Arduinoソースコード
それでは本題に入っていきたいと思います。
全体を動かすArduinoのコードですが、前記セットアップの項の各リンク先よりありがた~くコピペ&合体、一部追加修正しました。
ArduinoIDEを立ち上げ、「ファイル」>「新規ファイル」で空のスケッチを作り、初めから入力されている空のsetup()とloop()関数を全部消して、以下のソースコードをがさっとコピペ。
43行目のLEDC_BASEFREQの値は、サーボのPWMサイクル仕様に合わせて変更してください。ここに入力する値の単位はHzです。サーボの仕様が時間msで書かれていたらf=1/tで変換してください。例:20msの場合 1/0.02=50Hz となります。正しくないと、サーボがジリジリと音を立てて正常動作しません。同様に46,47行目もサーボの仕様に合わせて変更してください。
65、66行目のssidとパスワードは接続するルーターを参照し、「xxxxxxxxxxxxxx」の部分に上書きしてください。
「ファイル」 > 「名前を付けて保存」で、ファイル名をDoraNyan等として保存してください。
/* DoraNyan1.ino
* DoraNyan robot program for M5stack
* The MIT License (MIT)
* Copyright (c) 2020 haespo All rights reserved.
*
* M5Stack library - MIT License
* Copyright (c) 2017 M5Stack
* https://opensource.org/licenses/mit-license.php
* 引用:https://www.mgo-tec.com/blog-entry-m5stack-websocket-message-board-esp32.html/2
* 引用:http://blog-yama.a-quest.com/?eid=970188
*
*/
# include <M5Stack.h>
# include <Wire.h>
# include "ESP32_LCD_ILI9341_SPI.h" //beta ver 1.2-
# include "ESP32_Button_Switch.h"
# include "ESP32_SD_ShinonomeFNT.h" //beta ver 1.22-
# include "ESP32_SD_UTF8toSJIS.h" //beta ver 1.22-
# include "ESP32_SD_EasyWebSocket.h" //beta ver 1.60-
# include "driver/i2s.h"
# include "aquestalk.h"
// GPIO settings
# define PIN_M5SPK 25
# define PIN_M5SPKMUTE 13
# define PIN_TOUCH 2 // T0:gpio4,T1:0,T2:2,T3:15,T4:13,T5:12,T6:14,T7:27,T8:33,T9:32
# define PIN_SERVO 5 // same of LEDC_GPIOPIN GPIO #36~#39 は設定不可
// AquesTalk
# define LEN_FRAME 32
uint32_t workbuf[AQ_SIZE_WORKBUF];
char strbuff[64];
// touch sensor
# define TS_SOUND ("nya'-o")
# define TS_INITCNTNUM 16 // the number of initial meas data for desision threshold
# define TS_INITAVGNUM 4 // the number of data to average for desision threshold
# define TS_THSRATIO (0.93) // threshold ratio of the touch sensitivity
boolean f_touchdet = false; // flug true:detected(touched), false:no det(untouched)
int touch_ths = 0; // touch threshold level
// Moving Tail by servo of pwm driving by ledc
# define LEDC_CH 3 //channel max 15, Noise occurs from SP when using ch0
# define LEDC_BASEFREQ 50.0 // in hz
# define LEDC_TIMBIT 16 //max 16bit, 8bitの場合、最大周波数 312500Hz
# define LEDC_GPIOPIN (PIN_SERVO) //GPIO #36~#39 は設定不可
# define SERVO_MIN_WIDTH_MS 0.6 // in ms
# define SERVO_MAX_WIDTH_MS 2.4 // in ms
# define TAILPOS_ON 89
# define TAILPOS_OFF (-89)
# define TAILMOVETIME 2000 // tail moving time
boolean f_tail = false; // tail position
// TIME
unsigned long time_tailmove; // count time
// Wi-FI
const int8_t sck = 18; // SPI clock pin
const int8_t miso = -1; // MISO(master input slave output) don't using
const int8_t mosi = 23; // MOSI(master output slave input) pin
const int8_t cs = 14; // Chip Select pin
const int8_t dc = 27; // Data/Command pin
const int8_t rst = 33; // Reset pin
const int8_t LCD_LEDpin = 32;
const uint8_t CS_SD = 4; //SD card CS ( Chip Select )
const char* ssid = "xxxxxxxxxxxxxx"; //ご自分のルーターのSSIDに書き換えてください
const char* password = "xxxxxxxxxxxxx"; //ご自分のルーターのパスワードに書き換えてください
const char* UTF8SJIS_file = "/font/Utf8Sjis.tbl"; //UTF8 Shift_JIS 変換テーブルファイル名を記載しておく
const char* Shino_Zen_Font_file = "/font/shnmk16.bdf"; //全角フォントファイル名を定義
const char* Shino_Half_Font_file = "/font/shnm8x16.bdf"; //半角フォントファイル名を定義
const char* HTM_head_file1 = "/EWS/LIP2hed1.txt"; //HTMLヘッダファイル1
const char* HTM_head_file2 = "/EWS/LIP2hed2.txt"; //HTMLヘッダファイル2
const char* dummy_file = "/EWS/dummy.txt"; //HTMLファイル連結のためのダミーファイル
ESP32_LCD_ILI9341_SPI LCD(sck, miso, mosi, cs, dc, rst, LCD_LEDpin);
ESP32_SD_ShinonomeFNT SFR(CS_SD, 40000000); //SPI 24MHz
ESP32_Button_Switch BTN;
SD_EasyWebSocket ews;
IPAddress LIP; //ローカルIPアドレス自動取得用
//------LCD文字表示系 引数初期化------------
uint8_t max_txt = 40; //1x1倍 最大文字表示数
uint8_t ws_txt_sj_txt[ 400 ] = {}; //Shift_JIS文字コード格納
uint16_t ws_txt_sj_length;
uint8_t ws_txt_font_buf[2][16] = {}; //16x16フォント全角1文字格納バッファ
uint8_t Scl_Buf[ 16 ][ 640 ] = {}; //文字列スクロールpixelバッファ
//65k color red (0-31), green (0-63), blue (0-31)
uint8_t red = 31, green = 63, blue = 31;
uint8_t V_size = 3, H_size = 3; //V_size(垂直方向文字サイズ)、H_size(水平方向サイズ)
uint8_t prev_V_size = V_size;
uint16_t X0 = 0, Y0 = 0;
int32_t scl_speed = 0; //スクロール速度(0が最速)
bool scl_pause = false;
int8_t Scl_Cnt = {}; //文字スクロールカウント
uint16_t Fnt_Cnt = {}; //フォント半角1文字スクロールカウント
uint8_t Zen_or_Han = {}; //フォント読み取り時に関数から返ってきた全角または半角かの数値を格納
uint8_t num = 0; //文字列番号
//-----ボタンスイッチ 引数初期化-----------
const uint8_t buttonA_GPIO = 39;
const uint8_t buttonB_GPIO = 38;
const uint8_t buttonC_GPIO = 37;
uint8_t btn_stateA = _Release;
uint8_t btn_stateB = _Release;
uint8_t btn_stateC = _Release;
boolean V_size_down = false;
//------Easy WebSpclet関連 引数初期化----------------
String ret_str; //ブラウザから送られてくる文字列格納用
int PingSendTime = 10000; //ESP32からブラウザへPing送信する間隔(ms)
bool get_http_req_status = false; //ブラウザからGETリクエストがあったかどうかの判定変数
uint8_t WS_Status = 0;
//-----発話pronounce引数初期化-----------
boolean f_pronOnOff = false; // flug true:ON(発声), false:off(発声停止)
String pron_str; // pronounce string
//***********セットアップ************************************************************************************
void setup() {
// initialize the M5Stack object
M5.begin();
M5.Power.begin();
// port setup
pinMode(PIN_M5SPK, OUTPUT); // M5stack speaker
pinMode(PIN_M5SPKMUTE, OUTPUT); // M5stack speaker Mute port
pinMode(buttonA_GPIO, INPUT); //GPIO #39 は内部プルアップ無し
pinMode(buttonB_GPIO, INPUT); //GPIO #38 は内部プルアップ無し
pinMode(buttonC_GPIO, INPUT); //GPIO #37 は内部プルアップ無し
ledcSetup(LEDC_CH, LEDC_BASEFREQ, LEDC_TIMBIT); // pwm config for servo
ledcAttachPin(LEDC_GPIOPIN, LEDC_CH); // pwm pin config for servo
// serial
Serial.begin(115200);
// init touch (decision the touch threshold by filtered touch datas)
int t[TS_INITCNTNUM];
for(int i = 0; i < TS_INITCNTNUM; i++){ // read touch value TS_INITCNTNUM times
t[i] = touchRead(PIN_TOUCH);
if(i >= (TS_INITCNTNUM - TS_INITAVGNUM)) touch_ths += t[i]; // only some new data is read
delay(100);
}
touch_ths = (touch_ths * TS_THSRATIO) / TS_INITAVGNUM ; // decision threshold
printa("touch threshold check"); // std out
for(int i = 0; i < TS_INITCNTNUM; i++){
M5.Lcd.printf("%d ",t[i]);
Serial.print(t[i]);Serial.print(", ");
}
M5.Lcd.printf("\r\ntouch threshold = %d\r\n",touch_ths);
Serial.print("touch threshold = ");Serial.println(touch_ths);
// init AquesTalk
int iret;
printa("Initializing AquesTalk...");
iret = CAqTkPicoF_Init(workbuf, LEN_FRAME, "XXX-XXX-XXX");
if(iret){
printa("ERR:CAqTkPicoF_Init");
}
printa("Done!\r\n");
// init servo
servo_on(TAILPOS_ON);
delay(2000);
servo_on(TAILPOS_OFF);
// font setup
SFR.SD_Shinonome_Init3F(UTF8SJIS_file, Shino_Half_Font_file, Shino_Zen_Font_file); //ライブラリ初期化。3ファイル同時に開く
LCD.ILI9341_Init(false, 40000000); //microSDを使う場合、必ず false にする
LCD.Display_Clear();
LCD.Brightness(0); //LCD LED Full brightness
//---------オープニング画面表示--------------
String test_str[ 4 ] ;
test_str[0] = "M5stack";
test_str[1] = "Wi-Fi WebSocket";
test_str[2] = "Message Board";
test_str[3] = "by microSD";
uint8_t test_buf[ 4 ][ 17 ][ 16 ] = {};
uint16_t test_sj_len[ 4 ] = {};
for( num = 0; num < 4; num++ ){
test_sj_len[ num ] = SFR.StrDirect_ShinoFNT_readALL(test_str[ num ], test_buf[ num ]);
Serial.printf("test_sj_len = %d\r\n", test_sj_len[ num ]);
}
num = 0, X0 = 48;
LCD.HVsizeUp_8x16_Font_DisplayOut(2, 3, test_sj_len[ num ], X0, num * 48, red, green, blue, test_buf[ num ]);
num = 1, X0 = 48;
LCD.HVsizeUp_8x16_Font_DisplayOut(2, 3, test_sj_len[ num ], X0, num * 48, red, green, blue, test_buf[ num ]);
num = 2, X0 = 48;
LCD.HVsizeUp_8x16_Font_DisplayOut(2, 3, test_sj_len[ num ], X0, num * 48, red, green, blue, test_buf[ num ]);
num = 3, X0 = 80;
LCD.HVsizeUp_8x16_Font_DisplayOut(2, 3, test_sj_len[ num ], X0, num * 48, red, green, blue, test_buf[ num ]);
X0 = 0;
for( int i = 0; i < 256; i++){
LCD.Brightness(i);
delay(10);
}
//--------メッセージウィンドウ表示---------
red = 15, green = 30, blue = 15;
Status_Message("WiFi Connecting...", red, green, blue);
//--------Wi-Fiアクセスポイント接続---------
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println(F("WiFi connected"));
LIP = WiFi.localIP(); //ESP32のローカルIPアドレスを自動取得
Serial.println( LIP );
red = 31, green = 63, blue = 31;
Status_Message( "IP : " + LIP.toString(), red, green, blue);
ews.EWS_server_begin(); //ESP32 server生成
LCD.Display_Clear(0, 0, 319, 4 * 48 - 1);
//---------スクロール文字列のセットアップ-------------
num = 0, red = 31, green = 63, blue = 31;
LCD.Scrolle_Font_SetUp(num, max_txt, red, green, blue);
Serial.printf("Free Heap Size = %d\r\n", esp_get_free_heap_size());
//---------マルチタスク定義-------------------
TaskHandle_t th; //マルチタスクハンドル定義
xTaskCreatePinnedToCore(Task1, "Task1", 8192, NULL, 5, &th, 0); //マルチタスク起動
}
//***********メインループ************************************************************************************
void loop() {
WebSocket_handshake(); //WebSocket ハンドシェイクでブラウザにHTML送信
WebSocket_txt_receive(); //ブラウザからのテキスト受信
check_touch(); // タッチされたかチェック
if( !scl_pause ){ //文字列スクロール
num = 0, X0 = 0, Y0 = 0;
if( LCD.Scrolle_Inc_HVsizeUp_8x16_Font_DisplayOut(num, Zen_or_Han, scl_speed, H_size, V_size, &Scl_Cnt, ws_txt_sj_length, X0, Y0, ws_txt_font_buf, Scl_Buf) ){
Zen_or_Han = SFR.Sjis_inc_FntRead(ws_txt_sj_txt, ws_txt_sj_length, &Fnt_Cnt, ws_txt_font_buf);
}
if( V_size_down ) {
//ボタン操作の Task1 で、文字サイズダウンした場合、
//LCDはVSPI接続でmicroSDと共用のため、同じループタスクで画面消去を行う。
LCD.Display_Clear( 0, V_size * 16 + Y0 - 1, 319, prev_V_size * 16 + Y0 - 1 );
V_size_down = false;
}
prev_V_size = V_size;
}
if( ews.WebSocket_Status() != WS_Status ){
WS_Status = ews.WebSocket_Status();
switch( WS_Status ){
case 0:
red = 31, green = 0, blue = 0;
Status_Message( "WebSocket CLOSE", red, green, blue);
break;
case 1:
red = 0, green = 63, blue = 31;
Status_Message( "WebSocket Connected", red, green, blue);
break;
}
Serial.printf("WS_Status = %d\r\n", WS_Status);
Serial.printf("ews.WebSocket_Status() = %d\r\n", ews.WebSocket_Status());
}
// talking
if(f_pronOnOff == true){
playw(pron_str.c_str());
f_pronOnOff = false;
}
// moving tail on
else if(f_touchdet == true){
playw(TS_SOUND);
f_touchdet = false;
servo_on(TAILPOS_ON);
f_tail = true;
time_tailmove = millis();
}
// moving tail off
if(f_tail == true){
unsigned long time_now = millis();
if(time_now - time_tailmove > TAILMOVETIME){
servo_on(TAILPOS_OFF);
f_tail = false;
}
}
}
//************************************************************************************
/* servo PWM control
*/
static void servo_on(int degree){
if(degree <= 90 && degree >= -90){
float dd = (degree + 90) / 180.0 ;
ledcWrite(LEDC_CH, (int)(65536 * (SERVO_MIN_WIDTH_MS + dd * (SERVO_MAX_WIDTH_MS -SERVO_MIN_WIDTH_MS)) / 20.0));
}
}
static void servo_off(void){
ledcWrite(LEDC_CH, 0x00);
}
/* Print All wrapper
*/
static void printa(const char* str){
M5.Lcd.printf("%s\r\n",str);
Serial.println(str);
}
/* Play wrapper
* dac create and release
*/
static void playw(const char* str){
printa(str);
DAC_Create();
spk_on();
Play(str);
spk_off();
DAC_Release();
}
/* M5stack speaker amp on/off (enable/disable)
アンプのEnable端子をgpioでコントロール*/
static void spk_off(void){
digitalWrite(PIN_M5SPKMUTE, HIGH);
}
static void spk_on(void){
digitalWrite(PIN_M5SPKMUTE, LOW);
}
// touch sensor func. call main roop frequently
// touch_val0 : previous data for noise removal
void check_touch(void){
static int touch_val0;
int touch_val1 = touchRead(PIN_TOUCH);
Serial.print("Touch = ");Serial.println(touch_val1);
if((touch_val1 < touch_ths) && (touch_val0 < touch_ths)){ // comparison val and ths
f_touchdet = true;
}
touch_val0 = touch_val1;
}
//************ マルチタスクループ ****************************
void Task1(void *pvParameters) {
while(1){
button_action();
delay(1); //most important
}
}
//******************************************************
void WebSocket_txt_receive(){
ret_str = ews.EWS_ESP32CharReceive(PingSendTime);
if(ret_str != "_close"){
if(ret_str != "\0"){
Serial.println(ret_str);
if(ret_str != "Ping"){
if(ret_str[0] == 't'){
//ブラウザからのテキスト文字列受信
String txt = ret_str.substring(ret_str.indexOf('|')+1, ret_str.length()-1);
Serial.println( txt );
StrFontConv( txt );
}
else if(ret_str[0] == 'p'){
//発音pronounceデータ取得
String txt = ret_str.substring(ret_str.indexOf('|')+1, ret_str.length()-1);
Serial.print("pronounce = ");Serial.println( txt );
pron_str = txt; // save to pronounce resistor
f_pronOnOff = true; // speak start
}
else {
int ws_data = (ret_str[0]-0x30)*100 + (ret_str[1]-0x30)*10 + (ret_str[2]-0x30);
uint8_t picker_red;
uint8_t picker_green;
uint8_t picker_blue;
float deg;
float deg2;
char col_c_65k[9] = {}; //ILI9341 65kカラー文字列収納
char col_c_code[8] = {}; //HTMLカラーコード文字列格納
String col_str;
switch(ret_str[4]){
case 'M': //スクロールスタート
scl_pause = false;
red = 0, green = 63, blue = 0;
Status_Message( "Scrolle Start", red, green, blue);
break;
case 'N': //スクロール一時停止
scl_pause = true;
red = 31, green = 0, blue = 0;
Status_Message( "Scrolle Pause", red, green, blue);
break;
case 'S': //スクロール速度、文字サイズアップ
switch(ret_str[9]){
case '1': //スクロール速度設定
scl_speed = 100 - floor(ws_data/2);
break;
case '2': //水平文字サイズ変更
H_size = floor(ws_data/20);
if( H_size > 10 ) H_size = 10;
if( H_size < 1 ) H_size = 1;
Serial.printf("H_size = %d\r\n", H_size);
break;
case '3': //垂直文字サイズ変更
V_size = floor(ws_data/20);
if( V_size > 10 ) V_size = 10;
if( V_size < 1 ) V_size = 1;
if( prev_V_size > V_size ) V_size_down = true;
Serial.printf("V_size = %d\r\n", V_size);
break;
}
break;
case 'C': //カラーピッカー数値変換
//HTMLカラーコード変換
picker_red = (ret_str[10]-0x30)*100 + (ret_str[11]-0x30)*10 + (ret_str[12]-0x30);
picker_green = (ret_str[14]-0x30)*100 + (ret_str[15]-0x30)*10 + (ret_str[16]-0x30);
picker_blue = (ret_str[18]-0x30)*100 + (ret_str[19]-0x30)*10 + (ret_str[20]-0x30);
sprintf( col_c_code, "#%02X%02X%02X", picker_red, picker_green, picker_blue );
//ILI9341 65k カラー変換
deg = (float)31 / (float)255 ;
deg2 = (float)63 / (float)255 ;
red = round( (float)picker_red * deg );
green = round( (float)picker_green * deg2 );
blue = round( (float)picker_blue * deg );
Serial.printf("red, green, blue = %d, %d, %d\r\n", red, green, blue );
LCD.Scrolle_Font_SetUp(0, max_txt, red, green, blue);
sprintf( col_c_65k, "%02d,%02d,%02d", red, green, blue );
col_str = String( col_c_code ) + " ";
col_str += String( col_c_65k );
Status_Message( col_str, red, green, blue);
break;
}
}
ret_str = "";
}
}
}else if(ret_str == "_close"){
Serial.println("---------------WebSocket Close");
ret_str = "";
}
}
//******** Status メッセージ表示***************
void Status_Message(String str, uint8_t Red, uint8_t Green, uint8_t Blue){
//ILI9341 ディスプレイに 半角19文字まで表示可能
uint8_t f_buf[ 40 ][ 16 ] = {};
uint16_t len = SFR.StrDirect_ShinoFNT_readALL(str, f_buf);
if( len > 38 ) len = 19;
X0 = 8, Y0 = ( 4 * 48 + 1 ) + 10;
LCD.Display_Clear(1, Y0 + 1, 318, 238);
LCD.HVsizeUp_8x16_Font_DisplayOut(2, 2, len, X0, Y0, Red, Green, Blue, f_buf);
LCD.Draw_Rectangle_Line(0, 4 * 48, 319, 239, 31, 63, 31);
}
//********* String 文字列フォント変換***********
void StrFontConv(String str){
Fnt_Cnt = 0;
ws_txt_sj_length = SFR.UTF8toSJIS_convert(str, ws_txt_sj_txt);
Zen_or_Han = SFR.Sjis_inc_FntRead(ws_txt_sj_txt, ws_txt_sj_length, &Fnt_Cnt, ws_txt_font_buf);
Serial.printf("ws_txt_sj_length = %d\r\n", ws_txt_sj_length);
Scl_Cnt = 0;
}
//********** ボタンスイッチ操作関数**************
void button_action(){
btn_stateA = BTN.Button(0, buttonA_GPIO, true, 10, 300);
switch( btn_stateA ){
case _MomentPress:
Serial.println("Button A Moment Press");
V_size--;
if(V_size < 1) V_size = 1;
if( prev_V_size > V_size ) V_size_down = true;
Serial.printf("V_size =%d\r\n", V_size);
break;
case _ContPress:
Serial.println("-------------Button A Cont Press");
V_size++;
if(V_size > 10) V_size = 10;
Serial.printf("V_size =%d\r\n", V_size);
break;
default:
break;
}
btn_stateB = BTN.Button(1, buttonB_GPIO, true, 10, 300);
switch( btn_stateB ){
case _MomentPress:
Serial.println("Button B Moment Press");
H_size--;
if(H_size < 1) H_size = 1;
Serial.printf("H_size =%d\r\n", H_size);
break;
case _ContPress:
Serial.println("-------------Button B Cont Press");
H_size++;
if(H_size > 15) H_size = 15;
Serial.printf("H_size =%d\r\n", H_size);
break;
default:
break;
}
btn_stateC = BTN.Button(2, buttonC_GPIO, true, 10, 300);
switch( btn_stateC ){
case _MomentPress:
Serial.println("Button C Moment Press");
scl_speed++;
if(scl_speed > 100) scl_speed = 100;
Serial.printf("scl_speed =%d\r\n", scl_speed);
break;
case _ContPress:
Serial.println("-------------Button C Cont Press");
scl_speed--;
if(scl_speed < 0) scl_speed = 0;
Serial.printf("scl_speed =%d\r\n", scl_speed);
break;
default:
break;
}
}
//***********************************************
void WebSocket_handshake(){
if(ews.Get_Http_Req_Status()){ //ブラウザからGETリクエストがあったかどうかの判定
red = 15, green = 30, blue = 15;
Status_Message( "WS connecting", red, green, blue );
String html_str1="", html_str2="", html_str3="", html_str4="", html_str5="", html_str6="", html_str7="";
//※String変数一つにEWS_Canvas_Slider_T関数は2つまでしか入らない
html_str1 += "<body style='background:#000; color:#fff;'>\r\n";
html_str1 += "<font size=3>\r\n";
html_str1 += "ESP-WROOM-32(ESP32)\r\n";
html_str1 += "<br>\r\n";
html_str1 += "SD_EasyWebSocket Beta1.60 Sample\r\n";
html_str1 += "</font><br>\r\n";
html_str1 += ews.EWS_BrowserSendRate();
html_str1 += "<br>\r\n";
html_str1 += ews.EWS_Status_Text2("WebSocket Status","#555", 20,"#FF00FF");
html_str1 += "<br><br>\r\n";
html_str2 += "Set Messages \r\n";
html_str2 += ews.EWS_TextBox_Send("txt1", "おは今晩ちわ ","送信");
html_str2 += "<br><br>\r\n";
html_str2 += "Set Pronunciation \r\n";
html_str2 += ews.EWS_TextBox_Send("pronounce", "ohakonbanchiwa","送信");
html_str2 += "<br><br>\r\n";
html_str2 += "Scrolle \r\n";
html_str2 += ews.EWS_On_Momentary_Button("Move", "Start", 80,25,15,"#000000","#AAAAAA");
html_str2 += ews.EWS_On_Momentary_Button("NoMove", "Pause", 80,25,15,"#FFFFFF","#555555");
html_str2 += "<br>\r\n";
html_str3 += "<br>Scrolle Speed \r\n";
html_str3 += ews.EWS_Canvas_Slider_T("Speed1",200,40,"#777777","#CCCCFF"); //CanvasスライダーはString文字列に2つまでしか入らない
html_str3 += "<br>H_Size \r\n";
html_str3 += ews.EWS_Canvas_Slider_T("Speed2",200,40,"#777777","#FFFFCC"); //CanvasスライダーはString文字列に2つまでしか入らない
html_str4 += "<br>V_Size \r\n";
html_str4 += ews.EWS_Canvas_Slider_T("Speed3",200,40,"#777777","#CCFFCC"); //CanvasスライダーはString文字列に2つまでしか入らない
html_str4 += "<br><br>Text Color Picker \r\n";
html_str4 += ews.Color_Picker( 0, 100, "#FFFFFF", "Color");
html_str5 += "<br><br><br><br>\r\n";
html_str5 += ews.EWS_WebSocket_Reconnection_Button2("WS-Reconnect", "grey", 200, 40, "black" , 17);
html_str5 += "<br><br>\r\n";
html_str5 += ews.EWS_Close_Button2("WS CLOSE", "#bbb", 150, 40, "red", 17);
html_str5 += ews.EWS_Window_ReLoad_Button2("ReLoad", "#bbb", 150, 40, "blue", 17);
html_str5 += "</body></html>";
//WebSocket ハンドシェイク関数
ews.EWS_HandShake_main(3, CS_SD, HTM_head_file1, HTM_head_file2, dummy_file, dummy_file, LIP, html_str1, html_str2, html_str3, html_str4, html_str5, html_str6, html_str7);
red = 0, green = 63, blue = 0;
Status_Message( "Websocket SET", red, green, blue );
}
}
// AquesTalk*******************************************************************
///////////////////////////
//
void Play(const char *koe)
{
Serial.print("Play:");
Serial.println(koe);
int iret = CAqTkPicoF_SetKoe((const uint8_t*)koe, 50, 0xffffU);
if(iret) Serial.println("ERR:CAqTkPicoF_SetKoe");
for(;;){
int16_t wav[LEN_FRAME];
uint16_t len;
iret = CAqTkPicoF_SyntheFrame(wav, &len);
if(iret) break; // EOD
DAC_Write((int)len, wav);
}
}
//i2s configuration
const int i2s_num = 0; // i2s port number
i2s_config_t i2s_config = {
.mode = (i2s_mode_t)(I2S_MODE_MASTER | I2S_MODE_TX | I2S_MODE_DAC_BUILT_IN),
.sample_rate = 24000,
.bits_per_sample = I2S_BITS_PER_SAMPLE_16BIT,
.channel_format = I2S_CHANNEL_FMT_RIGHT_LEFT,
.communication_format = (i2s_comm_format_t)I2S_COMM_FORMAT_I2S_MSB,
.intr_alloc_flags = 0,
.dma_buf_count = 4,
.dma_buf_len = 384,
.use_apll = 0
};
void DAC_Create()
{
AqResample_Reset();
i2s_driver_install((i2s_port_t)i2s_num, &i2s_config, 0, NULL);
i2s_set_pin((i2s_port_t)i2s_num, NULL);
}
void DAC_Release()
{
i2s_driver_uninstall((i2s_port_t)i2s_num); //stop & destroy i2s driver
}
// upsampling & write to I2S
int DAC_Write(int len, int16_t *wav)
{
int i;
for(i=0;i<len;i++){
// upsampling x3
int16_t wav3[3];
AqResample_Conv(wav[i], wav3);
// write to I2S DMA buffer
for(int k=0;k<3; k++){
uint16_t sample[2];
uint16_t us = ((uint16_t)wav3[k])^0x8000U; // signed -> unsigned data xxxxDA Only
sample[0]=sample[1]=us; // mono -> stereo
int iret = i2s_push_sample((i2s_port_t)i2s_num, (const char *)sample, 100);
if(iret<0) return iret; // -1:ESP_FAIL
if(iret==0) break; // 0:TIMEOUT
}
}
return i;
}
Arduino IDEでM5stackに書込
では、M5stackをPCに繋げ、コンパイルして書き込みしてみます。
PCに繋げると勝手に電源が入ります。(付かない時は電源ボタン2回押し)
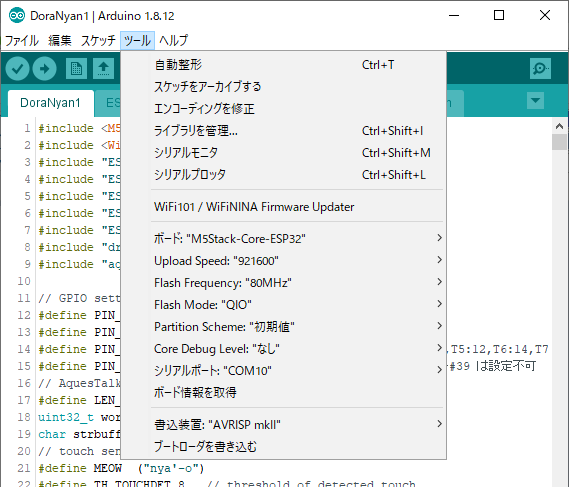
Arduino IDEの「ツール」をクリック、その下の「ボード」~「シリアルポート」までの設定を確認します。下図はWindowsの場合。「シリアルポート」のCOMの値は、USBの差し込む場所や環境によって変化しますので、正しい値を選択して下さい。macの場合は「シリアルポート」の表記が異なります。
準備が出来たら「ファイル」の下辺りにある、右矢印型のアイコン「マイコンボードに書き込む」があるのでクリックすると、コンパイルと書き込みが始まります。
コンパイルは、ESP32系ライブラリが沢山あるためか、数分かかります。書き込みも1分弱掛かります。
書き込みが完了するとこんな感じ。
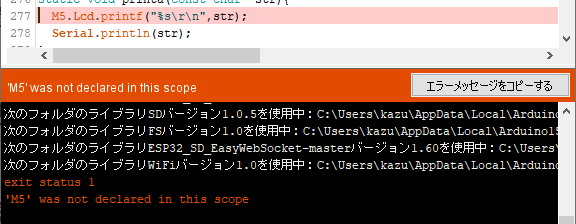
もしM5stack・日本語フォント・AquesTalkのセットアップに不備があったりプログラムにエラーがあると、こんな感じでエラー箇所がハイライトされます。
その場合、エラー箇所を見ながら該当のセットアップの項を再確認してみて下さい。
また、書き込み時に異音がしたりして書き込みが進まずエラーになる時は、まず「Upload Speed」を921600bpsから115200に落としてみて下さい。それでも駄目な場合、各種ノイズの影響の場合があります。タッチセンサーのジャンパーワイヤーを一旦外して書き込んでみるか、M5StackのGND端子を触りながら書き込むとうまく行く!?場合があります。「M5stack 書き込み エラー」で検索すると色々出てきます。
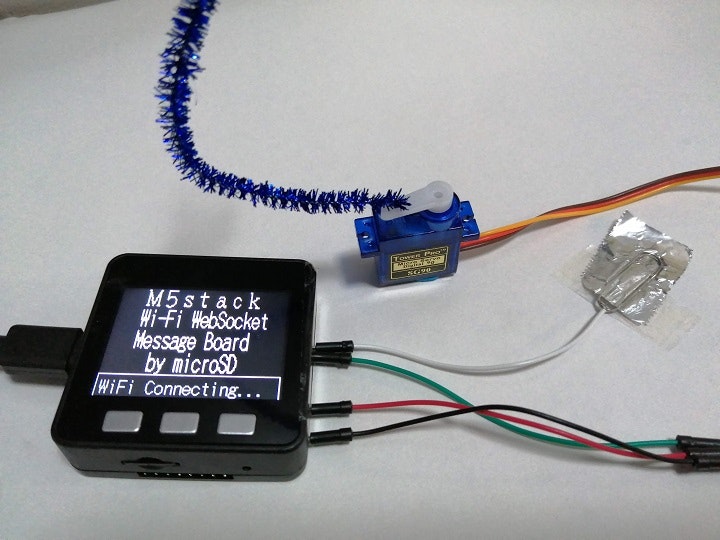
動作確認
書き込み後、M5stackがリセットされ、サーボがテストのため一度動いて戻り図のような画面が表示されます。リセットされない場合は、M5stackの電源ボタンを1度押しするとリセットされます。
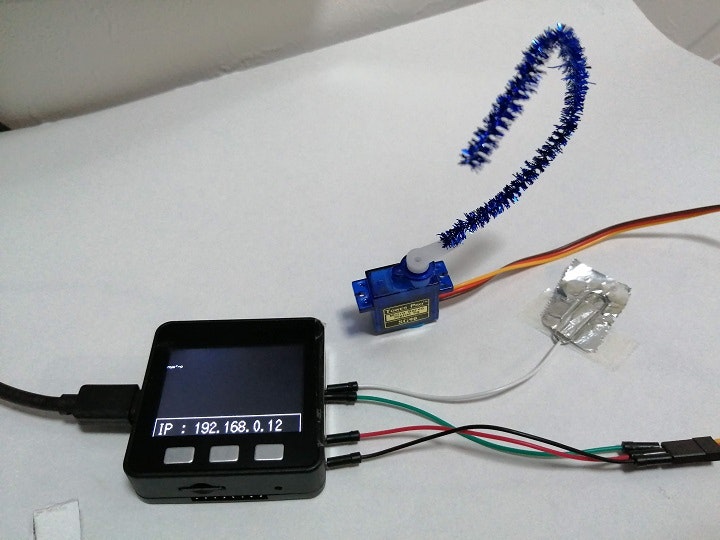
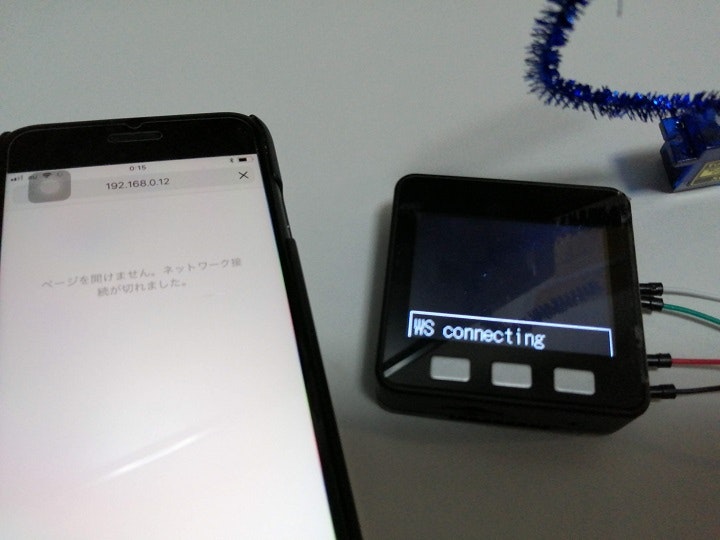
その後M5stackの画面にIPアドレスが表示されると思います。例:192.168.0.12とか。
ルーターにiPhoneやAndroid、又はPC等の操作デバイスをWi-Fi接続します。「Arduinoソースコード」項にてM5stackを繋げるため設定したルーターと同じルーターでないと駄目です。NAT超えしません。
操作デバイス上でWebブラウザを立ち上げ、検索窓に上記M5stackで表示されているIPアドレスを記載しEnterを押します。するとM5stackの画面表示が下図の通り、「WS connecting」に変化し接続を開始します。
その後しばらくして「WS connected」に変わったら、接続完了です!
操作デバイスには操作ページが表示されます。中央に2行、文字入力できる部分があります。
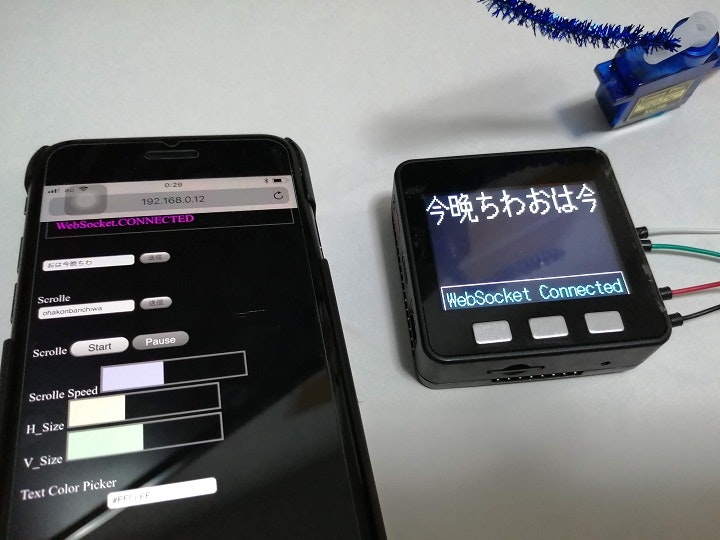
上の方は表示用です。日本語で入力し「送信」を押すとM5stackの画面にスクロールしながら表示されます。
下の方は発話用です。日本語の発音をアルファベットで表記して入力します。例えば、「おはこんばんちわ」と発話させたかったら、「ohakonbanchiwa」と記載し、横の送信をクリック。するとM5stackのスピーカーからAquesTalkで合成された声が聞こえます。詳しい記載方法は、「AquesTalkで日本語発話のセットアップ」項のリンク先を辿ると仕様書がありますので参照してみて下さい。1点注意事項。発話用入力部にスペースや改行などが入ると、バグったりリセットされる可能性があります。
その他の機能として、スクロールスピードや文字サイズや色を変えられたりします。
それから、タッチセンサーの金属部に触れ続けると、にゃぁと鳴き、尻尾が動きます。センサー感度は、M5stackをUSBで繋げているかで変わってきます。どうしても動きが悪い様でしたら、ソースコードの38行、TS_THSRATIOの値を0.93から1.0に近づけてみて下さい。
ケース組込・今後の課題
冒頭の画像の通り、3Dプリンターでケースを作ってみました。厚みを薄くしすぎたせいか、樹脂表面にゴミが沢山付いてしまっています・・・。万が一ご要望が沢山来たら、3Dデータをもう少しまともにして公開しようかと思います。
尻尾がちゃんと動くように、サーボの固定方法を考える必要がありますね。
タッチセンサーもうまくケースに付けられるよう工夫が必要です。
スピーカーは音量設定できないのでボリュームがあると良いですね。発話していない時にノイズ音がうるさい問題は、M5stackの問題としてあるみたいですが、色々調べてやっても結局駄目だったので、M5stackの中のスピーカアンプICのEN端子をコントロールするように改造してあります。
そうそう、本機は電力消費が多いためバッテリー駆動で動かすと、速攻で電池切れます・・・
おわりに
多くの方のご苦労と情報開示の素晴らしいスピリットのお陰で、楽しい電子工作が簡単に出来るようになってきています。
各リンク先で情報を提供して頂いている方々に感謝致します。
※ライセンス問題やその他ありましたら、ページ下部の「編集リクエスト」アイコンからご連絡ください。