はじめに
PythonからOpenCVを使ってStructure From Motionを試すための環境構築手順です。
OpenCVのcontribにはsfmモジュールが含まれていますが、pipやcondaでinstallできるビルド済みのopencv-contrib-pythonパッケージにはsfmモジュールが含まれてないようです(多分)。
そこでcontribを含めて、ソースからビルドを行います。
参考
- OpenCV -- Installation in MacOS
- SFM module installation
- Compiling OpenCV with Structure From Motion module Python bindings
- OpenCV configuration options reference
前提
-
gcc、g++、cmake、git、miniconda、brewはインストール済み。 - 今回はminicondaを使用してPython3.9の環境を使います。
OpenCVのビルド
minicondaを使用してPython3.9の環境を用意します。
conda create -n py39 python=3.9
sfmモジュールが依存するものをインストールします。
brew install eigen
brew install gflags
brew install glog
brew install ceres-solver
OpenCVのソースをダウンロードします。<my_working_directory>は作業用のディレクトリです。
cd ~/<my_working_directory>
git clone https://github.com/opencv/opencv.git
git clone https://github.com/opencv/opencv_contrib.git
sfmモジュールのソースを少しいじります。
Pythonのbindingをつくりたい関数にCV_EXPORTS_Wをつけます。複数の関数をbindingする場合はオーバーロードできない場合があるので、CV_EXPORTS_AS()を使用して名前をつけます。
CERES_FOUNDに関係なくコンパイルされるようにします。#if defined(CV_DOXYGEN) || defined(CERES_FOUND)をコメントアウトします。
また、points2d、points3d、Ps、Rs、Tsの型を変更します。
#ifndef __OPENCV_SFM_RECONSTRUCT_HPP__
#define __OPENCV_SFM_RECONSTRUCT_HPP__
#include <vector>
#include <string>
#include <opencv2/core.hpp>
namespace cv
{
namespace sfm
{
//! @addtogroup reconstruction
//! @{
//#if defined(CV_DOXYGEN) || defined(CERES_FOUND) // コメントアウト
CV_EXPORTS
void
reconstruct(InputArrayOfArrays points2d, OutputArrayOfArrays Ps, OutputArrayOfArrays points3d,
InputOutputArray K, bool is_projective = false);
CV_EXPORTS
void
reconstruct(InputArrayOfArrays points2d, OutputArrayOfArrays Rs, OutputArrayOfArrays Ts,
InputOutputArray K, OutputArrayOfArrays points3d, bool is_projective = false);
CV_EXPORTS
void
reconstruct(const std::vector<String> images, OutputArrayOfArrays Ps, OutputArrayOfArrays points3d,
InputOutputArray K, bool is_projective = false);
CV_EXPORTS_W // CV_EXPORTSからCV_EXPORTS_Wに変更
void
reconstruct(const std::vector<String> images, OutputArrayOfArrays Rs, OutputArrayOfArrays Ts,
InputOutputArray K, OutputArrayOfArrays points3d, bool is_projective = false);
//#endif /* CV_DOXYGEN || CERES_FOUND */ // 消す
//! @} sfm
} /* namespace cv */
} /* namespace sfm */
#endif
build用のディレクトリを作成します。
mkdir build && cd build
cmakeを実行します。
cmake ../opencv \
-DOPENCV_EXTRA_MODULES_PATH='../opencv_contrib/modules' \
-DCMAKE_BUILD_TYPE=Release \
-DBUILD_EXAMPLES=ON \
-DBUILD_opencv_python3=ON \
-DPYTHON_EXECUTABLE=/Users/abet/opt/miniconda3/envs/py39/bin/python \
-DPYTHON3_EXECUTABLE=/Users/abet/opt/miniconda3/envs/py39/bin/python \
-DPYTHON3_INCLUDE_DIRS=/Users/abet/opt/miniconda3/envs/py39/include/python3.9 \
-DPYTHON3_NUMPY_INCLUDE_DIRS=/Users/abet/opt/miniconda3/envs/py39/lib/python3.9/site-packages/numpy/core/include \
-DBUILD_JPEG_TURBO_DISABLE=ON
-DBUILD_TESTS=OFF
-DBUILD_ZLIB=OFF
コツは-DBUILD_ZLIB=OFFです。MacbookでCommandLineToolsが入っている環境では、CommandLineTools配下のzlibを探しにいってしまうみたいで、ビルドがうまくいきません。
また、こちらを参考に、-DBUILD_JPEG_TURBO_DISABLE=ONとします。
実行後、色々出力されますが、下記の項目あたりをチェックしておけば良さそうです。
-- General configuration for OpenCV 4.5.5-dev =====================================
-- Version control: 4.5.5-337-g767857c516 # バージョン
--
-- Extra modules:
-- Location (extra): /Users/abet/Documents/repository/opencv_exp/opencv_contrib/modules # contribが含まれているか
-- Version control (extra): 4.5.5-66-gb8e4061a
--
-- Platform:
-- Timestamp: 2022-04-28T09:07:14Z
-- Host: Darwin 21.4.0 x86_64
-- CMake: 3.23.1
-- CMake generator: Unix Makefiles
-- CMake build tool: /usr/bin/make
-- Configuration: Release
-- C/C++:
-- Built as dynamic libs?: YES
-- C++ standard: 11
-- C++ Compiler: /Library/Developer/CommandLineTools/usr/bin/c++ (ver 13.0.0.13000027)
-- OpenCV modules:
-- To be built: alphamat aruco barcode bgsegm bioinspired calib3d ccalib core datasets dnn dnn_objdetect dnn_superres dpm face features2d flann freetype fuzzy gapi hdf hfs highgui img_hash imgcodecs imgproc intensity_transform line_descriptor mcc ml objdetect optflow phase_unwrapping photo plot python3 quality rapid reg rgbd saliency sfm shape stereo stitching structured_light superres surface_matching text tracking ts video videoio videostab viz wechat_qrcode xfeatures2d ximgproc xobjdetect xphoto
-- Disabled: world
-- Disabled by dependency: -
-- Unavailable: cudaarithm cudabgsegm cudacodec cudafeatures2d cudafilters cudaimgproc cudalegacy cudaobjdetect cudaoptflow cudastereo cudawarping cudev cvv java julia matlab ovis python2
-- Applications: tests perf_tests examples apps
-- Documentation: NO
-- Non-free algorithms: NO
--
-- Media I/O:
-- ZLib: /Library/Developer/CommandLineTools/SDKs/MacOSX12.3.sdk/usr/lib/libz.tbd (ver 1.2.11)
-- JPEG: build-libjpeg-turbo (ver 2.1.2-62)
-- WEBP: build (ver encoder: 0x020f)
-- PNG: libpng (ver 1.6.37)
-- TIFF: libtiff (ver 42 / 4.2.0)
-- JPEG 2000: build (ver 2.4.0)
-- OpenEXR: OpenEXR::OpenEXR (ver 3.1.5)
-- HDR: YES
-- SUNRASTER: YES
-- PXM: YES
-- PFM: YES
-- Other third-party libraries:
-- Intel IPP: 2020.0.0 Gold [2020.0.0]
-- at: /Users/abet/Documents/repository/opencv_exp/build/3rdparty/ippicv/ippicv_mac/icv
-- Intel IPP IW: sources (2020.0.0)
-- at: /Users/abet/Documents/repository/opencv_exp/build/3rdparty/ippicv/ippicv_mac/iw
-- Lapack: YES (/Library/Developer/CommandLineTools/SDKs/MacOSX12.3.sdk/System/Library/Frameworks/Accelerate.framework -lm -ldl)
-- Eigen: YES (ver 3.4.0)
-- Custom HAL: NO
-- Protobuf: build (3.19.1)
-- Python 3: # 下記項目が埋まっていればpython用のビルドが実行されます。
-- Interpreter: /Users/abet/opt/miniconda3/envs/py39/bin/python (ver 3.9.12)
-- Libraries: /Users/abet/opt/miniconda3/envs/py39/lib/libpython3.9.dylib (ver 3.9.12)
-- numpy: /Users/abet/opt/miniconda3/envs/py39/lib/python3.9/site-packages/numpy/core/include (ver 1.21.5)
-- install path: lib/python3.9/site-packages/cv2/python-3.9
--
-- Python (for build): /Users/abet/opt/miniconda3/envs/py39/bin/python
ビルドを行います。
make -j4
Python用のインストールを行います。
cd /python_loader
conda activate py39
python setup.py install
c++で使う場合は、buildディレクトリでmake installします。
brewでインストールしたGCCを使う場合[未解決]
zlibをインストールします。
brew install zlib
cmakeを実行します。-DCMAKE_CXX_COMPILERオプションでg++を指定します。
cmake ../opencv \
-DOPENCV_EXTRA_MODULES_PATH='../opencv_contrib/modules' \
-DCMAKE_CXX_COMPILER='/usr/local/bin/g++' \
-DCMAKE_BUILD_TYPE=Release \
-DBUILD_EXAMPLES=ON \
-DBUILD_opencv_python3=ON \
-DPYTHON_EXECUTABLE=/Users/abet/opt/miniconda3/envs/py39/bin/python \
-DPYTHON3_EXECUTABLE=/Users/abet/opt/miniconda3/envs/py39/bin/python \
-DPYTHON3_INCLUDE_DIRS=/Users/abet/opt/miniconda3/envs/py39/include/python3.9 \
-DPYTHON3_NUMPY_INCLUDE_DIRS=/Users/abet/opt/miniconda3/envs/py39/lib/python3.9/site-packages/numpy/core/include \
-DBUILD_JPEG_TURBO_DISABLE=ON
-DBUILD_TESTS=OFF
-DBUILD_ZLIB=OFF
CMakeCache.txtを開いて、ZLIB_INCLUDE_DIR:PATHとZLIB_LIBRARY_RELEASE:FILEPATHをbrewでインストールしたzlibのパスに書き換えます。
//Path to a file.
ZLIB_INCLUDE_DIR:PATH=/usr/local/Cellar/zlib/1.2.12/include/
//Path to a library.
ZLIB_LIBRARY_RELEASE:FILEPATH=/usr/local/Cellar/zlib/1.2.12/lib/libz.dylib
もう一度cmakeを実行すると標準出力にビルドの詳細が表示されますが、コンパイラがg++になっています。
-- C/C++:
-- Built as dynamic libs?: YES
-- C++ standard: 11
-- C++ Compiler: /usr/local/bin/g++ (ver 11.2.0) # コンパイラ
ビルドを行います。
make -j4
ここでビルドエラー。
make[2]: *** [modules/imgcodecs/CMakeFiles/opencv_imgcodecs.dir/src/apple_conversions.mm.o] Error 1
make[1]: *** [modules/imgcodecs/CMakeFiles/opencv_imgcodecs.dir/all] Error 2
make: *** [all] Error 2
Macではgcc使うなとアドバイスあり。
Structure From Motionを試す
opencv_contrib/modules/sfm/samples/data/imagesにサンプル画像があるので、これを使用します。Structure From Motionを実行して、被写体の点群とカメラの位置を取得します。
import cv2
import numpy as np
def main():
# カメラの内部パラメータに関する変数(キャリブレーションした値を入れる)
f = 1100.0 # 焦点距離
cx = 300.0 # 画像中心(x) pixel
cy = 500.0 # 画像中心(y) pixel
# 入力画像に関する変数
# 入力画像の数
NUM_IMG = 3
# 入力ファイル名のセット
image_files = []
for i in range(NUM_IMG):
image_files.append(f"./resized_IMG_{2889+i}.jpg")
# 内部パラメータ行列の生成
K = np.array([
[f, 0, cx],
[0, f, cy, ],
[0, 0, 1]
], dtype=np.float32)
# SfMモジュールを用いた複数の画像データからの3次元再構成(点群が計算される)s
is_projective = True
Rs_est, ts_est, K, points3d_estimated = cv2.sfm.reconstruct(
images=image_files, K=K, is_projective=is_projective)
print('shape---')
print('Rs_est:', len(Rs_est), Rs_est[0].shape) # num_images tuple of array(3, 3)
print('ts_est:', len(ts_est), ts_est[0].shape) # num_images tuple of array(3, 1)
print('K:', K.shape) # tuple of array(3, 3)
print('points3d_estimated:', len(points3d_estimated), points3d_estimated[0].shape) # num_point tuple of array(3, 1)
print(K)
# 結果の表示(Vizを使用する)
window = cv2.viz.Viz3d("Coordinate Frame")
window.setWindowSize(window_size=(1280, 720))
# 指定しないと背景は黒
window.setBackgroundColor(color=cv2.viz.Color().black())
# 推定された3次元位置をセット
point_cloud_est = []
for i in range(len(points3d_estimated)):
point_cloud_est.append(points3d_estimated[i].T)
point_cloud_est = np.array(point_cloud_est)
cloud_widget = cv2.viz.WCloud(point_cloud_est, cv2.viz.Color.white())
window.showWidget("point_cloud", cloud_widget)
# カメラ位置のセット
path = []
for i in range(len(Rs_est)):
camera_matrix = cv2.viz.Affine3d(Rs_est[i], ts_est[i]).mat().reshape(1, 16)
path.append(camera_matrix)
path = np.array(path)
trajectory_widget = cv2.viz.WTrajectory(
path=path,
display_mode=cv2.viz.PyWTrajectory_BOTH,
scale=0.2,
color=cv2.viz.Color.green()
)
window.showWidget("cameras_frames_and_lines", trajectory_widget)
frustums_widget = cv2.viz.WTrajectoryFrustums(path=path, K=K, scale=0.1, color=cv2.viz.Color.yellow())
window.showWidget("cameras_frustums", frustums_widget)
pose = cv2.viz.Affine3d(Rs_est[0], ts_est[0])
window.setViewerPose(pose)
window.spin()
if __name__ == "__main__":
main()
Pythonでのウィジェットの使い方はopencv_contrib/modules/viz/misc/python/test/test_viz_simple.pyのコードが参考になります。
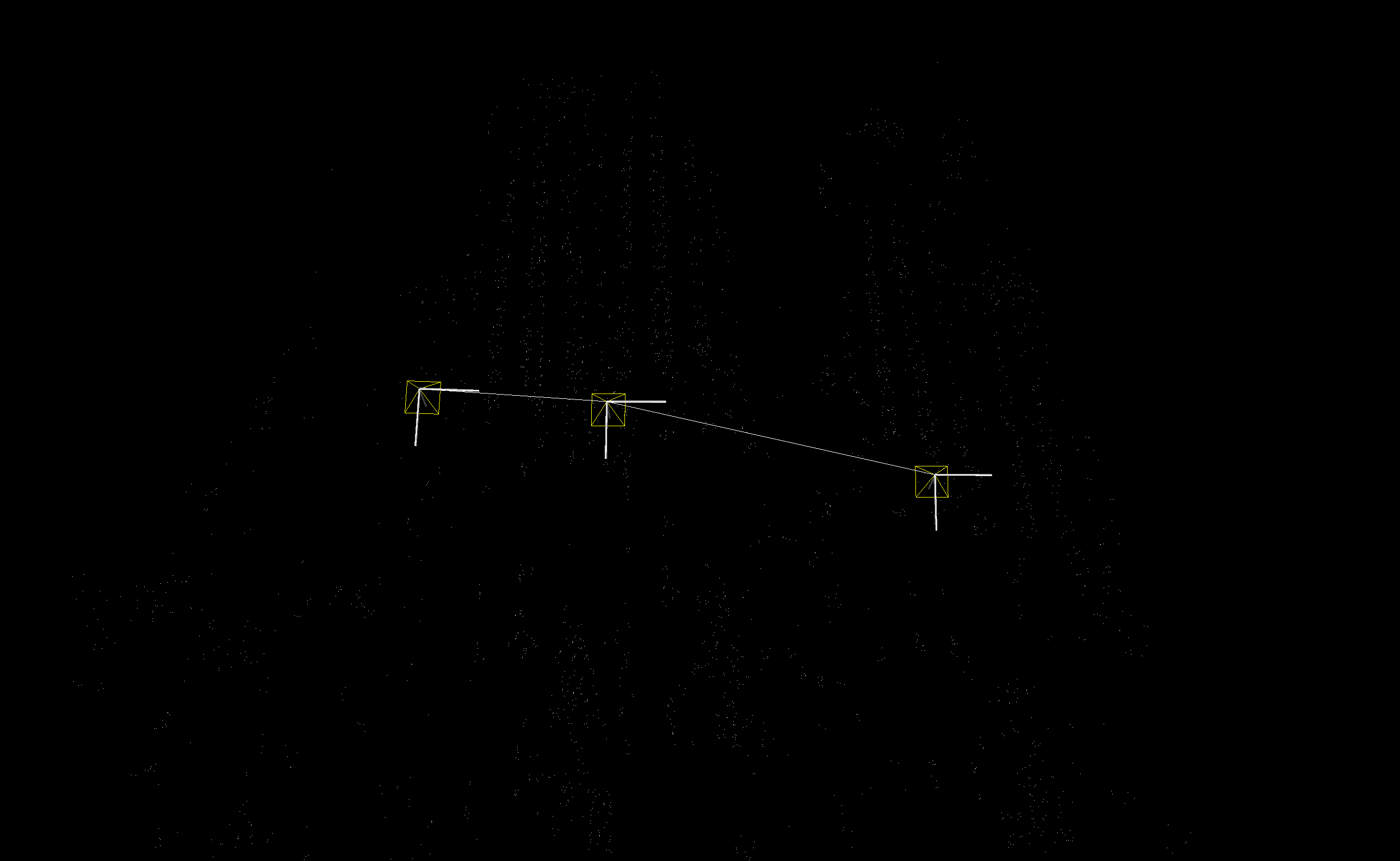
カメラと同じ視点の画像。
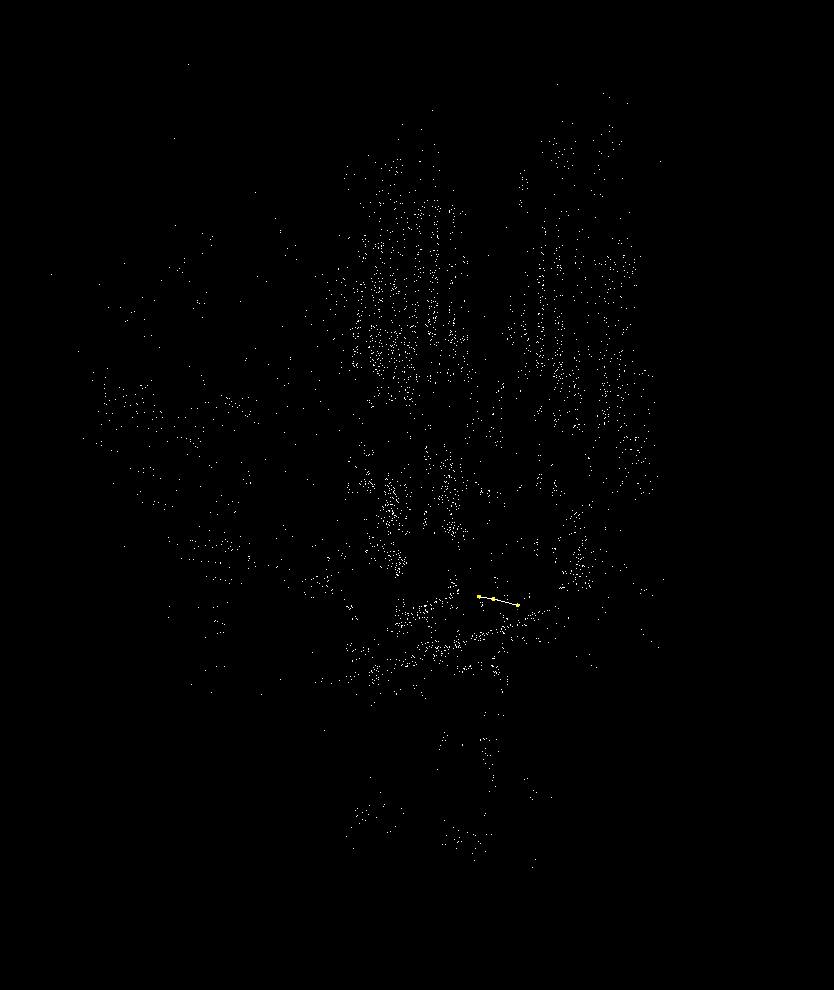
引きの視点の画像。
おわりに
PythonのOpenCVでStructure From Motionをするのはテクニカルすぎるので、OpenSfM
とかopenMVGを使ったほうがよさそうです。