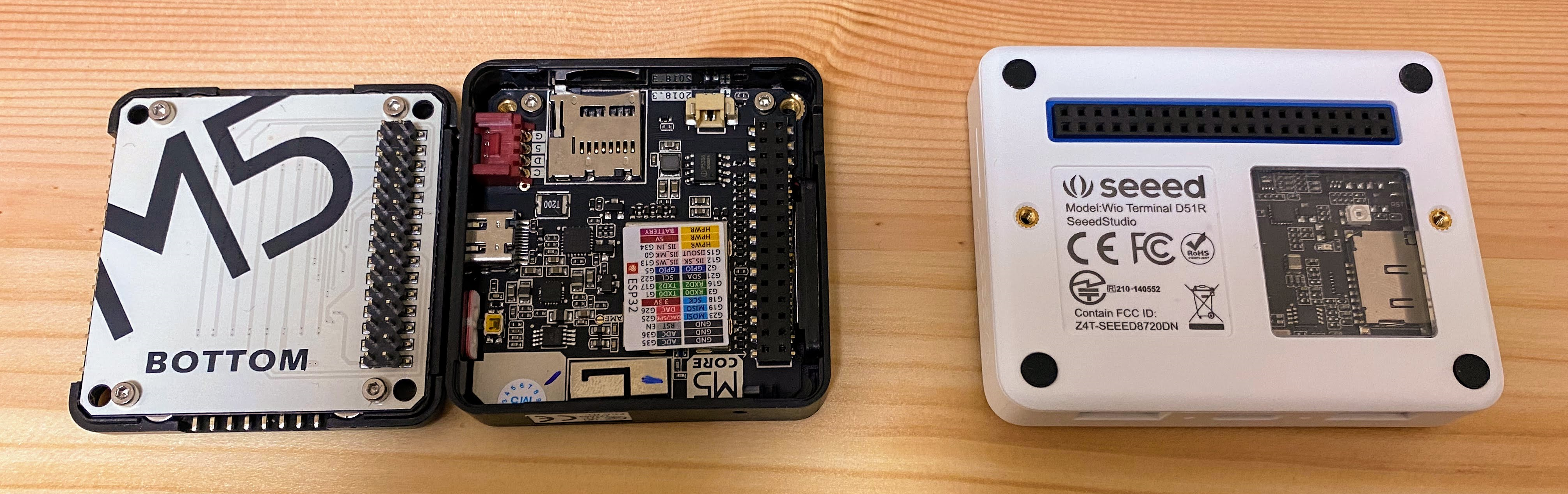
手元にM5Stack BasicとWio Terminalがそろったので、両デバイスの違いをまとめてみました。

外観
| M5Stack | Wio Terminal | |
|---|---|---|
| サイズ(mm) | w54 × h54 × d17 | w72 × h57 × d12 |
| 質量(g) | 120 | |
| LCD解像度 | 320 x 240 | 320 x 240 |
サイズはWio Terminalの方が横長、奥行きは少ないという仕様になっています。ただ、Wio Terminalの方は、バッテリーが付属されていないので、オプションを付けると、M5Stackと変わらない奥行きになると思います。(M5Stack Basicのバッテリー容量は110mAh)
両方とも、背面にはネジ穴があるため、壁掛けにも適しています。
また、M5Stack Basicは、本体を2つ(CoreとBottom)に分け、モジュール拡張するのに対し、Wio Terminalは、背面の40-Pin GPIO Headerに拡張モジュールを追加していく形となっています。
プロセッサー
| M5Stack | Wio Terminal | |
|---|---|---|
| プロセッサー | Espressif ESP32 | Microchip ATSAMD51P19 |
| クロック周波数 | 240MHz dual core | 120MHz (max 200MHz) |
| RAM | 520KB | 192KB |
| ROM | 512KB | |
| Wi-Fi | 802.11 b/g/n HT40 | 802.11 a/b/g/n |
| BLE | 5.0 | 5.0 |
| プロセッサの違いを姫野ベンチマークのアロケートサイズをカスタムし比較してみました。絶対評価はできませんが、M5StackがMFLOPS=54.076028に対し、Wio TerminalがMFLOPS=25.825812となりました。 |
処理速度比較サンプルコード
performance.c
# include <sys/time.h>
# define MIMAX 9
# define MJMAX 9
# define MKMAX 17
double second();
float jacobi();
void initmt();
double fflop(int,int,int);
double mflops(int,double,double);
static float p[MIMAX][MJMAX][MKMAX];
static float a[4][MIMAX][MJMAX][MKMAX],
b[3][MIMAX][MJMAX][MKMAX],
c[3][MIMAX][MJMAX][MKMAX];
static float bnd[MIMAX][MJMAX][MKMAX];
static float wrk1[MIMAX][MJMAX][MKMAX],
wrk2[MIMAX][MJMAX][MKMAX];
static int imax, jmax, kmax;
static float omega;
void setup() {
delay(3000);
Serial.begin(115200);
Serial.println("Ready");
int i,j,k,nn;
float gosa;
double cpu,cpu0,cpu1,flop,target;
target= 60.0;
omega= 0.8;
imax = MIMAX-1;
jmax = MJMAX-1;
kmax = MKMAX-1;
/*
* Initializing matrixes
*/
initmt();
Serial.printf("mimax = %d mjmax = %d mkmax = %d\n",MIMAX, MJMAX, MKMAX);
Serial.printf("imax = %d jmax = %d kmax =%d\n",imax,jmax,kmax);
nn= 3;
Serial.printf(" Start rehearsal measurement process.\n");
Serial.printf(" Measure the performance in %d times.\n\n",nn);
cpu0= second();
gosa= jacobi(nn);
cpu1= second();
cpu= cpu1 - cpu0;
flop= fflop(imax,jmax,kmax);
Serial.printf(" MFLOPS: %f time(s): %f %e\n\n",
mflops(nn,cpu,flop),cpu,gosa);
nn= (int)(target/(cpu/3.0));
Serial.printf(" Now, start the actual measurement process.\n");
Serial.printf(" The loop will be excuted in %d times\n",nn);
Serial.printf(" This will take about one minute.\n");
Serial.printf(" Wait for a while\n\n");
/*
* Start measuring
*/
cpu0 = second();
gosa = jacobi(nn);
cpu1 = second();
cpu= cpu1 - cpu0;
Serial.printf(" Loop executed for %d times\n",nn);
Serial.printf(" Gosa : %e \n",gosa);
Serial.printf(" MFLOPS measured : %f\tcpu : %f\n",mflops(nn,cpu,flop),cpu);
Serial.printf(" Score based on Pentium III 600MHz : %f\n",
mflops(nn,cpu,flop)/82,84);
}
void initmt()
{
int i,j,k;
for(i=0 ; i<MIMAX ; i++)
for(j=0 ; j<MJMAX ; j++)
for(k=0 ; k<MKMAX ; k++){
a[0][i][j][k]=0.0;
a[1][i][j][k]=0.0;
a[2][i][j][k]=0.0;
a[3][i][j][k]=0.0;
b[0][i][j][k]=0.0;
b[1][i][j][k]=0.0;
b[2][i][j][k]=0.0;
c[0][i][j][k]=0.0;
c[1][i][j][k]=0.0;
c[2][i][j][k]=0.0;
p[i][j][k]=0.0;
wrk1[i][j][k]=0.0;
bnd[i][j][k]=0.0;
}
for(i=0 ; i<imax ; i++)
for(j=0 ; j<jmax ; j++)
for(k=0 ; k<kmax ; k++){
a[0][i][j][k]=1.0;
a[1][i][j][k]=1.0;
a[2][i][j][k]=1.0;
a[3][i][j][k]=1.0/6.0;
b[0][i][j][k]=0.0;
b[1][i][j][k]=0.0;
b[2][i][j][k]=0.0;
c[0][i][j][k]=1.0;
c[1][i][j][k]=1.0;
c[2][i][j][k]=1.0;
p[i][j][k]=(float)(i*i)/(float)((imax-1)*(imax-1));
wrk1[i][j][k]=0.0;
bnd[i][j][k]=1.0;
}
}
float jacobi(int nn)
{
int i,j,k,n;
float gosa, s0, ss;
for(n=0 ; n<nn ; ++n){
gosa = 0.0;
for(i=1 ; i<imax-1 ; i++)
for(j=1 ; j<jmax-1 ; j++)
for(k=1 ; k<kmax-1 ; k++){
s0 = a[0][i][j][k] * p[i+1][j ][k ]
+ a[1][i][j][k] * p[i ][j+1][k ]
+ a[2][i][j][k] * p[i ][j ][k+1]
+ b[0][i][j][k] * ( p[i+1][j+1][k ] - p[i+1][j-1][k ]
- p[i-1][j+1][k ] + p[i-1][j-1][k ] )
+ b[1][i][j][k] * ( p[i ][j+1][k+1] - p[i ][j-1][k+1]
- p[i ][j+1][k-1] + p[i ][j-1][k-1] )
+ b[2][i][j][k] * ( p[i+1][j ][k+1] - p[i-1][j ][k+1]
- p[i+1][j ][k-1] + p[i-1][j ][k-1] )
+ c[0][i][j][k] * p[i-1][j ][k ]
+ c[1][i][j][k] * p[i ][j-1][k ]
+ c[2][i][j][k] * p[i ][j ][k-1]
+ wrk1[i][j][k];
ss = ( s0 * a[3][i][j][k] - p[i][j][k] ) * bnd[i][j][k];
gosa+= ss*ss;
/* gosa= (gosa > ss*ss) ? a : b; */
wrk2[i][j][k] = p[i][j][k] + omega * ss;
}
for(i=1 ; i<imax-1 ; ++i)
for(j=1 ; j<jmax-1 ; ++j)
for(k=1 ; k<kmax-1 ; ++k)
p[i][j][k] = wrk2[i][j][k];
} /* end n loop */
return(gosa);
}
double fflop(int mx,int my, int mz)
{
return((double)(mz-2)*(double)(my-2)*(double)(mx-2)*34.0);
}
double mflops(int nn,double cpu,double flop)
{
return(flop/cpu*1.e-6*(double)nn);
}
double second()
{
struct timeval tm;
double t ;
static int base_sec = 0,base_usec = 0;
gettimeofday(&tm, NULL);
if(base_sec == 0 && base_usec == 0)
{
base_sec = tm.tv_sec;
base_usec = tm.tv_usec;
t = 0.0;
} else {
t = (double) (tm.tv_sec-base_sec) +
((double) (tm.tv_usec-base_usec))/1.0e6 ;
}
return t ;
}
void loop() {}
外部インターフェース
| M5Stack | Wio Terminal | |
|---|---|---|
| USB | Type-C x1 | Type-C x1 |
| SD | microSDスロット x1 | microSDスロット x1 |
| GROVEコネクタ | x1 | x2 |
| I/Oピン | 23pin | 40pin(RaspberryPi互換) |
| ボタン | Button x3 | Button x3 / 5-way Switch x1 |
| 入力のボタンインターフェースとしてWio Terminalは3つのボタンに加え、5-way Switchと呼ばれる5方向のキーが付いていることが特徴的で、画面上のメニュー選択などのアプリケーションで使いやすさが出てくると思います。 |
内蔵センサ
Wio Terminalには、加速度センサ、照度センサ、赤外線エミッタが内蔵。M5Stack Basicではないのですが、M5Stack Grayという加速度、ジャイロ、磁気センサ(MPU9250)が搭載されたモデルもあります。
いずれにせよ、拡張モジュールもありますし、内蔵センサ自体はそれほど拘らなくてよさそうですね。
開発環境
| M5Stack | Wio Terminal |
|---|---|
| Arduino, MicroPython, UIFlow | Arduino, MicroPython, ArduPy, AT Firmware, Visual Studio Code |
| UIFlowは、M5Stick社の提供するブロック型のビジュアルプログラミングツール。 | |
| ArduPyは、AredinoとSeeedによって開発されたプログラミングツール。 | |
| どちらも、内部ではMicroPythonが動いているようです。 |
お役立ちサイト
M5Stack
Wio Terminal
