今回は、Structure From Motion (SfM) について
OpenCV(3.3.1) + SfMモジュールを使い、サンプルを実行してみました。
Structure From Motion (SfM) とは
Structure From Motion は、複数の画像から三次元形状を復元する手法になります。
https://en.wikipedia.org/wiki/Structure_from_motion
実行環境
・Ubuntu 16.04 LTS
・OpenCV 3.3.1
導入手順
SfMモジュール導入
参考)
https://docs.opencv.org/3.3.1/db/db8/tutorial_sfm_installation.html
要求されるパッケージをインストール
sudo apt-get install libeigen3-dev libgflags-dev libgoogle-glog-dev
無ければ Cmake もインストール
sudo apt-get install cmake
Ceres Solver ビルド&インストール
git clone https://ceres-solver.googlesource.com/ceres-solver
cd ceres-solver
mkdir build && cd build
cmake ..
make -j4
make test
sudo make install
OpenCV(3.3.1) + contrib 導入
参考)
https://docs.opencv.org/3.3.1/d7/d9f/tutorial_linux_install.html
要求されるパッケージをインストール
sudo apt-get install build-essential
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
チュートリアルに載っていないが必要なパッケージ(Viz)をインストール
sudo apt-get -y install libvtk5-dev
Git Repository から最新ソースコードを取得
cd ~/<my_working_directory>
git clone https://github.com/opencv/opencv.git
git clone https://github.com/opencv/opencv_contrib.git
OpenCV(3.3.1) + contrib ビルド&インストール
cd ./opencv
mkdir build
cd build
# cmake [<some optional parameters>] <path to the OpenCV source directory>
# オプション: OPENCV_EXTRA_MODULES_PATH=<path to opencv_contrib modules directory>
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local .. <path to the OpenCV source directory>
cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D OPENCV_EXTRA_MODULES_PATH=<path to opencv_contrib modules directory> ..
# make
# ジョブ数:8 (任意)
make -j8
# make install
sudo make install
サンプルコード実行
参考)
https://docs.opencv.org/3.3.1/d5/dab/tutorial_sfm_trajectory_estimation.html#gsc.tab=0
https://qiita.com/ChaoticActivity/items/178d23508b92a09e59ea
https://iwaki2009.blogspot.jp/2016/01/ubuntu-1404_7.html
trajectory_reconstruccion.cpp をコンパイル
cd <path to opencv_contrib directory>/modules/sfm/samples/
g++ -o trajectory_reconstruccion trajectory_reconstruccion.cpp `pkg-config --libs opencv` -I/usr/local/include -I/usr/include/eigen3 -DCERES_FOUND=1
※エラー対応メモ
・エラーケース1
/usr/local/include/opencv2/sfm/numeric.hpp:41:22: fatal error: Eigen/Core: No such file or directory
compilation terminated.
→ -I/usr/include/eigen3 オプション追加・エラーケース2
trajectory_reconstruccion.cpp: In function ‘int main(int, char**)’:
trajectory_reconstruccion.cpp:148:77: error: ‘reconstruct’ was not declared in this scope
reconstruct(points2d, Rs_est, ts_est, K, points3d_estimated, is_projective);
→ -DCERES_FOUND=1 オプション追加
Viz のパスを通す
- ライブラリのパスの確認する
ldd trajectory_reconstruccion
not found となっており、パスが通っていない・・
linux-vdso.so.1 => (0x0000~)
libopencv_sfm.so.3.3 => /usr/local/lib/libopencv_sfm.so.3.3 (0x0000~))
libopencv_viz.so.3.3 => not found
...
- libopencv_viz のパスを通す
# ファイル生成
cd /etc/ld.so.conf.d
touch opencv_viz.conf
ファイル生成後、opencv_viz.conf に /usr/local/lib を記載し保存し、
ldconf.cache を更新(※高速化のためキャッシュから読み出されるため)
# ldconf.cache 更新
ldconfig
パスを確認
ldconfig -p | grep opencv_viz
パスが通っている事が確認出来ました。
libopencv_viz.so.3.3 (libc6,x86-64) => /usr/local/lib/libopencv_viz.so.3.3
libopencv_viz.so (libc6,x86-64) => /usr/local/lib/libopencv_viz.so
trajectory_reconstruccion 実行
./trajectory_reconstruccion ./data/desktop_tracks.txt 1914 640 360
実行すると Viz が起動します。
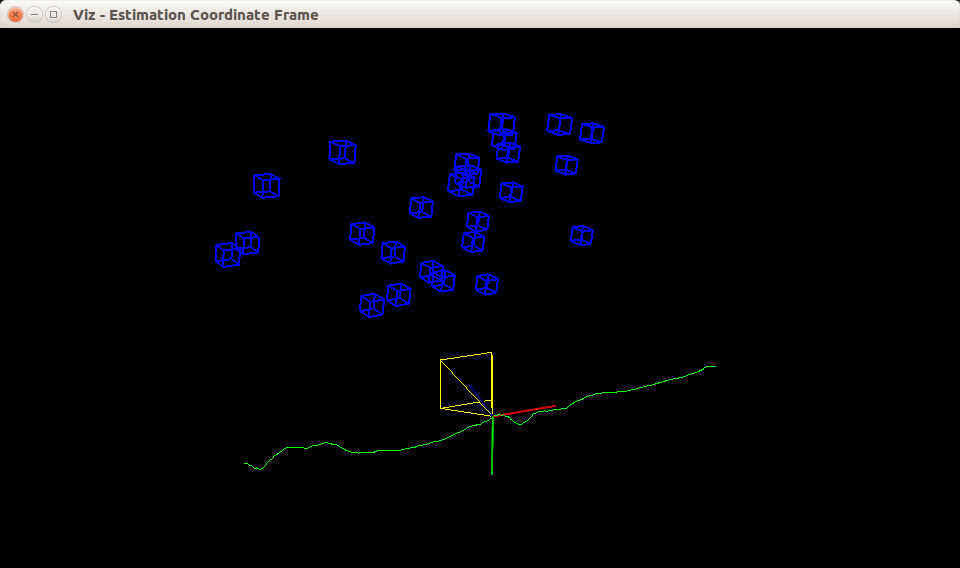
マウスで角度を変える事が出来る他、以下のキーが使えます。
| キー | 内容 |
|---|---|
| s | カメラ視点にスイッチ |
| q | 終了 |
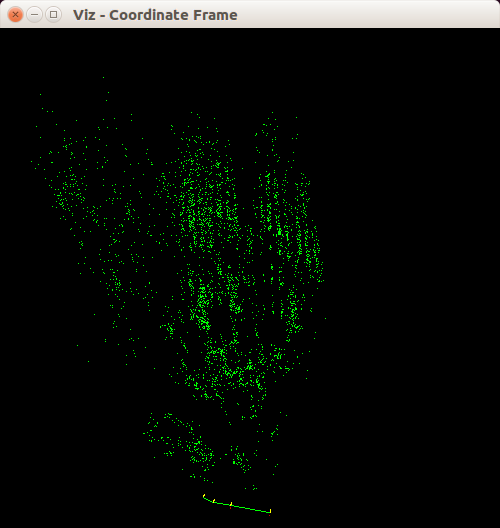
scene_reconstruction 実行
サクラダファミリアを撮影した4枚の画像から三次元情報を復元します。
※画像はこちらになります。
- コンパイル
g++ -o scene_reconstruction scene_reconstruction.cpp `pkg-config --libs opencv` -I/usr/local/include -I/usr/include/eigen3 -DCERES_FOUND=1
- 実行
./scene_reconstruction ./data/images/dataset_files.txt 350 240 360
Vizが起動し、サクラダファミリアの点群が表示されます。
下部の線の黄色い点はカメラでの撮影位置になっています。
| キー | 内容 |
|---|---|
| q | 終了 |
以上、Structure From Motion (SfM) として OpenCV(3.3.1) + SfMモジュールを試しました。