PIC32MX OV7670カメラ リアルタイム動画表示
随時、更新予定
24.11.11 ピン配表訂正
O
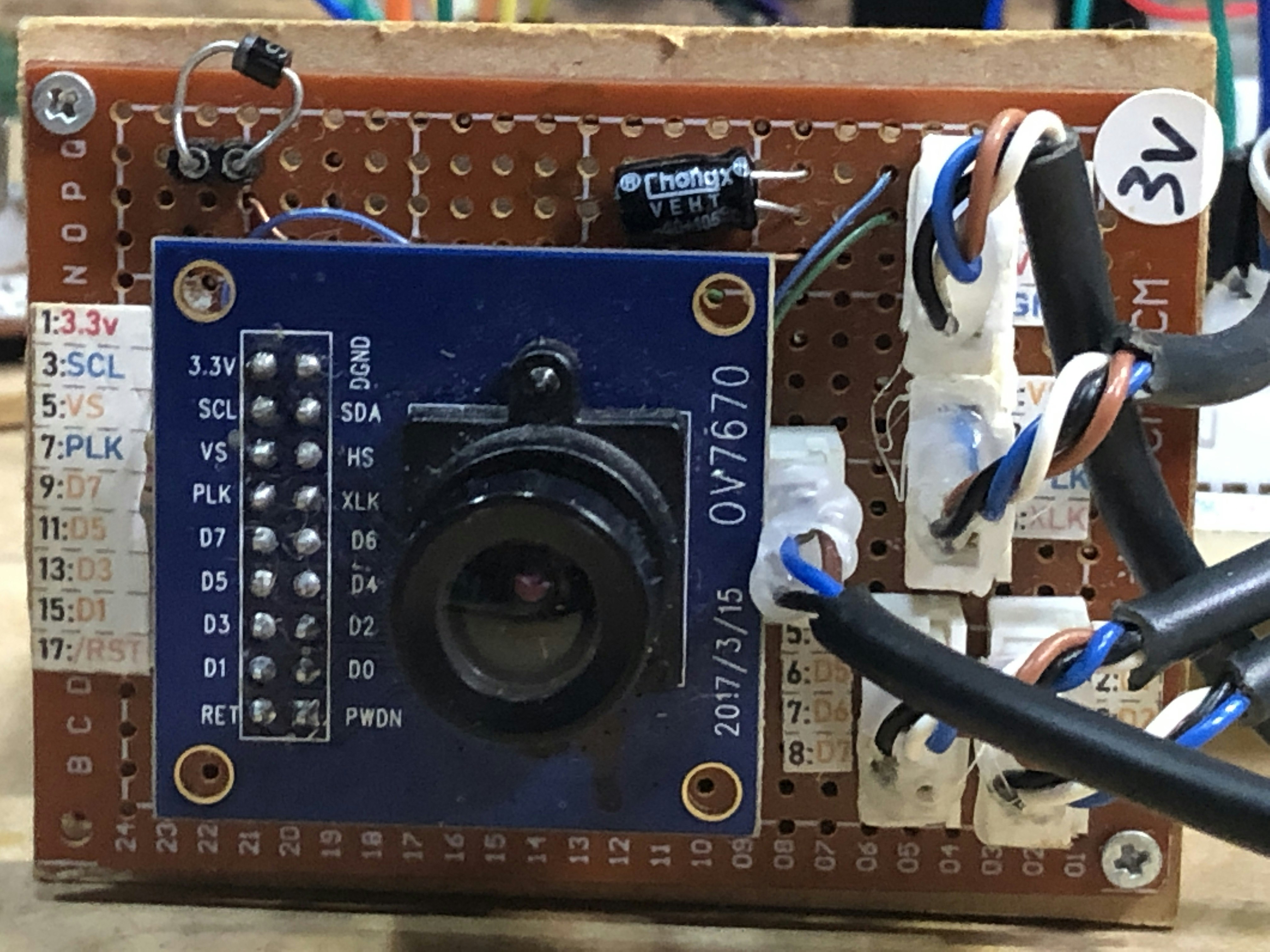

左:OV7670カメラ基板(コネクタ基板)
右:20Mhzクロック出力回路 74HC04と20Mhzのセラロックを使用して、カメラに入力。PIC32MXのREFCLKOを使用していたが、高速になると、出力が安定しなかったため。

液晶の大きさは、QQVGA 120×160ピクセル
基本配線図

OV7670とPIC32MXの接続。

プログラム構成の概略

カメラから3本の割り込み線が出力されます。垂直同期(行出力)、水平同期(ピクセル同期)、ページ同期。この三本の割り込みを、PIC32MXの外部割込みで取り込みます。PIC32MXのシステムクロックSYSCLKは96Mhzです。残像が残らない程度の速度で画像データを取り込むためには、DMAが必要です。ピクセル同期受信で取り込むデータをバッファに転送するためのDMA。ピクセルデータが行になったときに、行データをSPIを通じて、TFT液晶に転送するDMA、この2つのDMAを使用する必要があります。
コード
main.c
// PIC32MX370F512H Configuration Bit Settings
// 'C' source line config statements
// DEVCFG3
#pragma config USERID = 0xFFFF // Enter Hexadecimal value (Enter Hexadecimal value)
#pragma config FSRSSEL = PRIORITY_7 // Shadow Register Set Priority Select (SRS Priority 7)
#pragma config PMDL1WAY = OFF // Peripheral Module Disable Configuration (Allow multiple reconfigurations)
#pragma config IOL1WAY = OFF // Peripheral Pin Select Configuration (Allow multiple reconfigurations)
// DEVCFG2
#pragma config FPLLIDIV = DIV_2// PLL Input Divider (1x Divider)
#pragma config FPLLMUL = MUL_24 // PLL Multiplier (20x Multiplier)
#pragma config FPLLODIV = DIV_1 // System PLL Output Clock Divider (PLL Divide by 1)
// DEVCFG1
#pragma config FNOSC = FRCPLL // Oscillator Selection Bits (Fast RC Osc with PLL)
#pragma config FSOSCEN = OFF // Secondary Oscillator Enable (Disabled)
#pragma config IESO = OFF // Internal/External Switch Over (Disabled)
#pragma config POSCMOD = OFF // Primary Oscillator Configuration (Primary osc disabled)
#pragma config OSCIOFNC = OFF // CLKO Output Signal Active on the OSCO Pin (Disabled)
#pragma config FPBDIV = DIV_1 // Peripheral Clock Divisor (Pb_Clk is Sys_Clk/1)
#pragma config FCKSM = CSECMD // Clock Switching and Monitor Selection (Clock Switch Enable, FSCM Disabled)
#pragma config WDTPS = PS1048576 // Watchdog Timer Postscaler (1:1048576)
#pragma config WINDIS = OFF // Watchdog Timer Window Enable (Watchdog Timer is in Non-Window Mode)
#pragma config FWDTEN = OFF // Watchdog Timer Enable (WDT Disabled (SWDTEN Bit Controls))
#pragma config FWDTWINSZ = WINSZ_25 // Watchdog Timer Window Size (Window Size is 25%)
// DEVCFG0
#pragma config DEBUG = OFF // Background Debugger Enable (Debugger is Disabled)
#pragma config JTAGEN = OFF // JTAG Enable (JTAG Disabled)
#pragma config ICESEL = ICS_PGx2 // ICE/ICD Comm Channel Select (Communicate on PGEC2/PGED2)
#pragma config PWP = OFF // Program Flash Write Protect (Disable)
#pragma config BWP = OFF // Boot Flash Write Protect bit (Protection Disabled)
#pragma config CP = OFF // Code Protect (Protection Disabled)
// #pragma config statements should precede project file includes.
// Use project enums instead of #define for ON and OFF.
#include <xc.h>
#include <stdio.h>
#include <cp0defs.h>
#include <sys/attribs.h>
#include "peripheral.h"
#include "PIC32_I2C1driver.h"
#include "I2C_LCD.h"
#include "PIC32_SPI2.h"
#include "ds_MCP23S17.h"
#include "ds_ST7735S.h"
#include "PIC32_Graphics.h"
#include "PIC32_I2C2SCCB.h"
#include "OV7670_arCode.h"
#include "OV7670Camera.h"
void portInit(void)
{
TRISB=0x0000;
TRISC=0x0000;
TRISD=0x0000;
TRISE=0x0000;
TRISF=0x0000;
TRISG=0x0000;
ANSELB=0x0000;
ANSELC=0x0000;
ANSELD=0x0000;
ANSELE=0x0000;
ANSELF=0x0000;
ANSELG=0x0000;
PORTB=0x0000;
PORTC=0x0000;
PORTD=0x0000;
PORTE=0x0000;
PORTF=0x0000;
PORTG=0x0000;
}
void main(void)
{
uint8_t val8;
int i,j;
int k;
uint32_t address;
unsigned int tmp_CP0_Status; // Temporary register for CP0 reg storing
//oscillator init---------------------------------
SYSKEY = 0x0; // ensure OSCCON is locked
SYSKEY = 0xAA996655; // Write Key1 to SYSKEY
SYSKEY = 0x556699AA; // Write Key2 to SYSKEY
//PLL Output Divisor bits
OSCCONbits.PLLODIV=0b000; //000 = PLL output divided by 1
//PeripheralBusClock diviser.
OSCCONbits.PBDIV=0b000; //SYSCLK divided by1
//OSCCONbits.PLLMULT = 0b000;
//Reference clock out カメラに供給するクロック
//セラロック+74HC04 20Mhzを使用。
//#define referenceCLK
#ifdef referenceCLK
RPD9Rbits.RPD9R = 0b0011; //RD9:REFCLKO
REFOCONbits.RODIV=2;
REFOTRIMbits.ROTRIM = 0x0;//96Mhz/(2*2)Mhz=24Mhz
//実際は、リファレンスクロックの波形が歪んで12Mhzに低下する。
//REFOTRIMbits.ROTRIM = 0x100;//96Mhz/(2*2.5)=19.2Mhz
REFOCONbits.OE=1;
REFOCONbits.ON=1;
while(REFOCONbits.DIVSWEN);
#endif
SYSKEY = 0x0; // ensure OSCCON is locked
//port init---------------------------------------
portInit();//汎用ポート初期化
externalInputInit();//外部入力割込み初期化
//peripheral initializing-------------------------
//timer1Init();
timer2Init();//DMA2トリガーとして使用。
usartInit();//シリアル通信初期化
__delay_ms(10);//これを入れないとazが出力されない。
//putchar('a');putchar('z');
I2C1_Init();//I2C1モジュール初期化
LCD_Init(LcdDeviceAdd);
//I2C1BRG=0x003D;//600khz Fp=80Mhz
LCD_Printf(LcdDeviceAdd,"PIC32MX370F512F",15,0x80);
//Camera--------------------------------------------
I2C2_Init();//SCCB for OV7670
camInit();//カメラ初期化
cammode_select();//カメラ 画面大きさ、RGB565、クロック処理
//Camera initialized values confirming.
printf("AD: +0 +1 +2 +3 +4 +5 +6 +7 +8 +9 +A +B +C +D +E +F\r00:");
for(i=0x00; i<0xCA; i++)
{
val8=I2C2_b1Read(OV7670deviceAdd,i,true);
printf(" %02X",val8);
if((i+1)%16==0 && i!=0)
{
printf("\r%02X:",i+1);
}
}
printf("\r");
//Camera user value initializing--------------------
OV7670_Init();
//ST7735液晶初期化-----------------------------------
Spi2Init();
ST7735S_Init();
__delay_ms(100);
ST7735S_PaintALL(0xFF,0xFF,0xFF);
//DMA初期化--------------------------------------
DMA2Init();//for TFT LCD with SPI
DMA1Init();//for pixceldata
//ST7735液晶用RAM画面クリア(灰色)
k=0;
for(i=0; i<128; i++)
for(j=0; j<160; j++)
{
sprite1[k++]=0x70;
sprite1[k++]=0x70;
sprite1[k++]=0x70;
}
//interrupt initializing-------------------------
//printf("\nPIC32MX370F512HT\n");
//割り込み関連初期化
address=_CP0_GET_EBASE();//例外ベクタアドレス
printf("EBASE=%lx\n",address);
INTCONbits.MVEC=1;
tmp_CP0_Status=_CP0_GET_STATUS();
tmp_CP0_Status|=0x00000001;//CP0.STATUS.IE=1で割り込み許可
_CP0_SET_STATUS(tmp_CP0_Status);
// __builtin_enable_interrupts();
while(1)
{
/*if(rxU1.completed)
{
rxU1.completed=false;
printf("%s\r",rxU1.buf);
rxU1.length=0;
IEC1bits.U1RXIE=1;
}*/
}
return;
}
Peripheral.h
#ifndef PERIPHERAL_H
#define PERIPHERAL_H
#ifdef __cplusplus
extern "C" {
#endif
#include <xc.h>
#include <cp0defs.h>
#include <sys/attribs.h>
#include <stdio.h>
#include <stdbool.h>
#include <sys/kmem.h>
#define SYSCLK 96000000L // System clock 40Mhz
#define CTCLK (SYSCLK / 2) // CoreTimerCLK SystemClock/2
#define CTus (CTCLK / 1000000) // us delay unit Term
#define CTms (CTCLK / 1000) // ms delay unit Term
#define High 1
#define Low 0
//USART-----------------------------------
#define BAUDRATE 115200
#define SET_SPBRG_DATA (((unsigned int)((SYSCLK/4)/BAUDRATE))-1)
#define SET_SPBRG_DATA1 (((unsigned int)((SYSCLK/16)/BAUDRATE))-1)
#define RXUSART_BUFFER_SIZE 50
typedef struct
{
uint8_t buf[RXUSART_BUFFER_SIZE];
uint8_t length;
uint8_t completed;
uint8_t ch;
}_rxUsart;
extern volatile _rxUsart rxU1;
extern void usartInit(void);
extern uint8_t getch(void);
extern void myUsartPrint(uint8_t *txBuf, uint8_t _length);
//Timer-----------------------------------------------
typedef struct{
uint32_t cnt;
bool fg;
bool fg1;
}_tm;
extern _tm tm1;
extern void timer1Init(void);
extern void timer2Init(void);
//External Interrupt-----------------------------------
typedef struct{
bool fg;
}_exINT;
extern _exINT exINT0,exINT1,exINT2;
void externalInputInit(void);
//Delay------------------------------------------------
extern void __delay_ms(long _ms);
extern void __delay_us(long _us);
//DMA---------------------------------------------------
extern void DMA2Init(void);
extern void DMA1Init(void);
#ifdef __cplusplus
}
#endif
#endif /* PERIPHERAL_H */
Peripheral.c
#include "peripheral.h"
#include "PIC32_Graphics.h"
//USART---------------------------------------------------
//USART受信用構造体
volatile _rxUsart rxU1;
/**
* usart初期化関数
*/
void usartInit(void)
{
//1.ボーレート設定115200
U1BRG=SET_SPBRG_DATA1;
//2.Serial mode setting
U1RXREG=0x0000;
U1TXREG=0x0000;
U1MODEbits.PDSEL=0b00;//8bits no parity
U1MODEbits.STSEL=1;//1stopbits
//PPS
SYSKEY = 0x0; // ensure OSCCON is locked
SYSKEY = 0xAA996655; // Write Key1 to SYSKEY
SYSKEY = 0x556699AA; // Write Key2 to SYSKEY
RPC13Rbits.RPC13R=0b0011; //RPC13:U1TX
U1RXR=0b0111; //RPC14:U1RX
SYSKEY = 0x0; // ensure OSCCON is locked
//Rx interrupt
IFS1bits.U1RXIF=0;
IPC7bits.U1IP=1;
IPC7bits.U1IS=1;
IEC1bits.U1RXIE=1;
U1STAbits.URXISEL=0b00;//not empty
//IO direction change
TRISC=0x0000;
TRISCbits.TRISC14=1; //Input For U1RX.
rxU1.length=0;
//4.Serial port enabled
U1STAbits.URXEN=1;
U1STAbits.UTXEN=1;
U1MODEbits.ON=1;
}
/**
* 32-Bit Language Tools Libraries P.38
* Description: Writes a character to stdout.
* printf文で使用。
* @param c 出力1文字
*/
void _mon_putc (char c)
{
while (U1STAbits.UTXBF); //Wait till transmission is complete
U1TXREG = c;
}
/**
* usart 文字入力受信関数
* @return 受信文字
*/
uint8_t getch(void)
{
while(!U1STAbits.URXDA)
return U1RXREG;
}
//タイマー------------------------------------------
_tm tm1;
/**
*Timer1初期化
*/
void timer1Init(void)
{
T1CON=0x00;
TMR1=0x0000;
//PR1=0x1388;//PBCLK=40Mhz
PR1=0x2710;//PBCLK=80Mhz
T1CONbits.TCKPS=0b01; //1:8
T1CONbits.ON=1;
IFS0bits.T1IF=0;
IPC1bits.T1IP=1;
IPC1bits.T1IS=0;
IEC0bits.T1IE=1;
}
//Fpb=80Mhz 0.025us * 2 * 10 = 0.5us
void timer2Init(void)
{
T2CON=0x00;
TMR2=0x00;
PR2=0x000F;
T2CONbits.T32=0;//16bitsTimer
T2CONbits.TCKPS=0b001;//1:2 prescale
T2CONbits.TCS=0;//internal peripheral clock
IFS0bits.T2IF=0;
IPC2bits.T2IP=1;
IPC2bits.T2IS=0;
IEC0bits.T2IE=0;
T2CONbits.ON=0;
}
//Exteranl interrupt---------------------------------
_exINT exINT0,exINT1,exINT2;
void externalInputInit(void)
{
//INT0 initialize
INTCONbits.INT0EP=1;//0:Falling edge 1:Rising edge
IEC0bits.INT0IE=1;
IPC0bits.INT0IP=7;
TRISFbits.TRISF6=1;
CNPUFbits.CNPUF6=1;
exINT0.fg=false;
//INT1,2 initilize
//PPS
INT1Rbits.INT1R = 0b0000;//INT1:RD1
INT2Rbits.INT2R = 0b0100;//INT2:RD4
INTCONbits.INT1EP = 1;//0:Falling edge 1:Rising edge
INTCONbits.INT2EP = 1;//0:Falling edge 1:Rising edge
IEC0bits.INT1IE =1;
IEC0bits.INT2IE =1;
IPC1bits.INT1IP = 7;
IPC2bits.INT2IP = 7;
TRISDbits.TRISD1=1;
TRISDbits.TRISD4=1;
CNPUFbits.CNPUF1=1;
CNPUFbits.CNPUF4=1;
exINT1.fg=false;
exINT2.fg=false;
IFS0bits.INT0IF=0;
IFS0bits.INT1IF=0;
IFS0bits.INT2IF=0;
}
//ディレイ--------------------------------------------
/**
* __delay_ms
* @param _ms
*/
void __delay_ms(long _ms)
{
long count;
count=_ms*CTms;
_CP0_SET_COUNT(0);
while(_CP0_GET_COUNT()<=count);
}
/**
* __delay_us
* @param _us
*/
void __delay_us(long _us)
{
long count;
count=_us*CTus;
_CP0_SET_COUNT(0);
while(_CP0_GET_COUNT()<=count);
}
//DMA2-------------------------------------------------
//sprite1からSPI2へ転送
void DMA2Init(void)
{
IEC2bits.DMA2IE = 0; // 設定のためDMA2を一時停止させる
DCH2CON = 0;
DCH2ECON = 0;
DCH2INT = 0;
DCH2CONbits.CHPRI = 3; // DMAチャネルの優先度(3)
DCH2ECONbits.CHSIRQ = _TIMER_2_IRQ; // DMAを開始する割り込み番号
DCH2ECONbits.SIRQEN = 1; // 割り込みによる転送を有効にする
DCH2INTbits.CHBCIE = 1; // Channel Block Transfer Complete Interrupt Flag bit
DCH2SSA = KVA_TO_PA(&sprite1);
//DCH2SSIZ = 128*160*3;
DCH2SSIZ = 160*2;
DCH2DSA = KVA_TO_PA(&SPI2BUF);
DCH2DSIZ = 1;
DCH2CSIZ = 1;
IFS2bits.DMA2IF = 0; // 割り込みフラグのクリア
IPC11bits.DMA2IP = 7; // 割り込み優先度
IPC11bits.DMA2IS = 3; // 副割り込み優先度
IEC2bits.DMA2IE = 1; // DMA2割り込みを有効にする
DCH2CONbits.CHEN = 1; // DMA1を使用する
DMACONbits.ON = 1; // DMAモジュールを有効にする
}
//DMA1-------------------------------------------------
//PORTEからsprite1へ転送
void DMA1Init(void)
{
IEC2bits.DMA1IE = 0; // 設定のためDMA2を一時停止させる
DCH1CON = 0;
DCH1ECON = 0;
DCH1INT = 0;
DCH1CONbits.CHPRI = 3; // DMAチャネルの優先度(3)
DCH1ECONbits.CHSIRQ = _EXTERNAL_1_IRQ; // DMAを開始する割り込み番号
DCH1ECONbits.SIRQEN = 1; // 割り込みによる転送を有効にする
DCH1INTbits.CHDDIE = 1; // Channel Block Transfer Complete Interrupt Flag bit
DCH1SSA = KVA_TO_PA(&PORTE);
DCH1SSIZ = 1;
DCH1DSA = KVA_TO_PA(&sprite1);
DCH1DSIZ = 160*2;
DCH1CSIZ = 1;
IFS2bits.DMA1IF = 0; // 割り込みフラグのクリア
IPC10bits.DMA1IP = 7; // 割り込み優先度
IPC10bits.DMA1IS = 3; // 副割り込み優先度
IEC2bits.DMA1IE = 1; // DMA2割り込みを有効にする
DCH1CONbits.CHEN = 1; // DMA1を使用する
DMACONbits.ON = 1; // DMAモジュールを有効にする
}
interrupt.h
#ifndef INTERRUPT_H
#define INTERRUPT_H
#ifdef __cplusplus
extern "C" {
#endif
#include <xc.h>
#include <cp0defs.h>
#include <sys/attribs.h>
#include <sys/attribs.h>
#include "peripheral.h"
extern void __ISR(_TIMER_1_VECTOR) ISR_Timer1(void);
extern void __ISR(_UART_1_VECTOR) ISR_UART1(void);
extern void __ISR(_EXTERNAL_2_VECTOR, IPL7AUTO) ISR_INT2(void);
extern void __ISR(_EXTERNAL_0_VECTOR, IPL7AUTO) ISR_INT0(void);
extern void __ISR(_EXTERNAL_1_VECTOR, IPL7AUTO) ISR_INT1(void);
extern void __ISR(_DMA2_VECTOR, IPL7AUTO) ISR_Dma2(void);
extern void __ISR(_DMA1_VECTOR, IPL7AUTO) ISR_Dma1(void);
#ifdef __cplusplus
}
#endif
#endif /* INTERRUPT_H */
interrupt.c
#include <proc/p32mx370f512h.h>
#include "interrupt.h"
#include "PIC32_Graphics.h"
#include "OV7670Camera.h"
//Timer1 interrupt
void __ISR(_TIMER_1_VECTOR,IPL1AUTO) ISR_Timer1(void)
{
IFS0bits.T1IF=0;
tm1.cnt++;
if(tm1.cnt%5==0)
{
tm1.fg1=true;
}
if(tm1.cnt==500)
{
tm1.cnt=0;
tm1.fg=true;
IEC0bits.T1IE=0;
//LATBbits.LATB0=~LATBbits.LATB0;
}
}
//USART1 RX interrupt
void __ISR(_UART_1_VECTOR,IPL1AUTO) ISR_UART1(void)
{
if( IFS1bits.U1RXIF==1)
{
IFS1bits.U1RXIF=0;
if(U1STAbits.URXDA)
{
do{
rxU1.ch=U1RXREG;
rxU1.buf[rxU1.length]=rxU1.ch;
rxU1.length++;
if(rxU1.length>=RXUSART_BUFFER_SIZE)
{
rxU1.length=0;
}
}while(U1STAbits.URXDA);
if(rxU1.ch==0x0a && rxU1.length>=3)//0x0a:'\n'
{
//rxUsart.buf[rxUsart.length-2]='\0';//\a\n終端文字FromPC
rxU1.buf[rxU1.length-2]=0x00;//\a\n終端文字FromPC
rxU1.completed=true;
IEC1bits.U1RXIE=0;
}
}
}
}
//VSYNC割込み INT2:RD4
void __ISR(_EXTERNAL_2_VECTOR, IPL7AUTO) ISR_INT2(void)
{
LATBbits.LATB2 = ~LATBbits.LATB2;
IFS0bits.INT2IF=0;
OV7670.LineCounter=0;
OV7670.HpixCounter=0;
}
//HREF割込み INT0:RF6
void __ISR(_EXTERNAL_0_VECTOR, IPL7AUTO) ISR_INT0(void)
{
IFS0bits.INT0IF=0;
if(INTCONbits.INT0EP==1)
{//立上り割込み処理
LATBbits.LATB0=1;
INTCONbits.INT0EP=0;//立下り待ちにする。
OV7670.LineCounter++;
if(OV7670.LineCounter==120)
{
OV7670.LineCounter=0;
}
//printf("%d ", OV7670.HpixCounter);
OV7670.HpixCounter=0;
}else
{//立下り割込み処理
INTCONbits.INT0EP=1;//立上り待ちにする。
//SPIでTFTに転送するフラグを立てる。
//OV7670.fg_TFT_Send = true;
//pushSprite();
LATBbits.LATB0=0;
}
}
//PCLK割込み INT1:RD1
void __ISR(_EXTERNAL_1_VECTOR, IPL7AUTO) ISR_INT1(void)
{
IFS0bits.INT1IF=0;
LATBbits.LATB1=~LATBbits.LATB1;
//OV7670.portBval = (uint8_t)PORTE;
//sprite1[OV7670.HpixCounter++]=OV7670.portBval;
//sprite1[OV7670.HpixCounter++]=PORTE;
}
//DMA2
//トリガー:Timer2
//from sprite1 to SPI2BUF
//sprite1 size:160*2
//SPI2BUF size:1
void __ISR(_DMA2_VECTOR, IPL7AUTO) ISR_Dma2(void)
{
IFS2bits.DMA2IF = 0; // DMA1割り込みフラグのクリア
if(DCH2INTbits.CHBCIF == 1)
{
SPI2_Stop();
T2CONbits.ON=0;
//LATBbits.LATB1=~LATBbits.LATB1;
DCH2SSA = KVA_TO_PA(&sprite1);
DCH2CONbits.CHEN = 1; // DMA1を有効にする
DCH2INTbits.CHBCIF = 0; // ブロック終了割り込みフラグのクリア
DCH2ECONbits.SIRQEN = 1;
}
}
//DMA1
//トリガー:外部割込み1 INT1
//from PORTE(size 1)
//to sprite1(size160*2)
void __ISR(_DMA1_VECTOR, IPL7AUTO) ISR_Dma1(void)
{
IFS2bits.DMA1IF=0;
if(DCH1INTbits.CHDDIF==1)
{
DCH1INTbits.CHDDIF=0;
pushSprite();
DCH1DSA = KVA_TO_PA(&sprite1);
DCH1CONbits.CHEN=1;
}
}
I2C2_SCCB.h
#ifndef PIC32_I2C2_H
#define PIC32_I2C2_H
#ifdef __cplusplus
extern "C" {
#endif
#include <xc.h>
#include <cp0defs.h>
#include <sys/attribs.h>
#include <stdio.h>
#include <stdbool.h>
//デバイスアドレス
#define MCP4726DeviceAdd 0xC0
#define I2C2_Ack 0//SSP1CON2.ACKDT master:receive mode
#define I2C2_NoAck 1//SSP1CON2.ACKDT master:receive mode
#define I2C2_SCL_PIN PORTFbits.RF5
#define I2C2_SDA_PIN PORTFbits.RF4
extern void I2C2_Init(void);
extern void I2C2_Reset(void);
extern bool I2C2_CheckIdle(void);
extern bool I2C2_ClearIF(bool _sccb);
extern bool I2C2_Start(bool _sccb);
extern bool I2C2_ReStart(void);
extern bool I2C2_Stop(bool _sccb);
extern bool I2C2_Tx_Buffer_Write(uint8_t _data);
extern uint8_t I2C2_Rx_Buffer_Read(void);
extern bool I2C2_Wait_Ack(bool _sccb);
extern bool I2C2_Send_Ack(uint8_t _Ack_Nack);
extern uint8_t I2C2_DataBuffer[10];
//------------------------------------------------------------------------
extern uint8_t I2C2_b1Write(uint8_t _device_add, uint8_t _data,bool _sccb);
extern uint8_t I2C2_b2Write(uint8_t _device_add, uint8_t _data1, uint8_t _data2,bool _sccb);
extern bool I2C2_bnWrite(uint8_t _device_add, uint8_t *_data, uint8_t _len,bool _sccb);
extern uint8_t I2C2_b1Read(uint8_t _device_add, uint8_t _data1,bool _sccb);
extern bool I2C2_bnRead(uint8_t _device_add, uint8_t _data1,uint8_t _len,bool _sccb);
#ifdef __cplusplus
}
#endif
#endif /* PIC32_I2C2 */
I2C2_SCCB.c
//
//220812 b1Read最後のNack修正。
#include "PIC32_I2C2SCCB.h"
#include "peripheral.h"
uint8_t I2C2_DataBuffer[10];
void I2C2_Init(void)
{
unsigned int i;
I2C2CON=0x0000;
//I2C2BRG=0x002F;//400kHz Fp=40Mhz
I2C2BRG=0x0189;//100khz Fp=80Mhz
I2C2CONbits.DISSLW=1;//errata
I2C2CONbits.STREN=1;
I2C2CONbits.ON=1;
IFS1bits.I2C2MIF=0;
IEC1bits.I2C2MIE=0;
IFS1bits.I2C2SIF=0;
IEC1bits.I2C2SIE=0;
}
void I2C2_Reset(void)
{
unsigned int buf;
I2C2CONbits.I2CEN=0;
buf=TRISB;
buf|=0x0000;
I2C2_SCL_PIN=0;
__delay_us(10);
I2C2_SCL_PIN=1;
__delay_us(10);
I2C2_SCL_PIN=0;
__delay_us(10);
I2C2_SCL_PIN=1;
__delay_us(10);
}
bool I2C2_CheckIdle(void)
{
signed int i;
unsigned int buf;
for(i=0x7FFF; i; i--)
{
buf=I2C2CON;
//buf&=0x44DB;
buf&=0x001F;
if(!buf)
return true;
}
return false;
}
bool I2C2_ClearIF(bool _sccb)
{
signed int i;
for(i=0x3FFF; i; i--)
{
if(IFS1bits.I2C2MIF)
{
IFS1bits.I2C2MIF=0;
return true;
}
}
return false;
}
bool I2C2_Start(bool _sccb)
{
signed int i;
for(i=0x3FFF; i; i--)
{
if(I2C2_CheckIdle())
{
I2C2CONbits.SEN=1;
if(I2C2_ClearIF(_sccb));
return true;
}
}
return false;
}
bool I2C2_ReStart(void)
{
//restart
signed int i;
for(i=0x3FFF; i; i--)
{
if(I2C2_CheckIdle())
{
I2C2CONbits.RSEN=1;
return true;
}
}
return false;
}
bool I2C2_Stop(bool _sccb)
{
signed int i;
for(i=0x3FFF; i; i--)
{
if(I2C2_CheckIdle())
{
I2C2CONbits.PEN=1;
while(I2C2CONbits.PEN);
if(I2C2_ClearIF(_sccb))
return true;
}
}
return false;
}
//I2C2 transmit register write
//TBS: 0:empty 1:I2C2TRN full
bool I2C2_Tx_Buffer_Write(uint8_t _data)
{
signed int i,j;
if(!I2C2_CheckIdle())return false;
I2C2TRN=_data;
for(i=0x7FFF; i; i--)
{
if(!I2C2STATbits.TBF)
{
return true;
}
}
return false;
}
uint8_t I2C2_Rx_Buffer_Read(void)
{
uint8_t ret,cnt;
ret=0xFF;
cnt=0;
if(!I2C2_CheckIdle())return false;
I2C2CONbits.RCEN=1;
while(!I2C2STATbits.RBF){
__delay_us(3);
cnt++;
if(cnt==200)return false;
};
if(!I2C2_CheckIdle())return false;
ret = I2C2RCV;
return ret;
}
//ACKSTAT 0:ACK 1:NACK
bool I2C2_Wait_Ack(bool _sccb)
{
signed int i;
if(_sccb)return true;
for(i=0x7FFF; i; i--)
{
if(!I2C2STATbits.ACKSTAT)
return true;
}
return false;
}
bool I2C2_Send_Ack(uint8_t _Ack_Nack)
{
if(!I2C2_CheckIdle())return false;
I2C2CONbits.ACKDT=_Ack_Nack;
I2C2CONbits.ACKEN=1;
return true;
}
//------------------------------------------------------------------------
uint8_t I2C2_b1Write(uint8_t _device_add, uint8_t _data,bool _sccb)
{
//start condition
I2C2_Start(_sccb);
//send device address
I2C2_Tx_Buffer_Write(_device_add);
if(!I2C2_Wait_Ack(_sccb))
return 0xE1;
if(!I2C2_ClearIF(_sccb))
return 0xE2;
//send data
I2C2_Tx_Buffer_Write(_data);
if(!I2C2_Wait_Ack(_sccb))
return 0xE3;
if(!I2C2_ClearIF(_sccb))
return 0xE4;
//Stop condition
I2C2_Stop(_sccb);
return true;
}
bool I2C2_bnWrite(uint8_t _device_add, uint8_t *_data, uint8_t _len, bool _sccb)
{
uint8_t buf;
//start condition
I2C2_Start(_sccb);
//send device address
I2C2_Tx_Buffer_Write(_device_add);
if(!I2C2_Wait_Ack(_sccb))
return false;
if(!I2C2_ClearIF(_sccb))
return false;
//send data
do{
buf=*_data;
I2C2_Tx_Buffer_Write(buf);
if(!I2C2_Wait_Ack(_sccb))
return false;
if(!I2C2_ClearIF(_sccb))
return false;
_data++;
_len--;
}while(_len!=0);
//Stop condition
I2C2_Stop(_sccb);
return true;
}
uint8_t I2C2_b2Write(uint8_t _device_add, uint8_t _data1, uint8_t _data2, bool _sccb)
{
//start condition
I2C2_Start(_sccb);
//send device address-----------------
I2C2_Tx_Buffer_Write(_device_add);
I2C2_Send_Ack(I2C2_Ack);
if(!I2C2_ClearIF(_sccb))
{
return 0x42;
}
//send data1------------------------
I2C2_Tx_Buffer_Write(_data1);
I2C2_Send_Ack(I2C2_Ack);
if(!I2C2_ClearIF(_sccb))
return 0x44;
//send data
//send data2------------------------
I2C2_Tx_Buffer_Write(_data2);
I2C2_Send_Ack(I2C2_Ack);
if(!I2C2_ClearIF(_sccb))
{
return 0x46;
}
//Stop condition
I2C2_Stop(_sccb);
if(_sccb)__delay_ms(15);
return true;
}
uint8_t I2C2_b1Read(uint8_t _device_add, uint8_t _data1, bool _sccb)
{
uint8_t ret;
//Start Condition
I2C2_Start(_sccb);
//send device address
ret=I2C2_Tx_Buffer_Write(_device_add);
I2C2_Send_Ack(I2C2_Ack);
if(!I2C2_ClearIF(_sccb))
{
return 0xA1;
}
//send data
I2C2_Tx_Buffer_Write(_data1);
I2C2_Send_Ack(I2C2_Ack);
if(!I2C2_ClearIF(_sccb))
{
return 0xA3;
}
//Stop Condition
ret=I2C2_Stop(_sccb);
//restart
I2C2_Start(_sccb);
//send device address
I2C2_Tx_Buffer_Write(_device_add|0x01);
I2C2_Send_Ack(I2C2_Ack);
if(!I2C2_ClearIF(_sccb))
{
return 0xA6;
}
//recieve data
ret=I2C2_Rx_Buffer_Read();
if(!I2C2_ClearIF(_sccb))
{
return 0xA7;
}
//send Nack
I2C2_Send_Ack(I2C2_NoAck);
if(!I2C2_ClearIF(true))
{
return 0xA2;
}
//Stop Condition
I2C2_Stop(_sccb);
return ret;
}
bool I2C2_bnRead(uint8_t _device_add, uint8_t _data1,uint8_t _len, bool _sccb)
{
uint8_t index=0;
//Start Condition
I2C2_Start(_sccb);
//send device address
I2C2_Tx_Buffer_Write(_device_add);
if(!I2C2_Wait_Ack(_sccb))
{
return 0xA0;
}
if(!I2C2_ClearIF(_sccb))
{
return 0xA1;
}
//send data
I2C2_Tx_Buffer_Write(_data1);
if(!I2C2_Wait_Ack(_sccb))
{
return 0xA2;
}
if(!I2C2_ClearIF(_sccb))
{
return 0xA3;
}
//restart
I2C2_ReStart();
if(!I2C2_ClearIF(_sccb))
{
return 0xA4;
}
//send device address
I2C2_Tx_Buffer_Write(_device_add|0x01);
if(!I2C2_Wait_Ack(_sccb))
{
return 0xA5;
}
if(!I2C2_ClearIF(_sccb))
{
return 0xA6;
}
//recieve data
do{
I2C2_DataBuffer[index++]=I2C2_Rx_Buffer_Read();
if(!I2C2_ClearIF(_sccb))
{
return 0xA7;
}
if(_len!=1)
{
I2C2_Send_Ack(I2C2_Ack);
}
_len--;
}while(_len!=0);
//send Nack
I2C2_Send_Ack(I2C2_NoAck);
I2C2_Stop(_sccb);
return true;
}
SPI2.h
#ifndef DSSSP2_H
#define DSSSP2_H
#ifdef __cplusplus
extern "C" {
#endif
#include <xc.h>
#include <cp0defs.h>
#include <sys/attribs.h>
#include <stdio.h>
#include <stdbool.h>
#include "peripheral.h"
#define Low 0
#define High 1
#define SPI2_CS LATBbits.LATB5
typedef struct{
uint8_t val;
bool error;
}_SPI_RD;
extern _SPI_RD SPI_RD;
extern void Spi2Init(void);
extern void SPI2_Start(void);
extern uint8_t SPI2_Write(unsigned char _data);
extern bool SPI2_Write3byte(unsigned char _data0,unsigned char _data1,unsigned char _data2);
extern _SPI_RD SPI2_Read(void);
extern void SPI2_Stop(void);
/*-----------------------------------*/
//MCP23S08 I/O expander
/*-----------------------------------*/
#define MCP23S08_Device1Add 0x40
#define MCP23S08_Device2Add 0x42
#define MCP23S_R 1
#define MCP23S_W 0
typedef enum
{
IODIR=0x00,
IPOL,
GPINTEN,
DEFVAL,
INTCN,
IOCON,
GPPU,
mINTF,
INTCAP,
GPIO,
OLAT=0x0A
}_reg;
extern unsigned char reg_value[10];
extern bool MCP23S_Init(uint8_t _device_add);
extern bool MCP23S_SendOPcode(uint8_t _device_add, uint8_t _reg_add, uint8_t RW);
extern bool MCP23S_WriteReg(uint8_t _device_add,uint8_t _reg_add, uint8_t _data);
extern bool MCP23S_b2Write(uint8_t _device_add, uint8_t _data1, uint8_t _data2);
extern uint8_t MCP23S_b1ReadReg(uint8_t _device_add, uint8_t _reg_add);
#ifdef __cplusplus
}
#endif
#endif /* SSP1_H */
SPI2.c
#include "PIC32_SPI2.h"
_SPI_RD SPI_RD;
//SPI2 for TFT液晶ST7735
void Spi2Init(void)
{
//1.using Interrupt
IFS1bits.SPI2EIF=0;
IEC1bits.SPI2EIE=0;
//2.Master Mode
SPI2CONbits.DISSDI=0;
SPI2CONbits.DISSDO=0;
SPI2CONbits.MODE16=0;
SPI2CONbits.MODE32=0;
SPI2CONbits.SMP=1;
SPI2CONbits.CKE=1;
SPI2CONbits.CKP=0;
SPI2CONbits.MSTEN=1;//master mode
SPI2CON2bits.AUDEN=0;
//3.SPI baudrate
//SPI2BRG=255;
//SPI2BRG=1;//24Mhz Fpb=96Mhz
SPI2BRG=0;//40Mhz Fpb=96Mhz
SPI2STATbits.SPIROV=0;
SPI2CON2=0x0000;
SPI2CONbits.ENHBUF=0;//FIFObuffer no use:0
//5.Port pin
//SDO2 RD11
RPD11Rbits.RPD11R = 0b0110;
//SDI2 RD3
SDI2R = 0b0000;//RPD3
TRISD|=0x0008; //RD3
//4.SPI enable
SPI2CONbits.ON=1;//1:Enable SPI
}
void SPI2_Start(void)
{
SPI2_CS=Low;
}
uint8_t SPI2_Write(unsigned char _data)
{
int i;
unsigned char buf;
i=0;
buf=SPI2BUF;
for(i=0x7FFF; i; i--)
{
if(!SPI2STATbits.SPITBF)
{
break;
}
}
SPI2BUF=_data;
for(i=0x7FFF; i; i--)
{
if(!SPI2STATbits.SPITBF)
{
break;
}
}
for(i=0x7FFF; i; i--)
{
if(!SPI2STATbits.SPIBUSY)
{
return true;
}
}
return false;
}
bool SPI2_Write3byte(unsigned char _data0,unsigned char _data1,unsigned char _data2)
{
int i,j;
unsigned char buf;
for(j=0; j<3; j++)
{
buf=SPI2BUF;
for(i=0x7FFF; i; i--)
{
if(!SPI2STATbits.SPITBF)
{
break;
}
}
if(j==0)
SPI2BUF=_data0;
if(j==1)
SPI2BUF=_data1;
if(j==2)
SPI2BUF=_data2;
for(i=0x7FFF; i; i--)
{
if(!SPI2STATbits.SPITBF)
{
break;
}
}
for(i=0x7FFF; i; i--)
{
if(IFS1bits.SPI1EIF)
{
IFS1bits.SPI1EIF=0;
break;
}
}
}
return true;
}
_SPI_RD SPI2_Read(void)
{
signed int i;
SPI_RD.error=true;
SPI_RD.val=0xFC;
for(i=0x7FFF; i; i--)
{
if(SPI2STATbits.SPIRBF)
{
SPI_RD.val=SPI2BUF;
SPI_RD.error=false;
break;
}
}
return SPI_RD;
}
void SPI2_Stop(void)
{
unsigned char buf;
buf=SPI2BUF;
SPI2_CS=High;
__delay_us(10);
}
/*-----------------------------------*/
//MCP23S08 I/O expander
/*-----------------------------------*/
_reg MCP23S08reg;
unsigned char reg_value[10]={0x00,0x00,0x00,0x00,0x18,
0xFF,0x00,0x00,0x00,0x00};
_SPI_RD SPI_RD;
bool MCP23S_Init(uint8_t _device_add)
{
bool ret;
ret=MCP23S_WriteReg(_device_add,IODIR,0x00);
if(!ret) return 0xB1;
__delay_ms(1);
ret=MCP23S_WriteReg(_device_add,IOCON,0x38);
if(!ret) return 0xB2;
return true;
}
bool MCP23S_SendOPcode(uint8_t _device_add, uint8_t _reg_add, uint8_t RW)
{
bool ret=false;
ret=SPI2_Write(_device_add|RW);
if(!ret)
{
return false;
}
ret=SPI2_Write(_reg_add);
if(!ret)
{
return false;
}
return ret;
}
bool MCP23S_WriteReg(uint8_t _device_add,uint8_t _reg_add, uint8_t _data)
{
bool ret=false;
SPI2_Start();
ret=MCP23S_SendOPcode(_device_add, _reg_add, MCP23S_W);
if(ret!=true)
return 0xF1;
ret=SPI2_Write(_data);
if(ret!=true)
return 0xF2;
SPI2_Stop();
return ret;
}
bool MCP23S_b2Write(uint8_t _device_add, uint8_t _data1, uint8_t _data2)
{
bool ret=false;
SPI2_Start();
ret=SPI2_Write(_device_add|MCP23S_W);
if(ret!=true)
return 0xF1;
ret=SPI2_Write(_data1);
if(ret!=true)
return 0xF2;
ret=SPI2_Write(_data2);
if(ret!=true)
return 0xF3;
SPI2_Stop();
return ret;
}
uint8_t MCP23S_b1ReadReg(uint8_t _device_add, uint8_t _reg_add)
{
bool ret;
_SPI_RD rdRet;
SPI2_Start();
ret=SPI2_Write(_device_add|MCP23S_R);
if(!ret)
{
return false;
}
ret=SPI2_Write(_reg_add);
if(!ret)
{
return false;
}
SPI2_Write(0xFF);
rdRet=SPI2_Read();
SPI2_Stop();
if(rdRet.error)
{
return rdRet.val=0xFE;
}
return rdRet.val;
}
ST7735S.h
/*
* File: ST7735S.h
* Author: h
*
* Created on 2021/06/20, 15:37
* 21.08.11 1216フォント追加
* 21.08.27 dsPIC用
*/
#ifndef ST7735S_H
#define ST7735S_H
#ifdef __cplusplus
extern "C" {
#endif
#include <xc.h>
#include <cp0defs.h>
#include <sys/attribs.h>
#include <stdio.h>
#include <stdbool.h>
#include "peripheral.h"
#define line0 115
#define line1 103
#define line2 91
#define line3 79
#define line4 67
#define line5 55
#define line6 43
#define line7 31
#define line8 19
#define line9 12
#define line10 0
#define ST7735_CM 0
#define ST7735_DT 1
//#define backColor_White
#define backColor_Black
#ifdef backColor_Black
#define backColor_R 0xFC
#define backColor_G 0xFC
#define backColor_B 0xFC
#endif
#ifdef backColor_White
#define backColor_R 0x10
#define backColor_G 0x10
#define backColor_B 0xFC
#endif
#define char8Y_R 0x40
#define char8Y_G 0x30
#define char8Y_B 0x00
#define char10Y_R 0xFC
#define char10Y_G 0x30
#define char10Y_B 0x00
#define char12Y_R 0xFC
#define char12Y_G 0x00
#define char12Y_B 0x00
#define char16Y_R 0xFC
#define char16Y_G 0x00
#define char16Y_B 0x00
#define char88Offset 0x60
#define char88OffsetNumber 2
#define char1010OffsetNumber 2
#define char1010OffsetAZ 0x34
#define char1216OffsetNumber 3
#define char1216OffsetAZ 0x33
extern const uint8_t char8Set[38][8];
extern volatile uint8_t *psv_pt;
extern const uint8_t char10Set[39][20];
extern const uint8_t char12Set[10][24];
extern const uint8_t char1216Set[41][24];
extern const uint8_t char1616Set[6][32];
typedef struct{
uint8_t cnt;
}_ST7735;
extern volatile _ST7735 ST7735;
#define ST7735_A0 LATBbits.LATB3
extern void ST7735S_Init(void);
extern void ST7735S_Write(uint8_t _CD, uint8_t _data);
extern void ST7735S_AddSet(uint8_t _xs,uint8_t _xe, uint8_t _ys,uint8_t _ye);
extern void ST7735S_WriteChar8X(const uint8_t* _ch);
extern void ST7735S_WriteChar8Y(const uint8_t* _ch,uint8_t _R,uint8_t _G, uint8_t _B);
extern void ST7735S_WriteChar10Y(const uint8_t* _ch, uint8_t _R, uint8_t _G, uint8_t _B);
extern void ST7735S_WriteChar12Y(const uint8_t* _ch);
extern void ST7735S_WriteChar1216Y(const uint8_t* _ch, uint8_t _R, uint8_t _G, uint8_t _B);
extern void ST7735S_WriteChar1616Y(const uint8_t* _ch);
extern void ST7735S_Printf88(uint8_t _xs, uint8_t _ys, uint8_t *txt, uint8_t _length,uint8_t _R,uint8_t _G, uint8_t _B);
extern void ST7735S_PrintInt1010(uint8_t xs,uint8_t ys, uint16_t _val,uint8_t _R,uint8_t _G, uint8_t _B);
extern void ST7735S_Printf1010(uint8_t xs, uint8_t ys, uint8_t *txt,uint8_t _length,uint8_t _R,uint8_t _G, uint8_t _B);
extern void ST7735S_Printf1216(uint8_t _xs, uint8_t _ys, uint8_t *txt, uint8_t _length,uint8_t _R,uint8_t _G, uint8_t _B);
extern void ST7735S_PrintChar1010(uint8_t _xs, uint8_t _ys, uint8_t _ch,uint8_t _R,uint8_t _G, uint8_t _B);
extern void ST7735S_Rectangle(uint8_t _xs, uint8_t _ys, uint8_t _xsize, uint8_t _ysize,uint8_t _R,uint8_t _G, uint8_t _B);
extern void ST7735S_PaintALL(uint8_t R,uint8_t G,uint8_t B);
extern void ST7735S_Demo(void);
#ifdef __cplusplus
}
#endif
#endif /* ST7735S_H */
ST7735S.c
#include "ds_ST7735S.h"
#include "PIC32_SPI2.h"
#include "PIC32_Graphics.h"
const uint8_t char8Set[38][8] =
{
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},//SP88
{0x00,0x00,0x08,0x08,0x08,0x08,0x08,0x00},//-(0x2D)
{0x00,0x3e,0x41,0x41,0x41,0x41,0x3e,0x00},//0(0x30)88
{0x00,0x00,0x00,0x20,0x7f,0x00,0x00,0x00},//1(0x31)88
{0x00,0x33,0x45,0x49,0x49,0x49,0x31,0x00},//2(0x32)88
{0x00,0x22,0x41,0x49,0x49,0x49,0x36,0x00},//3(0x33)88
{0x00,0x0e,0x12,0x22,0x42,0x7f,0x02,0x00},//4(0x34)88
{0x00,0x79,0x49,0x49,0x49,0x49,0x46,0x00},//5(0x35)88
{0x00,0x3e,0x49,0x49,0x49,0x49,0x2e,0x00},//6(0x36)88
{0x00,0x00,0x40,0x41,0x42,0x44,0x78,0x00},//7(0x37)88
{0x00,0x36,0x49,0x49,0x49,0x49,0x36,0x00},//8(0x38)88
{0x00,0x32,0x49,0x49,0x49,0x49,0x3e,0x00},//9(0x39)88
{0x00,0x24,0x4a,0x52,0x52,0x3e,0x02,0x00},//a(0x61)882
{0x00,0x7c,0x0a,0x12,0x12,0x12,0x0c,0x00},//b(0x62)882
{0x00,0x1c,0x22,0x22,0x22,0x22,0x14,0x00},//c(0x63)882
{0x00,0x0c,0x12,0x12,0x12,0x0a,0x7c,0x00},//d(0x64)882
{0x00,0x3c,0x52,0x52,0x52,0x52,0x24,0x00},//e(0x65)882
{0x00,0x00,0x10,0x7e,0x90,0x50,0x00,0x00},//f(0x66)882
{0x00,0x32,0x4a,0x4a,0x4a,0x4a,0x3c,0x00},//g(0x67)882
{0x00,0xfe,0x10,0x20,0x20,0x20,0x1e,0x00},//h(0x68)882
{0x00,0x00,0x00,0xbe,0x00,0x00,0x00,0x00},//i(0x69)882
{0x00,0x0c,0x02,0x02,0x02,0x02,0xbc,0x00},//j(0x6a)882
{0x00,0x00,0xfe,0x08,0x18,0x24,0x42,0x00},//k(0x6b)882
{0x00,0x00,0x80,0xfe,0x00,0x00,0x00,0x00},//l(0x6c)882
{0x00,0x30,0x40,0x7e,0x20,0x7e,0x20,0x7e},//m(0x6d)882
{0x00,0x7e,0x10,0x20,0x40,0x40,0x3e,0x00},//n(0x6e)882
{0x00,0x3c,0x42,0x42,0x42,0x42,0x3c,0x00},//o(0x6f)882
{0x00,0x3e,0x48,0x48,0x48,0x48,0x30,0x00},//p(0x70)882
{0x00,0x30,0x48,0x48,0x48,0x30,0x7e,0x00},//q(0x71)882
{0x00,0x7e,0x20,0x40,0x40,0x40,0x30,0x00},//r(0x72)882
{0x00,0x12,0x2a,0x2a,0x2a,0x2a,0x2c,0x00},//s(0x73)882
{0x00,0x40,0x40,0xfc,0x42,0x42,0x44,0x00},//t(0x74)882
{0x00,0x7c,0x02,0x02,0x7c,0x02,0x02,0x00},//u(0x75)882
{0x00,0x78,0x04,0x02,0x02,0x04,0x78,0x00},//v(0x76)882
{0x00,0x7c,0x02,0x02,0x7c,0x02,0x02,0x7c},//w(0x77)882
{0x00,0x42,0x24,0x18,0x18,0x24,0x42,0x00},//x(0x78)882
{0x00,0x00,0x40,0x20,0x1e,0x20,0x40,0x00},//y(0x79)882
{0x00,0x42,0x46,0x4a,0x52,0x62,0x42,0x00}//z(0x7a)882
};
const uint8_t char10Set[39][20]=
{
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},//SP1010
{0x00,0x00,0x00,0x00,0x00,0x00,0x06,0x00,0x0f,0x00,0x0f,0x00,0x06,0x00,0x00,0x00,0x00,0x00,0x00,0x00},//.(0x2e)1010
{0x00,0x00,0xfc,0x00,0xfe,0x01,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0xfe,0x01,0xfc,0x00},//0(0x30)1010
{0x00,0x00,0x00,0x00,0x00,0x00,0xc0,0x00,0xc0,0x01,0xff,0x03,0xff,0x03,0x00,0x00,0x00,0x00,0x00,0x00},//1(0x31)1010
{0x00,0x00,0xc3,0x00,0xc7,0x01,0x0f,0x03,0x1b,0x03,0x1b,0x03,0x33,0x03,0x63,0x03,0xe3,0x01,0xc3,0x00},//2(0x32)1010
{0x00,0x00,0x86,0x01,0x87,0x03,0x33,0x03,0x33,0x03,0x33,0x03,0x33,0x03,0xff,0x03,0xfe,0x01,0xcc,0x00},//3(0x33)1010
{0x00,0x00,0x38,0x00,0x7c,0x00,0xcc,0x00,0x8c,0x01,0x0c,0x03,0xff,0x03,0xff,0x03,0x0c,0x00,0x0c,0x00},//4(0x34)1010
{0x00,0x00,0xe6,0x03,0xe7,0x03,0x63,0x03,0x63,0x03,0x63,0x03,0x63,0x03,0x7e,0x03,0x3c,0x03,0x00,0x00},//5(0x35)1010
{0x00,0x00,0xfc,0x00,0xfe,0x01,0x33,0x03,0x33,0x03,0x33,0x03,0x33,0x03,0x33,0x03,0x9e,0x01,0x9c,0x00},//6(0x36)1010
{0x00,0x00,0x00,0x03,0x00,0x03,0x00,0x03,0x0f,0x03,0x1f,0x03,0x30,0x03,0xe0,0x03,0xc0,0x03,0x80,0x03},//7(0x37)1010
{0x00,0x00,0xce,0x01,0xff,0x03,0x33,0x03,0x33,0x03,0x33,0x03,0x33,0x03,0x33,0x03,0xff,0x03,0xce,0x01},//8(0x38)1010
{0x00,0x00,0xc0,0x00,0xe3,0x01,0x33,0x03,0x33,0x03,0x33,0x03,0x33,0x03,0x33,0x03,0xfe,0x01,0xfc,0x00},//9(0x39)1010
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xce,0x01,0xce,0x01,0xce,0x01,0x00,0x00,0x00,0x00,0x00,0x00},//:(0x3A)1010
{0x00,0x00,0xff,0x00,0xff,0x01,0x18,0x03,0x18,0x03,0x18,0x03,0x18,0x03,0x18,0x03,0xff,0x01,0xff,0x00},//A(0x41)1010 14番目
{0x00,0x00,0xfe,0x01,0xff,0x03,0x33,0x03,0x33,0x03,0x33,0x03,0x33,0x03,0x33,0x03,0xfe,0x01,0xdc,0x00},//B(0x42)1010
{0x00,0x00,0xfc,0x00,0xfe,0x01,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x8e,0x01,0x8c,0x00},//C(0x43)1010
{0x00,0x00,0xfe,0x01,0xff,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x87,0x03,0xfe,0x01,0xfc,0x00},//D(0x44)1010
{0x00,0x00,0xfe,0x01,0xff,0x03,0x33,0x03,0x33,0x03,0x33,0x03,0x33,0x03,0x33,0x03,0x33,0x03,0x33,0x03},//E(0x45)1010
{0x00,0x00,0xff,0x01,0xff,0x03,0x30,0x03,0x30,0x03,0x30,0x03,0x30,0x03,0x30,0x03,0x30,0x03,0x30,0x03},//F(0x46)1010
{0x00,0x00,0xfc,0x00,0xfe,0x01,0x03,0x03,0x03,0x03,0x03,0x03,0x33,0x03,0x33,0x03,0xbe,0x01,0x9c,0x00},//G(0x47)1010
{0x00,0x00,0xff,0x03,0xff,0x03,0x30,0x00,0x30,0x00,0x30,0x00,0x30,0x00,0x30,0x00,0xff,0x03,0xff,0x03},//H(0x48)1010
{0x00,0x00,0x00,0x00,0x00,0x00,0x03,0x03,0xff,0x03,0xff,0x03,0x03,0x03,0x00,0x00,0x00,0x00,0x00,0x00},//I(0x49)1010
{0x00,0x00,0x1c,0x00,0x1e,0x00,0x03,0x00,0x03,0x00,0x03,0x00,0xfe,0x03,0xfc,0x03,0x00,0x00,0x00,0x00},//J(0x4A)1010
{0x00,0x00,0xff,0x03,0xff,0x03,0x30,0x00,0x78,0x00,0xcc,0x00,0x86,0x01,0x03,0x03,0x03,0x00,0x00,0x00},//K(0x4B)1010
{0x00,0x00,0xff,0x03,0xff,0x03,0x03,0x00,0x03,0x00,0x03,0x00,0x03,0x00,0x03,0x00,0x03,0x00,0x00,0x00},//L(0x4C)1010
{0x00,0x00,0xff,0x03,0xff,0x03,0x80,0x01,0xe0,0x00,0x70,0x00,0xe0,0x00,0x80,0x01,0xff,0x03,0xff,0x03},//M(0x4D)1010
{0x00,0x00,0xff,0x03,0xff,0x03,0x80,0x01,0xe0,0x00,0x70,0x00,0x18,0x00,0x0e,0x00,0xff,0x03,0xff,0x03},//N(0x4E)1010
{0x00,0x00,0xfc,0x00,0xfe,0x01,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0xfe,0x01,0xfc,0x00},//O(0x4F)1010
{0x00,0x00,0xff,0x03,0xff,0x03,0x18,0x03,0x18,0x03,0x18,0x03,0x18,0x03,0x18,0x03,0xf0,0x01,0xe0,0x00},//P(0x50)1010
{0x00,0x00,0xfc,0x00,0xfe,0x01,0x03,0x03,0x13,0x03,0x1b,0x03,0x0f,0x03,0x86,0x01,0xff,0x00,0x7b,0x00},//Q(0x51)1010
{0x00,0x00,0xff,0x03,0xff,0x03,0x18,0x03,0x18,0x03,0x18,0x03,0x1c,0x03,0x1e,0x03,0xf7,0x01,0xe3,0x00},//R(0x52)1010
{0x00,0x00,0xe6,0x00,0xf7,0x01,0x33,0x03,0x33,0x03,0x33,0x03,0x33,0x03,0x33,0x03,0x9e,0x01,0x8c,0x00},//S(0x53)1010
{0x00,0x00,0x00,0x03,0x00,0x03,0x00,0x03,0xff,0x03,0xff,0x03,0x00,0x03,0x00,0x03,0x00,0x03,0x00,0x00},//T(0x54)1010
{0x00,0x00,0xfc,0x03,0xfe,0x03,0x07,0x00,0x03,0x00,0x03,0x00,0x03,0x00,0x07,0x00,0xfe,0x03,0xfc,0x03},//U(0x55)1010
{0x00,0x00,0xe0,0x03,0xf8,0x03,0x1e,0x00,0x07,0x00,0x03,0x00,0x07,0x00,0x1e,0x00,0xf8,0x03,0xe0,0x03},//V(0x56)1010
{0x00,0x00,0xfc,0x03,0xfe,0x03,0x03,0x00,0x03,0x00,0xfe,0x03,0x03,0x00,0x03,0x00,0xfe,0x03,0xfc,0x03},//W(0x57)1010
{0x00,0x00,0x03,0x03,0x87,0x03,0xce,0x01,0xfc,0x00,0x78,0x00,0xfc,0x00,0xce,0x01,0x87,0x03,0x03,0x03},//X(0x58)1010
{0x00,0x00,0xc0,0x03,0xe0,0x03,0x70,0x00,0x3f,0x00,0x3f,0x00,0x70,0x00,0xe0,0x03,0xc0,0x03,0x00,0x00},//Y(0x59)1010
{0x00,0x00,0x07,0x03,0x4f,0x03,0x7f,0x03,0x3b,0x03,0x33,0x03,0x73,0x03,0xfb,0x03,0xcb,0x03,0x83,0x03},//Z(0x5A)1010
};
const uint8_t char1216Set[41][24]=
{
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},//SP1216
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0c,0x00,0x1e,0x00,0x1e,0x00,0x0c,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},//。(0x2e)1216
{0x01,0x00,0x07,0x00,0x0e,0x00,0x18,0x00,0x70,0x00,0xe0,0x00,0x80,0x01,0x00,0x07,0x00,0x0e,0x00,0x38,0x00,0x70,0x00,0xc0},///(0x2F)1612
{0x00,0x00,0xf8,0x1f,0xfc,0x3f,0x06,0x60,0x06,0x60,0x06,0x60,0x06,0x60,0x06,0x60,0x06,0x60,0xfc,0x3f,0xf8,0x1f,0x00,0x00},//0(0x30)1612
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x18,0x00,0x38,0xfe,0x7f,0xfe,0x7f,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},//1(0x31)1612
{0x00,0x00,0x06,0x1e,0x0e,0x3e,0x1e,0x60,0x3e,0x60,0x76,0x60,0xe6,0x60,0xc6,0x61,0x86,0x63,0x06,0x7f,0x06,0x3e,0x00,0x00},//2(0x32)1612
{0x00,0x00,0x18,0x18,0x1c,0x38,0x06,0x60,0x86,0x61,0x86,0x61,0x86,0x61,0x86,0x61,0x86,0x61,0xfc,0x3f,0x78,0x1e,0x00,0x00},//3(0x33)1612
{0x00,0x00,0x78,0x00,0xf8,0x01,0x98,0x03,0x18,0x0f,0x18,0x1c,0x18,0x38,0x18,0x60,0xfe,0x7f,0xfe,0x7f,0x18,0x00,0x00,0x00},//4(0x34)1612
{0x00,0x00,0x0c,0x7f,0x0e,0x7f,0x06,0x63,0x06,0x63,0x06,0x63,0x06,0x63,0x06,0x63,0x06,0x63,0xfe,0x63,0xfc,0x63,0x00,0x00},//4(0x34)1612
{0x00,0x00,0xf8,0x1f,0xfc,0x3f,0x86,0x61,0x86,0x61,0x86,0x61,0x86,0x61,0x86,0x61,0x86,0x61,0xfc,0x70,0x78,0x30,0x00,0x00},//6(0x36)1612
{0x00,0x00,0x00,0x60,0x00,0x60,0x00,0x60,0x00,0x60,0x7e,0x60,0xfe,0x60,0x80,0x61,0x00,0x63,0x00,0x7e,0x00,0x7c,0x00,0x00},//7(0x37)1612
{0x00,0x00,0x78,0x1e,0xfc,0x3f,0x86,0x61,0x86,0x61,0x86,0x61,0x86,0x61,0x86,0x61,0x86,0x61,0xfc,0x3f,0x78,0x1e,0x00,0x00},//8(0x38)1612
{0x00,0x00,0x00,0x1f,0x86,0x3f,0xc6,0x60,0xc6,0x60,0xc6,0x60,0xc6,0x60,0xc6,0x60,0xc6,0x60,0xfc,0x3f,0xf8,0x1f,0x00,0x00},//9(0x39)1216
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x0c,0x78,0x1e,0x78,0x1e,0x30,0x0c,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},//:(0x3A)1612
{0x00,0x00,0xfe,0x1f,0xfe,0x3f,0xc0,0x60,0xc0,0x60,0xc0,0x60,0xc0,0x60,0xc0,0x60,0xc0,0x60,0xfe,0x3f,0xfe,0x1f,0x00,0x00},//A(0x41)1612
{0x00,0x00,0xfc,0x3f,0xfe,0x7f,0x86,0x61,0x86,0x61,0x86,0x61,0x86,0x61,0x86,0x61,0x86,0x61,0xfc,0x3f,0x78,0x1e,0x00,0x00},//B(0x42)1612
{0x00,0x00,0xf8,0x1f,0xfc,0x3f,0x06,0x60,0x06,0x60,0x06,0x60,0x06,0x60,0x06,0x60,0x06,0x60,0x3c,0x3c,0x38,0x1c,0x00,0x00},//C(0x43)1612
{0x00,0x00,0xfe,0x7f,0xfe,0x7f,0x06,0x60,0x06,0x60,0x06,0x60,0x06,0x60,0x0e,0x70,0x1c,0x38,0xf8,0x1f,0xf0,0x0f,0x00,0x00},//D(0x44)1612
{0x00,0x00,0xfc,0x3f,0xfe,0x7f,0x86,0x61,0x86,0x61,0x86,0x61,0x86,0x61,0x86,0x61,0x86,0x61,0x86,0x61,0x86,0x61,0x00,0x00},//E(0x45)1612
{0x00,0x00,0xfe,0x3f,0xfe,0x7f,0x80,0x61,0x80,0x61,0x80,0x61,0x80,0x61,0x80,0x61,0x80,0x61,0x80,0x61,0x80,0x61,0x00,0x00},//F(0x46)1612
{0x00,0x00,0xf8,0x1f,0xfc,0x3f,0x06,0x60,0x06,0x60,0x06,0x60,0x86,0x61,0x86,0x61,0x8e,0x61,0xfc,0x39,0xf8,0x19,0x00,0x00},//G(0x47)1612
{0x00,0x00,0xfe,0x7f,0xfe,0x7f,0x80,0x01,0x80,0x01,0x80,0x01,0x80,0x01,0x80,0x01,0x80,0x01,0xfe,0x7f,0xfe,0x7f,0x00,0x00},//H(0x48)1612
{0x00,0x00,0x00,0x00,0x06,0x60,0x06,0x60,0x06,0x60,0xfe,0x7f,0xfe,0x7f,0x06,0x60,0x06,0x60,0x06,0x60,0x00,0x00,0x00,0x00},//I(0x49)1612
{0x00,0x00,0xf8,0x00,0xfc,0x00,0x06,0x00,0x06,0x00,0x06,0x00,0x06,0x00,0x06,0x00,0x06,0x00,0xfc,0x7f,0xf8,0x7f,0x00,0x00},//J(0x4A)1612
{0x00,0x00,0xfe,0x7f,0xfe,0x7f,0x80,0x01,0xc0,0x03,0x60,0x06,0x30,0x0c,0x18,0x18,0x0c,0x30,0x06,0x60,0x02,0x40,0x00,0x00},//K(0x4B)1612
{0x00,0x00,0xfe,0x7f,0xfe,0x7f,0x06,0x00,0x06,0x00,0x06,0x00,0x06,0x00,0x06,0x00,0x06,0x00,0x06,0x00,0x06,0x00,0x00,0x00},//L(0x4C)
{0x00,0x00,0xfe,0x7f,0xfe,0x7f,0x00,0x38,0x00,0x1c,0xfe,0x0f,0xfe,0x0f,0x00,0x1c,0x00,0x38,0xfe,0x7f,0xfe,0x7f,0x00,0x00},//M(0x4D)
{0x00,0x00,0xfe,0x7f,0xfe,0x7f,0x00,0x38,0x00,0x0e,0x80,0x07,0xc0,0x01,0x78,0x00,0x1c,0x00,0xfe,0x7f,0xfe,0x7f,0x00,0x00},//N(0x4E)
{0x00,0x00,0xf8,0x1f,0xfc,0x3f,0x0e,0x70,0x06,0x60,0x06,0x60,0x06,0x60,0x06,0x60,0x0e,0x70,0xfc,0x3f,0xf8,0x1f,0x00,0x00},//O(0x4F)
{0x00,0x00,0xfe,0x3f,0xfe,0x7f,0x80,0x61,0x80,0x61,0x80,0x61,0x80,0x61,0x80,0x61,0x80,0x61,0x00,0x3f,0x00,0x1e,0x00,0x00},//P(0x50)
{0x00,0x00,0xf0,0x1f,0xf8,0x3f,0x0c,0x60,0x0c,0x60,0x6c,0x60,0x7c,0x60,0x1c,0x60,0x0e,0x60,0xfe,0x3f,0xf6,0x1f,0x06,0x00},//Q(0x51)
{0x00,0x00,0xfe,0x7f,0xfe,0x7f,0x80,0x61,0xc0,0x61,0xe0,0x61,0xb0,0x61,0x98,0x61,0x8c,0x61,0x06,0x3f,0x02,0x1e,0x00,0x00},//R(0x52)
{0x00,0x00,0x1c,0x1f,0x9e,0x3f,0x86,0x61,0x86,0x61,0x86,0x61,0x86,0x61,0x86,0x61,0x86,0x61,0xfc,0x38,0x78,0x18,0x00,0x00},//S(0x53)
{0x00,0x00,0x00,0x60,0x00,0x60,0x00,0x60,0x00,0x60,0xfe,0x7f,0xfe,0x7f,0x00,0x60,0x00,0x60,0x00,0x60,0x00,0x60,0x00,0x00},//T(0x54)
{0x00,0x00,0xf8,0x7f,0xfc,0x7f,0x0e,0x00,0x06,0x00,0x06,0x00,0x06,0x00,0x06,0x00,0x0e,0x00,0xfc,0x7f,0xf8,0x7f,0x00,0x00},//U(0x55)
{0x00,0x00,0xe0,0x7f,0xf0,0x7f,0x38,0x00,0x1c,0x00,0x0e,0x00,0x0e,0x00,0x1c,0x00,0x38,0x00,0xf0,0x7f,0xe0,0x7f,0x00,0x00},//V(0x56)
{0x00,0x00,0x00,0x7f,0xfc,0x7f,0xfe,0x00,0x0c,0x00,0xf8,0x7f,0xf8,0x7f,0x0c,0x00,0xfe,0x00,0xfc,0x7f,0x00,0x7f,0x00,0x00},//W(0x57)
{0x02,0x40,0x06,0x60,0x0c,0x30,0x38,0x1c,0x70,0x0e,0xc0,0x03,0xc0,0x03,0x70,0x0e,0x18,0x1c,0x0c,0x30,0x06,0x60,0x02,0x40},//X(0x57)
{0x00,0x40,0x00,0x60,0x00,0x30,0x00,0x1c,0x00,0x0e,0xfe,0x07,0xfe,0x07,0x00,0x0e,0x00,0x1c,0x00,0x30,0x00,0x60,0x00,0x40},//Y(0x58)
{0x00,0x00,0x0e,0x60,0x1e,0x60,0x36,0x64,0x66,0x66,0xc6,0x63,0xc6,0x63,0xc6,0x66,0x66,0x6c,0x26,0x78,0x06,0x70,0x00,0x00},//Z(0x59)
{0x01,0x00,0x07,0x00,0x0e,0x00,0x18,0x00,0x70,0x00,0xe0,0x00,0x80,0x01,0x00,0x07,0x00,0x0e,0x00,0x38,0x00,0x70,0x00,0xc0}///(0x2F)
};
const uint8_t char1616Set[6][32]=
{
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},//SP
{0x00,0x00,0xfe,0x7f,0x00,0x49,0x00,0x49,0x00,0x49,0x52,0x49,0x7e,0x7f,0x50,0x00,0x50,0x00,0x7e,0x7f,0x50,0x49,0x00,0x49,0x00,0x49,0x00,0x49,0xfe,0x7f,0x00,0x00},//開
{0x00,0x00,0x02,0x08,0xe4,0x3f,0x18,0x08,0x18,0x08,0xe4,0x3f,0x02,0x08,0x00,0x00,0x7e,0x03,0x42,0x0d,0x42,0x31,0x42,0x01,0x42,0x05,0x42,0x03,0x7e,0x01,0x80,0x00},//始
{0x00,0x00,0xf8,0x1f,0xfc,0x3f,0x06,0x60,0x06,0x60,0x06,0x60,0x06,0x60,0x06,0x60,0x1c,0x3c,0x18,0x1c,0x00,0x00,0x00,0x30,0x00,0x48,0x00,0x48,0x00,0x30,0x00,0x00},//摂氏
{0x00,0x00,0x00,0x00,0x06,0x0c,0x0c,0x1e,0x18,0x33,0x30,0x33,0x60,0x1e,0xc0,0x0c,0x80,0x01,0x18,0x03,0x3c,0x06,0x66,0x0c,0x66,0x18,0x3c,0x30,0x18,0x60,0x00,0x00},//%
{0x00,0x00,0xf0,0x0f,0xf0,0x0f,0xf0,0x0f,0xf0,0x0f,0xf0,0x0f,0xf0,0x0f,0xf0,0x0f,0xfe,0x7f,0xfc,0x3f,0xf8,0x1f,0xf0,0x0f,0xe0,0x07,0xc0,0x03,0x80,0x01,0x00,0x00}//矢印右
};
volatile _ST7735 ST7735;
volatile uint8_t *psv_pt;
void ST7735S_Init(void)
{
uint8_t x,y;
uint16_t i,j;
ST7735S_Write(ST7735_CM,0x01);
__delay_ms(120);
ST7735S_Write(ST7735_CM,0x11);
__delay_ms(120);
ST7735S_Write(ST7735_CM,0x28);
ST7735S_Write(ST7735_CM,0x36);
ST7735S_Write(ST7735_DT,0x60);//Camera QQVGA
//ST7735S_Write(ST7735_DT,0b00001000);//BGR order
ST7735S_Write(ST7735_CM,0x3a);
ST7735S_Write(ST7735_DT,0x05);//16bits/Pixel(RGB565)
//ST7735S_Write(ST7735_DT,0x06);//18bits/Pixel(RGB666)
//ST7735S_Write(ST7735_DT,0x03);//Format RGB444
ST7735S_Write(ST7735_CM,0x20);//Display Inversion OFF
ST7735S_Write(ST7735_CM,0x38);//Idle mode off
ST7735S_Write(ST7735_CM,0x26);//
ST7735S_Write(ST7735_DT,0x08);
//ST7735S_Write(ST7735_DT,0x04);
//ST7735S_Write(ST7735_DT,0x02);
ST7735S_Write(ST7735_CM,0x13);
ST7735S_Write(ST7735_CM,0x29);
//コラムアドレスセット X=10
ST7735S_Write(ST7735_CM,0x2a);
ST7735S_Write(ST7735_DT,0x00);
ST7735S_Write(ST7735_DT,0x00);
ST7735S_Write(ST7735_DT,0x00);
ST7735S_Write(ST7735_DT,0x9F);//127
//Row Address Set Y=10
ST7735S_Write(ST7735_CM,0x2b);
ST7735S_Write(ST7735_DT,0x00);
ST7735S_Write(ST7735_DT,0x00);
ST7735S_Write(ST7735_DT,0x00);
ST7735S_Write(ST7735_DT,0x7F);//159
ST7735S_Write(ST7735_CM,0x2c);
ST7735_A0=1;
SPI2_Start();
for(i=0; i<20480;i++)
{
/*SPI2_Write(backColor_R);
SPI2_Write(backColor_G);
SPI2_Write(backColor_B);*/
SPI2_Write(0xFF);
SPI2_Write(0xFF);
SPI2_Write(0xFF);
}
SPI2_Stop();
ST7735S_Write(ST7735_CM,0x3a);
ST7735S_Write(ST7735_DT,0x55);//16bits/Pixel(RGB565)
//ST7735S_Demo();
}
//_CD Command 0 Data:1
//_data byte data
void ST7735S_Write(uint8_t _CD, uint8_t _data)
{
ST7735_A0=_CD;
SPI2_Start();
SPI2_Write(_data);
SPI2_Stop();
}
//_xs 0
//_xe 0
//_ys 0
//_ys 127
void ST7735S_AddSet(uint8_t _xs,uint8_t _xe, uint8_t _ys,uint8_t _ye)
{
//コラムアドレスセット
ST7735S_Write(ST7735_CM,0x2a);
ST7735S_Write(ST7735_DT,0x00);
ST7735S_Write(ST7735_DT,_ys);
ST7735S_Write(ST7735_DT,0x00);
ST7735S_Write(ST7735_DT,_ye);//127
//Row Address Set
ST7735S_Write(ST7735_CM,0x2b);
ST7735S_Write(ST7735_DT,0x00);
ST7735S_Write(ST7735_DT,_xs);
ST7735S_Write(ST7735_DT,0x00);
ST7735S_Write(ST7735_DT,_xe);//159
}
void ST7735S_WriteChar8X(const uint8_t* _ch)
{
uint8_t i,j,ch,buf;
uint8_t* psv_pt;
psv_pt=(uint8_t*)_ch;
ST7735S_Write(ST7735_CM,0x2c);
ST7735_A0= ST7735_DT;
SPI2_Start();
for(i=0; i<8; i++)
{
ch=*(psv_pt++);
j=0x01;
do
{
buf=ch&j;
if(buf!=0x00)
{
SPI2_Write(0xFC);
SPI2_Write(0xFC);
SPI2_Write(0x00);
}
else{
SPI2_Write(0x00);
SPI2_Write(0x00);
SPI2_Write(0x00);
}
j<<=1;
}while(j!=0x00);
}
SPI2_Stop();
}
void ST7735S_WriteChar8Y(const uint8_t* _ch,uint8_t _R,uint8_t _G, uint8_t _B)
{
uint8_t x,y,ch,buf;
uint8_t* psv_pt;
psv_pt=(uint8_t*)_ch;
ST7735S_Write(ST7735_CM,0x2c);
ST7735_A0= ST7735_DT;
SPI2_Start();
for(x=0; x<8; x++)
{
ch=*(psv_pt++);
y=0x01;
do
{
buf=ch&y;
if(buf!=0x00)
{
SPI2_Write(_R);
SPI2_Write(_G);
SPI2_Write(_B);
}
else{
SPI2_Write(backColor_R);
SPI2_Write(backColor_G);
SPI2_Write(backColor_B);
}
y<<=1;
}while(y!=0x00);
}
SPI2_Stop();
}
void ST7735S_WriteChar10Y(const uint8_t* _ch, uint8_t _R, uint8_t _G, uint8_t _B)
{
uint8_t x,y,bitmask,buf;
uint8_t ch[2];
uint8_t* psv_pt;
psv_pt=(uint8_t*)_ch;
ST7735S_Write(ST7735_CM,0x2c);
ST7735_A0= ST7735_DT;
SPI2_Start();
for(x=0; x<10; x++)
{
for(y=0; y<2; y++)
{
ch[0]=*(psv_pt++);
bitmask=0x01;
do
{
buf=ch[0]&bitmask;
if(buf!=0x00)
{
SPI2_Write(_R);
SPI2_Write(_G);
SPI2_Write(_B);
}
else{
SPI2_Write(backColor_R);
SPI2_Write(backColor_G);
SPI2_Write(backColor_B);
}
bitmask<<=1;
if(y==1 && bitmask==0x04)
bitmask=0x00;
}while(bitmask!=0x00);
}
}
SPI2_Stop();
}
void ST7735S_WriteChar12Y(const uint8_t* _ch)
{
uint8_t x,y,bitmask,buf;
uint8_t ch[2];
uint8_t* psv_pt;
psv_pt=(uint8_t*)_ch;
ST7735S_Write(ST7735_CM,0x2c);
ST7735_A0= ST7735_DT;
SPI2_Start();
for(x=0; x<12; x++)
{
for(y=0; y<2; y++)
{
ch[0]=*(psv_pt++);
bitmask=0x01;
do
{
buf=ch[0]&bitmask;
if(buf!=0x00)
{
SPI2_Write(char12Y_R);
SPI2_Write(char12Y_G);
SPI2_Write(char12Y_B);
}
else{
SPI2_Write(backColor_R);
SPI2_Write(backColor_G);
SPI2_Write(backColor_B);
}
bitmask<<=1;
if(y==1 && bitmask==0x10)
bitmask=0x00;
}while(bitmask!=0x00);
}
}
SPI2_Stop();
}
void ST7735S_WriteChar1216Y(const uint8_t* _ch, uint8_t _R, uint8_t _G, uint8_t _B)
{
uint8_t x,y,bitmask,buf;
uint8_t ch[2];
uint8_t* psv_pt;
psv_pt=(uint8_t*)_ch;
ST7735S_Write(ST7735_CM,0x2c);
ST7735_A0= ST7735_DT;
SPI2_Start();
for(x=0; x<12; x++)
{
for(y=0; y<2; y++)
{
ch[0]=*(psv_pt++);
bitmask=0x01;
do
{
buf=ch[0]&bitmask;
if(buf!=0x00)
{
SPI2_Write(_R);
SPI2_Write(_G);
SPI2_Write(_B);
}
else{
SPI2_Write(backColor_R);
SPI2_Write(backColor_G);
SPI2_Write(backColor_B);
}
bitmask<<=1;
}while(bitmask!=0x00);
}
}
SPI2_Stop();
}
void ST7735S_WriteChar1616Y(const uint8_t* _ch)
{
uint8_t x,y,bitmask,buf;
uint8_t ch[2];
uint8_t* psv_pt;
psv_pt=(uint8_t*)_ch;
ST7735S_Write(ST7735_CM,0x2c);
ST7735_A0= ST7735_DT;
SPI2_Start();
for(x=0; x<16; x++)
{
for(y=0; y<2; y++)
{
ch[0]=*(psv_pt++);
bitmask=0x01;
do
{
buf=ch[0]&bitmask;
if(buf!=0x00)
{
SPI2_Write(char16Y_R);
SPI2_Write(char16Y_G);
SPI2_Write(char16Y_B);
}
else{
SPI2_Write(backColor_R);
SPI2_Write(backColor_G);
SPI2_Write(backColor_B);
}
bitmask<<=1;
}while(bitmask!=0x00);
}
}
SPI2_Stop();
}
/*---------------------------------------------------**/
void ST7735S_Printf88(uint8_t _xs, uint8_t _ys, uint8_t *txt, uint8_t _length,uint8_t _R,uint8_t _G, uint8_t _B)
{
unsigned int i;
unsigned int buf[5];
uint8_t num;
//アルファベット
for(i=0; i<_length; i++)
{
ST7735S_AddSet(_xs,_xs+7,_ys,_ys+7);
//num=*txt-char88Offset;
if(*txt==0x20)num=0;
if(*txt==0x2D)num=1;
if(0x30<=*txt && *txt<=0x39)
{
num=*txt-0x30+char88OffsetNumber;
}
if(0x61<=*txt && *txt<=0x7A)
{
num=*txt-char88Offset+char88OffsetNumber+9;
}
ST7735S_WriteChar8Y(char8Set[num],_R,_G,_B);
txt++;
_xs+=7;
}
}
void ST7735S_PrintInt1010(uint8_t xs, uint8_t ys, uint16_t _val,uint8_t _R,uint8_t _G, uint8_t _B)
{
unsigned int i;
unsigned int buf[5];
if(_val>=0xFFFF) return;
buf[0]=_val/10000;
buf[1]=(_val%10000)/1000;
buf[2]=(_val%1000)/100;
buf[3]=(_val%100)/10;
buf[4]=_val%10;
//アルファベット
for(i=0; i<=4; i++)
{
ST7735S_AddSet(xs,xs+9,ys,ys+9);
ST7735S_WriteChar10Y(char10Set[buf[i]+2],_R,_G,_B);
xs+=10;
}
}
void ST7735S_Printf1010(uint8_t _xs, uint8_t _ys, uint8_t *txt, uint8_t _length,uint8_t _R,uint8_t _G, uint8_t _B)
{
unsigned int i;
//unsigned int buf[5];
uint8_t num;
for(i=0; i<_length; i++)
{
ST7735S_AddSet(_xs,_xs+9,_ys,_ys+9);
if(*txt==0x20)num=0;
if(*txt==0x2E)num=1;
if(0x30<=*txt && *txt<=0x3A)
{
num=*txt-0x30+char1010OffsetNumber;
}
if(0x41<=*txt && *txt<=0x5A)
{
num=*txt-char1010OffsetAZ;
}
if(*txt==0x20)num=0;
if(*txt==0x2E)num=1;
ST7735S_WriteChar10Y(char10Set[num],_R,_G,_B);
txt++;
_xs+=10;
}
}
void ST7735S_Printf1216(uint8_t _xs, uint8_t _ys, uint8_t *txt, uint8_t _length,uint8_t _R,uint8_t _G, uint8_t _B)
{
unsigned int i;
//unsigned int buf[5];
uint8_t num;
for(i=0; i<_length; i++)
{
ST7735S_AddSet(_xs,_xs+11,_ys,_ys+15);
if(*txt==0x20)num=0;
if(*txt==0x2E)num=1;
if(0x30<=*txt && *txt<=0x3A)
{
num=*txt-0x30+char1216OffsetNumber;
}
if(0x41<=*txt && *txt<=0x5A)
{
num=*txt-char1216OffsetAZ;
}
if(*txt==0x20)num=0;
if(*txt==0x2E)num=1;
ST7735S_WriteChar1216Y(char1216Set[num],_R,_G,_B);
txt++;
_xs+=11;
}
}
void ST7735S_PrintChar1010(uint8_t _xs, uint8_t _ys, uint8_t _ch,uint8_t _R,uint8_t _G, uint8_t _B)
{
uint8_t num;
if(_ch==0x20)num=0;
if(_ch==0x2E)num=1;
if(0x30<=_ch && _ch<=0x3A)
{
num=_ch-0x30+char1010OffsetNumber;
}
if(0x41<=_ch && _ch<=0x5A)
{
num=_ch-char1010OffsetAZ;
}
ST7735S_AddSet(_xs,_xs+9,_ys,_ys+9);
ST7735S_WriteChar10Y(char10Set[num],_R,_G,_B);
}
/*------------------------------------------------------*/
void ST7735S_Rectangle(uint8_t _xs, uint8_t _ys, uint8_t _xsize, uint8_t _ysize,uint8_t _R,uint8_t _G, uint8_t _B)
{
uint8_t x,y;
ST7735S_AddSet(_xs,_xs+_xsize,_ys,_ys+_ysize);
ST7735S_Write(ST7735_CM,0x2c);
ST7735_A0= ST7735_DT;
SPI2_Start();
for(x=0; x<=_xsize; x++)
{
for(y=0; y<=_ysize; y++)
{
SPI2_Write(_R);
SPI2_Write(_G);
SPI2_Write(_B);
}
}
SPI2_Stop();
}
void ST7735S_PaintALL(uint8_t _R,uint8_t _G,uint8_t _B)
{
unsigned int i;
//コラムアドレスセット X=10
ST7735S_Write(ST7735_CM,0x2a);
ST7735S_Write(ST7735_DT,0x00);
ST7735S_Write(ST7735_DT,0x00);
ST7735S_Write(ST7735_DT,0x00);
ST7735S_Write(ST7735_DT,0x7F);//127
//Row Address Set Y=10
ST7735S_Write(ST7735_CM,0x2b);
ST7735S_Write(ST7735_DT,0x00);
ST7735S_Write(ST7735_DT,0x00);
ST7735S_Write(ST7735_DT,0x00);
ST7735S_Write(ST7735_DT,0x9F);//159
ST7735S_Write(ST7735_CM,0x2c);
ST7735_A0=1;
SPI2_Start();
for(i=0; i<20480;i++)
{
SPI2_Write(_R);
SPI2_Write(_G);
SPI2_Write(_B);
}
SPI2_Stop();
}
void ST7735S_Demo(void)
{
int x,y,i,j;
#define testST7735S
#ifdef testST7735S
//長方形
/* for(i=0; i<=3; i++)
{
ST7735S_Rectangle(0,(uint8_t)10*i,10,10,0x30,0x00,0xF0);
}*/
//数字1010
x=0; y=0;
//for(i=0; i<13; i++)
for(i=0; i<13; i++)
{
ST7735S_AddSet(x,x+9,y,y+9);
ST7735S_WriteChar10Y(char10Set[i],0x30,0x40,0x40);
x+=10;
}
__delay_ms(100);
//アルファベット1010
x=0; y=20; j=0;
for(i=13; i<13+26; i++)
{
ST7735S_AddSet(x,x+9,y,y+9);
ST7735S_WriteChar10Y(char10Set[i],0x30,0x00,0xF0);
x+=10;
j++;
if(j%15==0)
{
y+=12;
x=0;
}
}
__delay_ms(100);
//数字88
x=0; y=45; j=0;
for(i=0; i<12; i++)
{
ST7735S_AddSet(x,x+7,y,y+7);
ST7735S_WriteChar8Y(char8Set[i],0x10,0x30,0x70);
x+=8;
j++;
if(j%15==0)
{
y+=10;
x=0;
}
}
__delay_ms(100);
//アルファベット88
x=0; y=55; j=0;
for(i=12; i<12+26; i++)
{
ST7735S_AddSet(x,x+7,y,y+7);
ST7735S_WriteChar8Y(char8Set[i],0x10,0x40,0xA0);
x+=8;
j++;
if(j%20==0)
{
y+=10;
x=0;
}
}
__delay_ms(100);
//数字1216
x=0; y=75; j=0;
for(i=0; i<13; i++)
{
ST7735S_AddSet(x,x+11,y,y+15);
ST7735S_WriteChar1216Y(char1216Set[i],0x10,0x30,0xF0);
x+=12;
}
__delay_ms(100);
//アルファベット1216
x=0; y=93; j=0;
for(i=14; i<14+26; i++)
{
ST7735S_AddSet(x,x+11,y,y+15);
ST7735S_WriteChar1216Y(char1216Set[i],0xF0,0x70,0x00);
x+=12;
j++;
if(j%13==0)
{
y+=17;
x=0;
}
}
__delay_ms(100);
#endif
}
OV7670Camera.h
/*
* File: OV7670Camera.h
* Author: h
*
* Created on 2022/01/05, 5:22
*/
#ifndef OV7670CAMERA_H
#define OV7670CAMERA_H
#ifdef __cplusplus
extern "C" {
#endif
#include <xc.h>
#include <stdbool.h>
#include <stdio.h>
//カメラ割込み3線対応変数-----------------------
typedef struct{
uint8_t Hcolor[10];//160*120*2未使用。(未使用:sprite1を使用。)
uint16_t HpixCounter;//水平方向ピクセルカウンタ
uint16_t LineCounter;//垂直方向行番号カウンタ
uint16_t portBval;//カメラパラレル8ビット受信変数:未使用(DMA使用のため)
bool fg_TFT_Send;//行データ受信完了フラグ:未使用(DMA使用のため)
}_OV7670;
extern volatile _OV7670 OV7670;
extern void OV7670_Init(void);
#ifdef __cplusplus
}
#endif
#endif /* OV7670CAMERA_H */
OV7670Camera.c
#include "OV7670Camera.h"
volatile _OV7670 OV7670;
//OV7670 データ受信用変数初期化関数。
void OV7670_Init(void)
{
OV7670.HpixCounter=0;//ピクセルカウンタ
OV7670.LineCounter=0;//行カウンタ
OV7670.fg_TFT_Send=false;//行データ受信フラグ:未使用
TRISE=0x000000FF;//カメラ8ビットパラレルデータ入力ポート
}
OV7670_Code.h
#include <xc.h>
#define OV7670deviceAdd 0x42
#define initRegNumber 166
//今回は使用せず。
struct regval_list{
uint8_t reg_num;
uint16_t value;
};
extern const uint8_t OV7670Reg[166][2];
extern void OV7670_RegInit( const uint8_t pt[][2]);
extern void camInit(void);
extern void cammode_select(void);
extern void setColor( const uint8_t pt[][2]);
extern void setRes( const uint8_t pt[][2]);
extern void stopAEC(void);
OV7670_Code.c
#include "PIC32_I2C2SCCB.h"
#include "OV7670_arCode.h"
#include "peripheral.h"
//OV7670レジスタ初期化値
const uint8_t OV7670Reg[166][2]=
{
{0x3a,0x05},
{0x12,0},
#define QQVGA2
#ifdef QQVGA1
{0x17, 0x16},//HSTART
{0x18, 0x04},//HSTOP
{0x32, 0xA4},//HREF
{0x19, 0x02},//VSTART
{0x1a, 0x7a}, //VSTOP
{0x03, 0x0a}, //VREF
#endif
#ifdef QQVGA2
{0x17, 0x16},//HSTART
{0x18, 0x04},//HSTOP
{0x32, 0x80},//HREF
{0x19, 0x02},//VSTART
{0x1a, 0x7a}, //VSTOP
{0x03, 0x0a}, //VREF
#endif
/* Gamma curve values */
#define GammaCurve4
#ifdef GammaCurve1
{0x7a, 0x20}, {0x7b, 0x10},
{0x7c, 0x1e}, {0x7d, 0x35},
{0x7e, 0x5a}, {0x7f, 0x69},
{0x80, 0x76}, {0x81, 0x80},
{0x82, 0x88}, {0x83, 0x8f},
{0x84, 0x96}, {0x85, 0xa3},
{0x86, 0xaf}, {0x87, 0xc4},
{0x88, 0xd7}, {0x89, 0xe8},
#endif
#ifdef GammaCurve2
{0x7a, 0x40}, {0x7b, 0x04},
{0x7c, 0x08}, {0x7d, 0x10},
{0x7e, 0x20}, {0x7f, 0x28},
{0x80, 0x30}, {0x81, 0x38},
{0x82, 0x40}, {0x83, 0x48},
{0x84, 0x50}, {0x85, 0x60},
{0x86, 0x70}, {0x87, 0x90},
{0x88, 0xB0}, {0x89, 0xD0},
#endif
//0.8
#ifdef GammaCurve3
{0x7a, 0x4D}, {0x7b, 0x01},
{0x7c, 0x03}, {0x7d, 0x08},
{0x7e, 0x13}, {0x7f, 0x19},
{0x80, 0x1F}, {0x81, 0x26},
{0x82, 0x2D}, {0x83, 0x34},
{0x84, 0x3b}, {0x85, 0x4b},
{0x86, 0x5b}, {0x87, 0x7c},
{0x88, 0xA0}, {0x89, 0xC5},
#endif
//0.5
#ifdef GammaCurve4
{0x7a, 0x73}, {0x7b, 0x00},
{0x7c, 0x00}, {0x7d, 0x01},
{0x7e, 0x04}, {0x7f, 0x06},
{0x80, 0x09}, {0x81, 0x0C},
{0x82, 0x10}, {0x83, 0x14},
{0x84, 0x19}, {0x85, 0x24},
{0x86, 0x31}, {0x87, 0x51},
{0x88, 0x79}, {0x89, 0xA9},
#endif
//1.5
#ifdef GammaCurve5
{0x7a, 0x22}, {0x7b, 0x1F},
{0x7c, 0x2D}, {0x7d, 0x3F},
{0x7e, 0x5A}, {0x7f, 0x64},
{0x80, 0x6E}, {0x81, 0x77},
{0x82, 0x7F}, {0x83, 0x87},
{0x84, 0x8E}, {0x85, 0x9C},
{0x86, 0xA8}, {0x87, 0xBF},
{0x88, 0xD3}, {0x89, 0xE6},
#endif
{0x13,0x80|0x40},//COM8
{0x00,0},//GAIN
{0x10,0},
{0x0d,0x40},//COM4
{0x14,0x18},//COM9
{0xa5,0x05},//BD50MAX
{0xab,0x07},
{0x24,0x95},//AEW
{0x25,0x33},//AEB
{0x26,0xe3},
{0x9f,0x78},//AEC,AGC
{0xa0,0x68},
{0xa1, 0x03},
{0xa6,0xd8},
{0xa7,0xd8},
{0xa8,0xf0},
{0xa9,0x90},
{0xaa,0x94},
{0x13,0x80|0x40|0x04|0x01},
{0x30,0},
{0x31,0},
{0x0e,0x61},
{0x0f,0x4b},
{0x16, 0x02},
{0x1e,0x07},
{0x21, 0x02},
{0x22, 0x91},
{0x29, 0x07},
{0x33, 0x0b},
{0x35, 0x0b},
{0x37, 0x1d},
{0x38, 0x71},
{0x39, 0x2a},
{0x3c,0x78},
{0x4d, 0x40},
{0x4e, 0x20},
{0x69,0},
{0x74,0x10},
{0x8d, 0x4f},
{0x8e, 0},
{0x8f, 0},
{0x90, 0},
{0x91, 0},
{0x96, 0},
{0x9a, 0},
{0xb0, 0x84},
{0xb1, 0x00},
{0xb2, 0x0e},
{0xb3, 0x82},
{0xb8, 0x0a},
{0x59, 0x88}, {0x5a, 0x88},
{0x5b, 0x44}, {0x5c, 0x67},
{0x5d, 0x49}, {0x5e, 0x0e},
{0x6c, 0x0a}, {0x6d, 0x55},
{0x6e, 0x11}, {0x6f, 0x9e},
{0x4f, 0x99}, {0x50, 0x99},
{0x51, 0}, {0x52, 0x28},
{0x53, 0x71}, {0x54, 0x99},
{0x58, 0x9E},
{0x41,0x08},
{0x3f,0},
{0x75, 0x05},
{0x76,0xe1},
{0x4c, 0},
{0x77, 0x01},
{0x3d,0x48},
{0x4b, 0x09},
{0xc9, 0x60},
{0x56, 0x40},
{0x34, 0x11},
{0x3b,0x02|0x10},
{0xa4, 0x82},
{0x55, 0x18},
{0x56, 0x50},
{0x6F,0x9F},
{0xff, 0xff} /* END MARKER */
};
//OV7670初期値設定関数
void OV7670_RegInit(const uint8_t pt[][2])
{
uint8_t ret;
uint16_t i;
i=0;
do
{
ret=I2C2_b2Write(OV7670deviceAdd,pt[i][0],pt[i][1],true);
if(ret!=true)
{
printf("error[%x]\r",i);
}
i++;
}while(pt[i][0]!=0xFF);
}
//カメラ初期化関数
void camInit(void){
I2C2_b2Write(OV7670deviceAdd,0x12, 0x80,true); //レジスタリセット
__delay_ms(100);
__delay_ms(100);
__delay_ms(100);
OV7670_RegInit(OV7670Reg);
//以下2行はなくてもいいかも。
I2C2_b2Write(OV7670deviceAdd,0x15,0x20,true);//PCLK does not toggle on HBLANK.
I2C2_b2Write(OV7670deviceAdd,0x13, 0xEf,true); // Set ACE
}
//カメラ画面サイズ、カラー設定、クロック設定
void cammode_select(void)
{
uint8_t clkspm,clkspc,com7s;
// QQVGA
com7s = 0x00;
//カラーバーの出力RGB444 "RGBx"の順番 カメラモードの出力"BGRx"
//混乱します。RGB565の使用をおすすめします。
//#define testpatternColorBar
#ifdef testpatternColorBar
I2C2_b2Write(OV7670deviceAdd,0x70, 0x3a,true);
I2C2_b2Write(OV7670deviceAdd,0x71, 0xB5,true);
#else
I2C2_b2Write(OV7670deviceAdd,0x70, 0x3a,true);
I2C2_b2Write(OV7670deviceAdd,0x71, 0x35,true);
#endif
I2C2_b2Write(OV7670deviceAdd,0x72, 0x22,true);
I2C2_b2Write(OV7670deviceAdd,0x73, 0xf2,true);
I2C2_b2Write(OV7670deviceAdd,0x0c, 0x04,true);
I2C2_b2Write(OV7670deviceAdd,0x3e, 0x1a,true);
I2C2_b2Write(OV7670deviceAdd,0xa2, 0x02,true);
//カラー設定 RGB565をお勧めします。
//COM7(0x12) :画面フォーマット指定 QQVGA
// :RGBフォーマット指定 RGB使用
com7s = 4; // RGB565
I2C2_b2Write(OV7670deviceAdd,0x40, 0xD0,true); //RGB565
//0x11CLKRCレジスタでクロックを分周して速度を変更します。
//I2C2_b2Write(OV7670deviceAdd,0x6B, 0x4a,true); // PLL 4times
I2C2_b2Write(OV7670deviceAdd,0x6B, 0x0a,true); // PLL 1times
//I2C2_b2Write(OV7670deviceAdd,0x11, 0x81,true); // ON ReferenceCLK enabled.
I2C2_b2Write(OV7670deviceAdd,0x11, 0x82,true); // セラロック+74HC04クロック:Speed20Mhz/6=3.3Mhz
#ifdef testpatternColorBar
com7s+=2;//color bar
#endif
I2C2_b2Write(OV7670deviceAdd,0x12 , com7s,true);
//レンズ位置 調節すると写る場合があるかも、今回は使用せず。
I2C2_b2Write(OV7670deviceAdd,0x62 , 0x00,true); //x
I2C2_b2Write(OV7670deviceAdd,0x63 , 0x00,true); //y
//上下さかさまVFlipMirror
I2C2_b2Write(OV7670deviceAdd,0x1E , 0x30,true);
//I2C2_b2Write(OV7670deviceAdd,0x41 , 0x38,true);
//
I2C2_b2Write(OV7670deviceAdd,0x41 , 0x38,true);
//sharpness
I2C2_b2Write(OV7670deviceAdd,0x3F, 0x03,true);
//AWB R,B
I2C2_b2Write(OV7670deviceAdd,0x64 , 0x01,true);
I2C2_b2Write(OV7670deviceAdd,0x46 , 0x01,true);
//black level Control
I2C2_b2Write(OV7670deviceAdd,0xB1 , 0x04,true);
//ADC Control
//I2C2_b2Write(OV7670deviceAdd,0x20 , 0x0F,true); //×0.66倍
I2C2_b2Write(OV7670deviceAdd,0x20 , 0x04,true); //×1倍
//Contrast Center automatically
I2C2_b2Write(OV7670deviceAdd,0x58 , 0x1E,true);
}
//カラー初期化関数
void setColor( const uint8_t pt[][2])
{
OV7670_RegInit(pt);
}
//画面初期化設定
void setRes( const uint8_t pt[][2])
{
I2C2_b2Write(OV7670deviceAdd,0x0c, 0x04,true); // REG_COM3 enable scaling
OV7670_RegInit(pt);
}
//AEC自動輝度調整を停止関数
void stopAEC(void)
{
//AEC停止
I2C2_b2Write(OV7670deviceAdd,0x13,0xC0,true);//AE停止
I2C2_b2Write(OV7670deviceAdd,0x10,0x64,true);//AECH
}