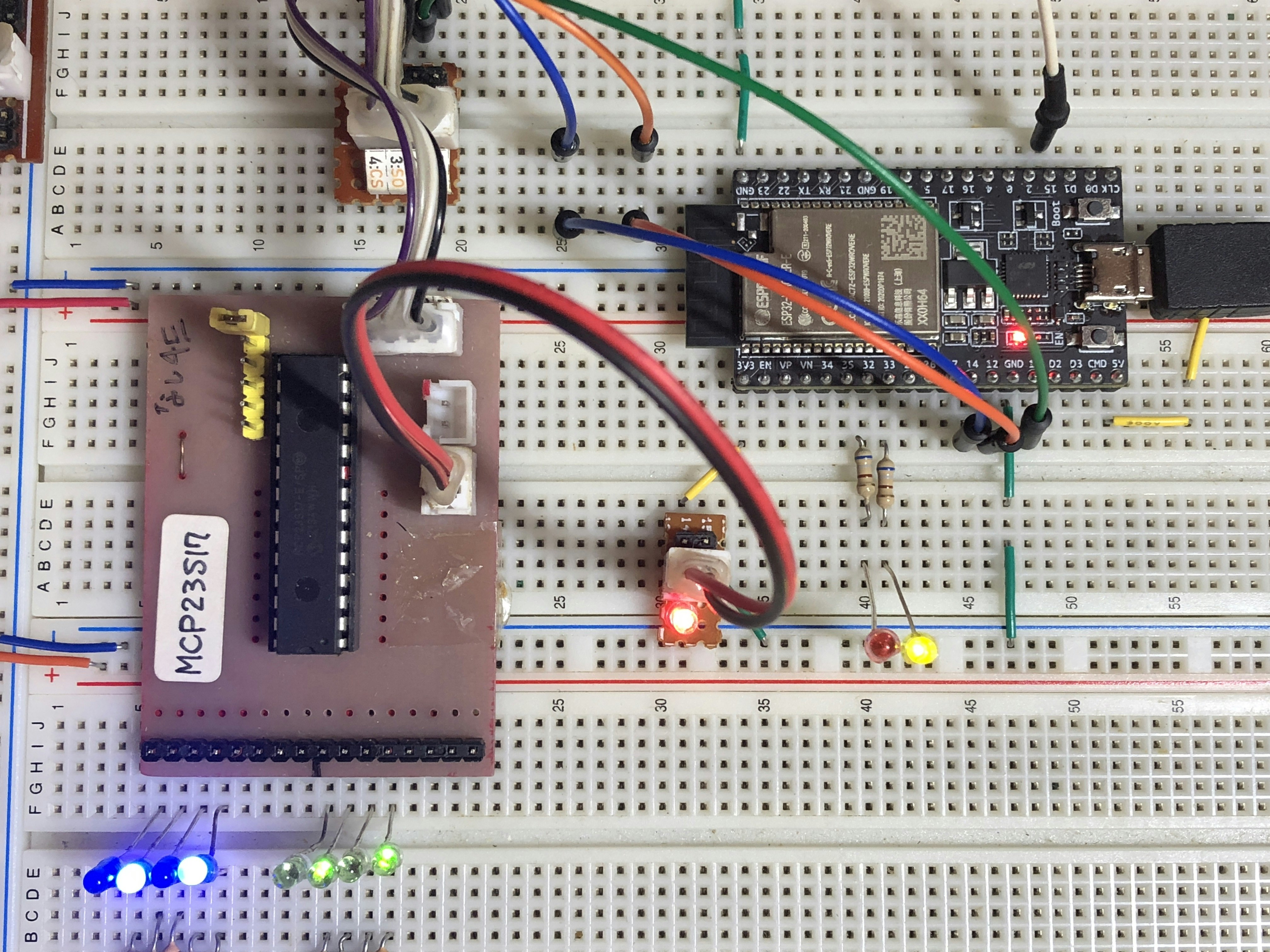
SPI IOエキスパンダーMCP23S17を対象にして、ESP-IDF driverでspi master通信を行いました。
環境
VScode+platformIO
platform = espressif32
board = my_esp32dev
framework = espidf
※ボードは、esp32devを修正した自作JSONファイル。
<参考>
SPIドライバー関連
本家Espressif解説
youtubeわかりやすいコード。
main.c
// Master SPI (VSPI) initiation
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "driver/spi_master.h"
#include "driver/gpio.h"
#include "sdkconfig.h"
#include "esp_log.h"
static const char TAG[] = "HSPI";
//OUTPUTピン Kconfig.projbuildに詳細設定
#define GPIO_OUTPUT_IO_0 CONFIG_GPIO_OUTPUT_0
#define GPIO_OUTPUT_IO_1 CONFIG_GPIO_OUTPUT_1
#define GPIO_OUTPUT_PIN_SEL ((1ULL<<GPIO_OUTPUT_IO_0) | (1ULL<<GPIO_OUTPUT_IO_1))
void app_main(void)
{
static bool val1,val2;
val1=true;
val2=false;
//Output mode pin----------------------------
//zero-initialize the config structure.
gpio_config_t io_conf = {};
//disable interrupt
io_conf.intr_type = GPIO_INTR_DISABLE;
//set as output mode
io_conf.mode = GPIO_MODE_OUTPUT;
//bit mask of the pins that you want to set,e.g.GPIO32/33
io_conf.pin_bit_mask = GPIO_OUTPUT_PIN_SEL;
//disable pull-down mode
io_conf.pull_down_en = 0;
//disable pull-up mode
io_conf.pull_up_en = 0;
//configure GPIO with the given settings
gpio_config(&io_conf);
ESP_LOGI(TAG,"spi_bus init");
spi_bus_config_t buscfg =
{
.miso_io_num = 12,
.mosi_io_num = 13,
.sclk_io_num = 14,
.quadwp_io_num = -1,
.quadhd_io_num = -1,
.max_transfer_sz = 32,
};
spi_device_interface_config_t devcfg =
{
.clock_speed_hz = 16*1000*1000, //16Mhz Clock out at 1 MHz with 1 us cycle
.mode = 0, // SPI mode 0 - the clock signal starts with a low signal
.spics_io_num = 15, // CS pin
.queue_size = 7, // Queue 7 transactions at a time
};
// Initialize the SPI
spi_bus_initialize(HSPI_HOST, &buscfg, 1);
// Define SPI handle
spi_device_handle_t spi2;
spi_bus_add_device(HSPI_HOST, &devcfg, &spi2);
// SPI transaction structure
spi_transaction_t trans;
memset(&trans, 0, sizeof(trans));
trans.length = 8*3; // length in bits
int8_t test_str[] = {0x4E,0x0A,0xA8}; //MCP23S17 deviceAddress 0x4E
trans.tx_buffer = &test_str; // pointer to data to be transmitted
spi_device_transmit(spi2, &trans);
memset(&trans, 0, sizeof(trans));
trans.length = 8*3; // length in bits
test_str[1]=0x00;
test_str[2]=0x00;
trans.tx_buffer = &test_str; // pointer to data to be transmitted
spi_device_transmit(spi2, &trans);
memset(&trans, 0, sizeof(trans));
trans.length = 8*3; // length in bits
test_str[1]=0x10;
test_str[2]=0x00;
trans.tx_buffer = &test_str; // pointer to data to be transmitted
spi_device_transmit(spi2, &trans);
while (1)
{
memset(&trans, 0, sizeof(trans));
trans.length = 8*3; // length in bits
test_str[1] = 0x0A;
test_str[2] = 0x55;
trans.tx_buffer = &test_str; // pointer to data to be transmitted
spi_device_transmit(spi2, &trans);
memset(&trans, 0, sizeof(trans));
trans.length = 8*3; // length in bits
test_str[1] = 0x1A;
test_str[2] = 0x55;
trans.tx_buffer = &test_str; // pointer to data to be transmitted
spi_device_transmit(spi2, &trans);
gpio_set_level(GPIO_OUTPUT_IO_0,val1);
gpio_set_level(GPIO_OUTPUT_IO_1,val2);
val1=!val1;
val2=!val2;
printf("running\n");
vTaskDelay(500 / portTICK_PERIOD_MS); // Every 10 ms
memset(&trans, 0, sizeof(trans));
trans.length = 8*3; // length in bits
test_str[1] = 0x0A;
test_str[2] = 0xAA;
trans.tx_buffer = &test_str; // pointer to data to be transmitted
spi_device_transmit(spi2, &trans);
memset(&trans, 0, sizeof(trans));
trans.length = 8*3;
test_str[1] = 0x1A;
test_str[2] = 0xAA;
trans.tx_buffer = &test_str; // pointer to data to be transmitted
spi_device_transmit(spi2, &trans);
gpio_set_level(GPIO_OUTPUT_IO_0,val1);
gpio_set_level(GPIO_OUTPUT_IO_1,val2);
val1=!val1;
val2=!val2;
printf("running\n");
vTaskDelay(500 / portTICK_PERIOD_MS); // Every 10 ms
}
}
kconfig.projbuild
menu "Example Configuration"
config GPIO_OUTPUT_0
int "GPIO output pin 0"
range 0 39
default 32
help
GPIO pin number to be used as GPIO_OUTPUT_IO_0.
config GPIO_OUTPUT_1
int "GPIO output pin 1"
range 0 39
default 33
help
GPIO pin number to be used as GPIO_OUTPUT_IO_1.
config GPIO_INPUT_0
int "GPIO input pin 0"
range 0 39
default 34
help
GPIO pin number to be used as GPIO_INPUT_IO_0.
config GPIO_INPUT_1
int "GPIO input pin 1"
range 0 39
default 35
help
GPIO pin number to be used as GPIO_INPUT_IO_1.
endmenu
platformio.ini
[env:my_esp32dev]
platform = espressif32
board = my_esp32dev
framework = espidf
board_upload.flashsize = 8MB
board_upload.maximum_size = 8388608
#build_flags = -DBOARD_HAS_PSRAM
board_upload.maximum_ram_size = 4536000
board_build.partitions = my_no_ota.csv
my_esp32dev.json
{
"build": {
"arduino":{
"ldscript": "esp32_out.ld"
},
"core": "esp32",
"extra_flags": "-DARDUINO_ESP32_DEV -DBOARD_HAS_PSRAM -mfix-esp32-psram-cache-issue",
"f_cpu": "240000000L",
"f_flash": "40000000L",
"flash_mode": "dio",
"mcu": "esp32",
"variant": "esp32"
},
"connectivity": [
"wifi",
"bluetooth",
"ethernet",
"can"
],
"debug": {
"openocd_board": "esp-wroom-32.cfg"
},
"frameworks": [
"arduino",
"espidf"
],
"name": "my ESP32 dev",
"upload": {
"flash_size": "8MB",
"maximum_ram_size": 327680,
"maximum_size": 8000000,
"require_upload_port": true,
"speed": 460800
},
"url": "https://en.wikipedia.org/wiki/ESP32",
"vendor": "aki Espressif"
}