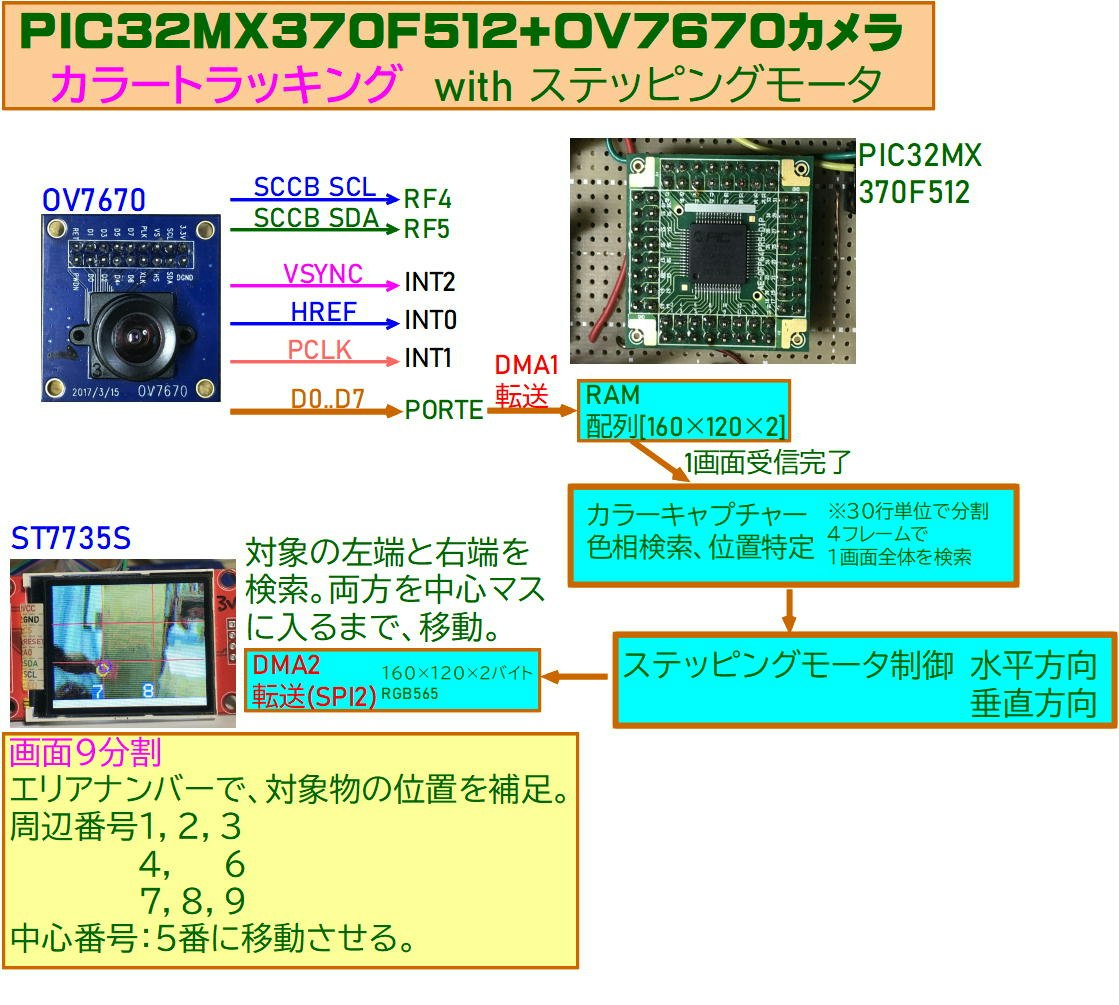
OV7670 カラートラッキング
随時更新予定。
24.11.14 DMAモジュールの停止と復帰を改変。DCH1CONbits.CHENビットの使用に変更。
ステッピングモータ2個で、水平、垂直方向にカメラを移動させ、対象物を追尾します。


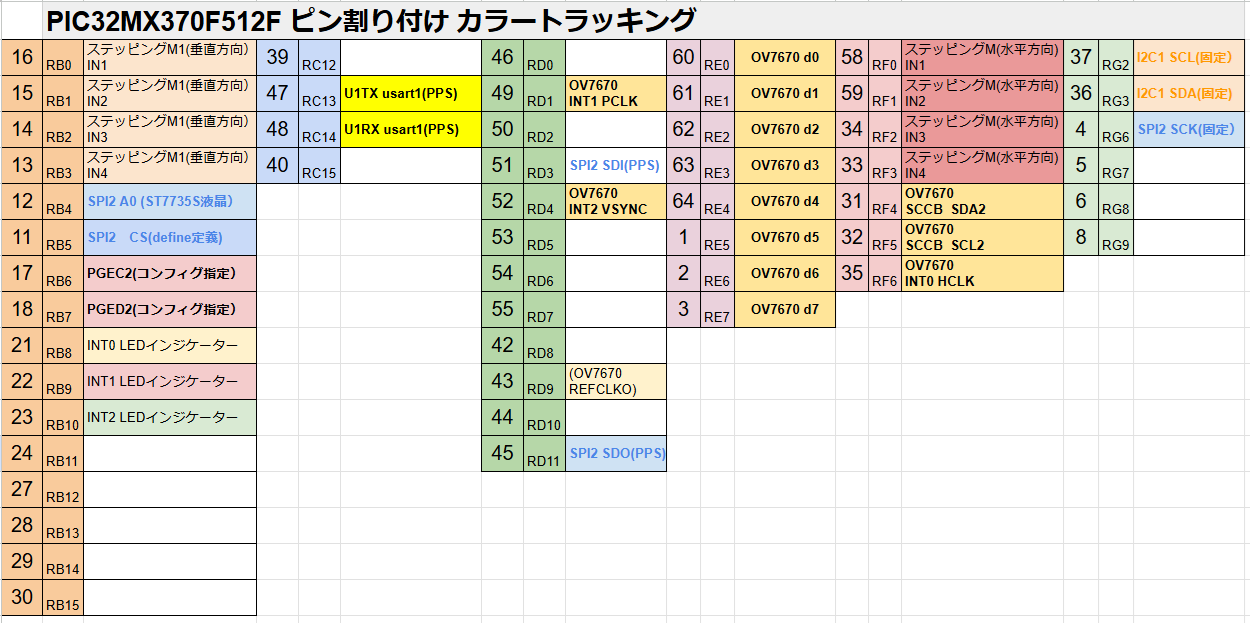
PIC32ピン割り振り表

ダミー行の追加で、トラッキング制御の時間を作る。
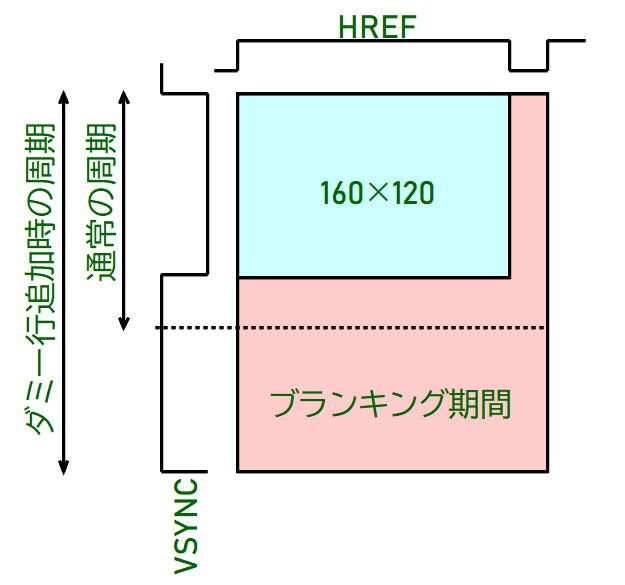
カメラのダミー行設定レジスタ
DM_LNL(0x92):Dummy Row low 8bits
DM_LNH(0x93):Dummy Row high 8bits
DM_LNLに0x30、DM_LNHに0x01を設定し、304行分のダミー行を設定しました。
ブランクエリア設定 SCCBで送信。
//blunk area
I2C2_b2Write(OV7670deviceAdd,0x92, 0x30, true);
I2C2_b2Write(OV7670deviceAdd,0x93, 0x01, true);
※ダミーが少ないと、新しい画面の先頭データ割り込み(VSYNC割込み)が、表示タイミングとかさなり、マイコンにリセットが掛かります。
トラッキングのコード(抜粋)
DMA2とSPIをつかって、QQVGA(160×120)の画面データをRAMから液晶に送信させています。このとき、DMAモジュールを一旦OFFにしています。
そして、VSYNC割込みで、DMAモジュールを再度、ONにしています。この操作で、1画面を転送することができるようになりました。
24.11.14訂正:DCH1CONbits.CHENでON,OFFさせる方法に変えました。
interrupt.c
#include <proc/p32mx370f512h.h>
#include "interrupt.h"
#include "PIC32_Graphics.h"
#include "OV7670Camera.h"
#include "ds_ST7735S.h"
#include "stepping.h"
//Timer1 interrupt
void __ISR(_TIMER_1_VECTOR,IPL1AUTO) ISR_Timer1(void)
{
IFS0bits.T1IF=0;
tm1.cnt++;
if(tm1.cnt%5==0)
{
tm1.fg1=true;
}
if(tm1.cnt==500)
{
tm1.cnt=0;
tm1.fg=true;
IEC0bits.T1IE=0;
//LATBbits.LATB0=~LATBbits.LATB0;
}
}
//USART1 RX interrupt
void __ISR(_UART_1_VECTOR,IPL1AUTO) ISR_UART1(void)
{
if( IFS1bits.U1RXIF==1)
{
IFS1bits.U1RXIF=0;
if(U1STAbits.URXDA)
{
do{
rxU1.ch=U1RXREG;
rxU1.buf[rxU1.length]=rxU1.ch;
rxU1.length++;
if(rxU1.length>=RXUSART_BUFFER_SIZE)
{
rxU1.length=0;
}
}while(U1STAbits.URXDA);
if(rxU1.ch==0x0a && rxU1.length>=3)//0x0a:'\n'
{
//rxUsart.buf[rxUsart.length-2]='\0';//\a\n終端文字FromPC
rxU1.buf[rxU1.length-2]=0x00;//\a\n終端文字FromPC
rxU1.completed=true;
IEC1bits.U1RXIE=0;
}
}
}
}
//VSYNC割込み INT2:RD4
void __ISR(_EXTERNAL_2_VECTOR, IPL7AUTO) ISR_INT2(void)
{
LATBbits.LATB10 = ~LATBbits.LATB10;
IFS0bits.INT2IF=0;
OV7670.LineCounter=0;
OV7670.HpixCounter=0;
//DMACONbits.ON = 1; // DMAモジュールを有効にする
DCH1CONbits.CHEN=1;//DMA1を有効にする。
//IEC2bits.DMA1IE = 1;
//IEC2bits.DMA2IE = 1;
}
//HREF割込み INT0:RF6
void __ISR(_EXTERNAL_0_VECTOR, IPL7AUTO) ISR_INT0(void)
{
IFS0bits.INT0IF=0;
if(INTCONbits.INT0EP==1)
{//立上り割込み処理
LATBbits.LATB8=1;
INTCONbits.INT0EP=0;//立下り待ちにする。
//printf("%d ", OV7670.HpixCounter);
OV7670.HpixCounter=0;
}else
{//立下り割込み処理
INTCONbits.INT0EP=1;//立上り待ちにする。
OV7670.LineCounter++;
if(OV7670.LineCounter==120)
{
OV7670.LineCounter=0;
}
LATBbits.LATB8=0;
}
}
//PCLK割込み INT1:RD1
void __ISR(_EXTERNAL_1_VECTOR, IPL7AUTO) ISR_INT1(void)
{
IFS0bits.INT1IF=0;
LATBbits.LATB9=~LATBbits.LATB9;
//OV7670.portBval = (uint8_t)PORTE;
//sprite1[OV7670.HpixCounter++]=OV7670.portBval;
//sprite1[OV7670.HpixCounter++]=PORTE;
}
//DMA2
//トリガー:Timer2
//from sprite1 to SPI2BUF
//sprite1 size:160*2
//SPI2BUF size:1
void __ISR(_DMA2_VECTOR, IPL7AUTO) ISR_Dma2(void)
{
IFS2bits.DMA2IF = 0; // DMA1割り込みフラグのクリア
if(DCH2INTbits.CHBCIF == 1)
{
SPI2_Stop();
T2CONbits.ON=0;
//LATBbits.LATB1=~LATBbits.LATB1;
DCH2SSA = KVA_TO_PA(&sprite1);
DCH2CONbits.CHEN = 1; // DMA1を有効にする
DCH2INTbits.CHBCIF = 0; // ブロック終了割り込みフラグのクリア
DCH2ECONbits.SIRQEN = 1;
}
}
//DMA1
//トリガー:外部割込み1 INT1
//from PORTE(size 1)
//to sprite1(size160*2)
void __ISR(_DMA1_VECTOR, IPL7AUTO) ISR_Dma1(void)
{
uint8_t mxNum;
IFS2bits.DMA1IF=0;
if(DCH1INTbits.CHDDIF==1)
{
DCH1INTbits.CHDDIF=0;
//DMACONbits.ON = 0; //DMAモジュールをOFFにする。
DCH1CONbits.CHEN=0;//DMA1:disable SYNC割込みで復帰。
mxNum = colorCap();
/*ステッピングモータに指示を出す。水平方向*/
if(existAreaNum!=0 && existAreaNum1!=0)
{
if(existAreaNum==1 || existAreaNum==4 || existAreaNum==7 ||
existAreaNum1==1 || existAreaNum1==4 || existAreaNum1==7)
stLeftMoving(1);
if(existAreaNum==3 || existAreaNum==6 || existAreaNum==9 ||
existAreaNum1==3 || existAreaNum1==6 || existAreaNum1==9)
stRightMoving(1);
}
/*ステッピングモータに指示を出す。垂直方向*/
if(existAreaNum!=0 && existAreaNum1!=0)
{
if(existAreaNum==1 || existAreaNum==2 || existAreaNum==3 ||
existAreaNum1==1 || existAreaNum1==2 || existAreaNum1==3)
st1DownMoving(1);
if(existAreaNum==7 || existAreaNum==8 || existAreaNum==9 ||
existAreaNum1==7 || existAreaNum1==8 || existAreaNum1==9)
st1UpMoving(1);
}
WriteMatrix();//9分割のラインを描画
pushSprite();//RAM上の画面データをDMA2+SPIで送信開始。
DCH1DSA = KVA_TO_PA(&sprite1);
DCH1CONbits.CHEN=1;
//IEC2bits.DMA1IE = 0;
//IEC2bits.DMA2IE = 0;
}
}
識別トラッキング
//トラッキング対象物の左端と右端の座標を取得。
//座標がある画面エリア番号を取得。
uint8_t colorCap(void)
{
int col,row,pix,err;
static uint8_t xmin, xmax, length;
uint8_t color,red,green,blue;
static int row1=20;
bool exit;
static bool exist;
static int no_exist=0;
int counter;
//uint8_t existAreaNum;
char ch;
exist = true;
exit = false;
counter=0;
for(row=row1; row<row1+30; row++)
{
for(pix=10; pix<300; pix++)
{
color = sprite1[(row*320)+pix];
if(pix%2==0)
{
red = color>>3;
green = (color&0x07)<<3;
}else{
blue = color & 0x1F;
if(red>15 && green<10)
//if(red>20 && green>10 && blue<10)
{
col = pix/2;
if(OV7670.cCap.x.min==0)
{
OV7670.cCap.x.min = col;
OV7670.cCap.y.min = row;
OV7670.cCap.x.max = col;
OV7670.cCap.y.max = row;
}else
{
if(col<OV7670.cCap.x.min)
{
OV7670.cCap.x.min = col;
OV7670.cCap.y.min = row;
}
if(col>OV7670.cCap.x.max)
{
OV7670.cCap.x.max=col;
OV7670.cCap.y.max = row;
}
}
/*exist=true;
counter++;
if(counter>5)
{
exit=true;
exist = true;
}*/
}
}
if(exit)
{
exit=false;
break;
}
}
//if(exit)break;
}
if((row==row1+30) && (pix==300))
no_exist++;
if(no_exist>=20)
{
no_exist=0;
existAreaNum=0;
exist=false;
}
row1+=30;
if(row1>=110)
{
row1=20;
}
if(exist && OV7670.cCap.x.min!=0)
{
existAreaNum = getMatrix(OV7670.cCap);
existAreaNum1 = getMatrix1(OV7670.cCap);
#define indication
#ifdef indication
bresenham_circle(OV7670.cCap.x.min, OV7670.cCap.y.min, 6, 0x0f, 0x3F, 0x00);
bresenham_circle(OV7670.cCap.x.min, OV7670.cCap.y.min, 5, 0x0f, 0x3F, 0x00);
if(existAreaNum!=0)
{
ch=0x30+existAreaNum;
ST7735S_Printf1216(numPoint[existAreaNum][0],
numPoint[existAreaNum][1],&ch,1,0x1F,0x3F,0x1F);
}
bresenham_circle(OV7670.cCap.x.max, OV7670.cCap.y.max, 6, 0x0f, 0x00, 0x1F);
bresenham_circle(OV7670.cCap.x.max, OV7670.cCap.y.max, 5, 0x0f, 0x00, 0x1F);
if(existAreaNum1!=0)
{
ch=0x30+existAreaNum1;
ST7735S_Printf1216(numPoint[existAreaNum1][0],
numPoint[existAreaNum1][1],&ch,1,0x1F,0x3F,0x1F);
}
#endif
OV7670.cCap.x.min = 0;
return existAreaNum;
}
OV7670.cCap.x.min = 0;
return 0;
}
//エリア番号取得(左端)
uint8_t getMatrix(_captureData pt)
{
uint8_t returnNum=0;
if(0<pt.y.min && pt.y.min<=40)
{
if( 0<pt.x.min && pt.x.min<=53)
returnNum=1;
if(53<pt.x.min && pt.x.min<=106)
returnNum=2;
if(106<pt.x.min && pt.x.min<=159)
returnNum=3;
}
if(40<pt.y.min && pt.y.min<=80)
{
if( 0<pt.x.min && pt.x.min<=53)
returnNum=4;
if(53<pt.x.min && pt.x.min<=106)
returnNum=5;
if(106<pt.x.min && pt.x.min<=159)
returnNum=6;
}
if(80<pt.y.min && pt.y.min<=119)
{
if( 0<pt.x.min && pt.x.min<=53)
returnNum=7;
if(53<pt.x.min && pt.x.min<=106)
returnNum=8;
if(106<pt.x.min && pt.x.min<=159)
returnNum=9;
}
return returnNum;
}
//画面エリア番号取得(右端)
uint8_t getMatrix1(_captureData pt)
{
uint8_t returnNum=0;
if(0<pt.y.max && pt.y.max<=40)
{
if( 0<pt.x.max && pt.x.max<=53)
returnNum=1;
if(53<pt.x.max && pt.x.max<=106)
returnNum=2;
if(106<pt.x.max && pt.x.max<=159)
returnNum=3;
}
if(40<pt.y.max && pt.y.max<=80)
{
if( 0<pt.x.max && pt.x.max<=53)
returnNum=4;
if(53<pt.x.max && pt.x.max<=106)
returnNum=5;
if(106<pt.x.max && pt.x.max<=159)
returnNum=6;
}
if(80<pt.y.max && pt.y.max<=119)
{
if( 0<pt.x.max && pt.x.max<=53)
returnNum=7;
if(53<pt.x.max && pt.x.max<=106)
returnNum=8;
if(106<pt.x.max && pt.x.max<=159)
returnNum=9;
}
return returnNum;
}