PIC32MX I2Cドライバー
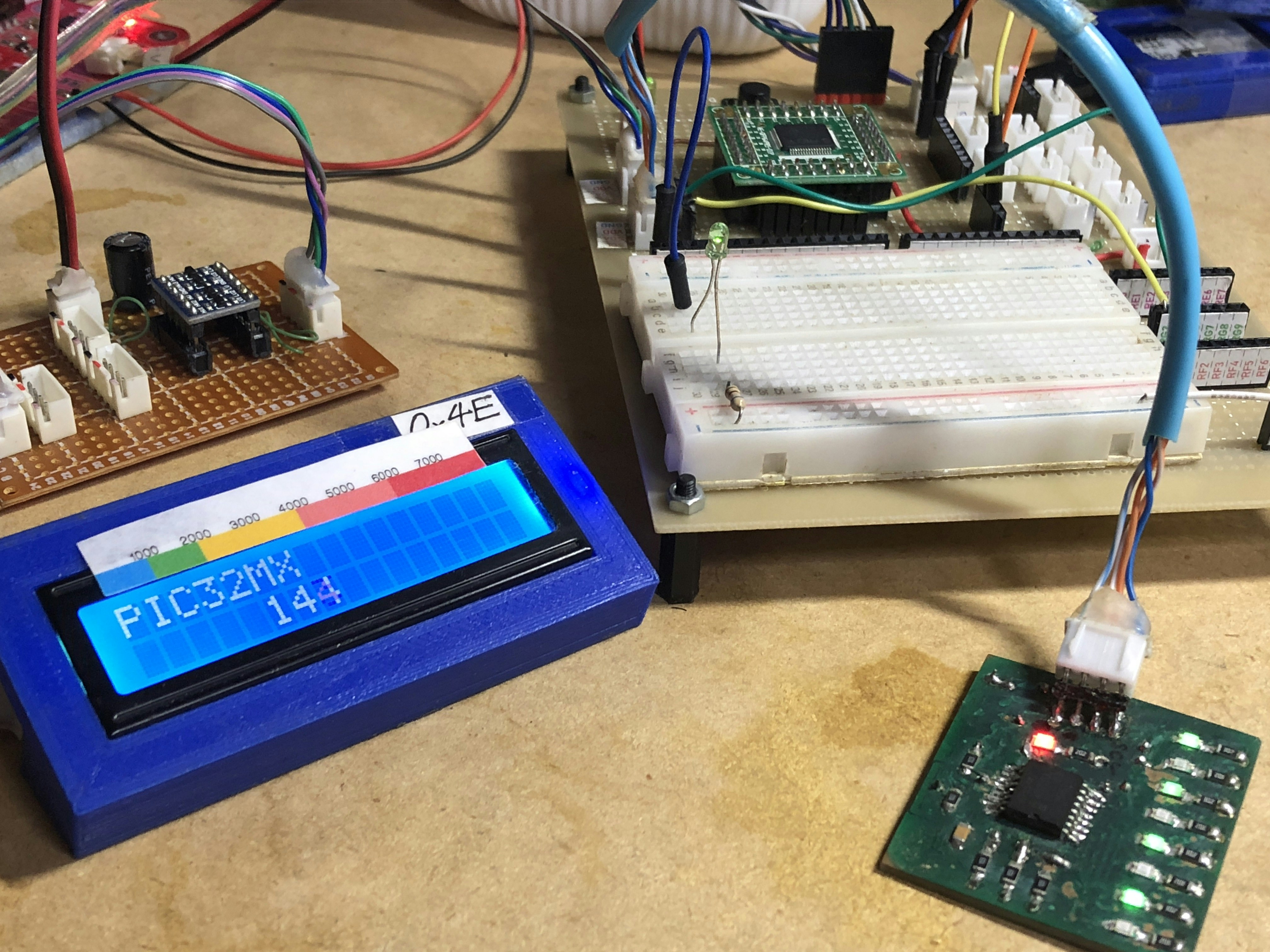

左:2行16文字LCD:PCF8574 IOエキスパンダーで制御(5v駆動)
3.3Vから5Vにレベル変換して通信。
右:PCF8574 IOエキスパンダー基板
この2つのI2Cデバイスを動かしました。
PIC32 I2C1ドライバー
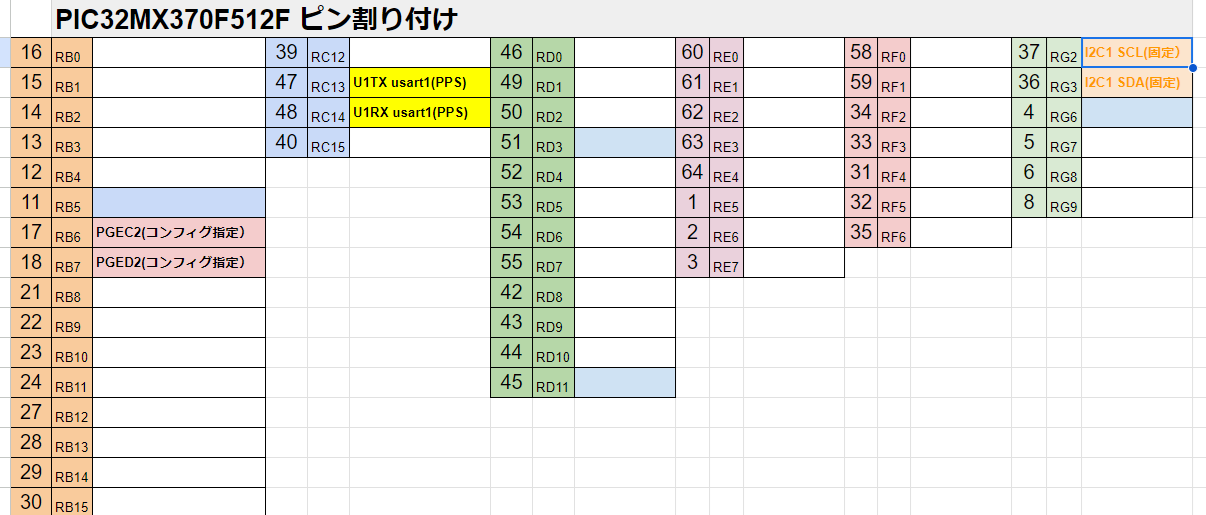
PIC32 28pinで動いたものを、64pinに移植。
変更点は、クロック線とデータ線のピン位置のみ。で、動いた。
クロックスピードを初期化時は、100khzに設定。LCDの初期化終了時に、600khzにする。LCDの初期化時、400khz以上にすると、LCDが初期化されないため。
I2Cのレジスタ操作は、dsPICで制作したものを移植。2年以上まえなので、詳細は忘れたが、動き自体は、大差なかったはず。レジスタ名の変更で行けたはず。
PIC32_I2C1.h
#ifndef PIC32_I2C1_H
#define PIC32_I2C1_H
#ifdef __cplusplus
extern "C" {
#endif
#include <xc.h>
#include <cp0defs.h>
#include <sys/attribs.h>
#include <stdio.h>
#include <stdbool.h>
//デバイスアドレス
#define MCP4726DeviceAdd 0xC0
#define I2C1_Ack 0//SSP1CON2.ACKDT master:receive mode
#define I2C1_NoAck 1//SSP1CON2.ACKDT master:receive mode
#define I2C1_SCL_PIN PORTGbits.RG2
#define I2C1_SDA_PIN PORTGbits.RG3
extern void I2C1_Init(void);
extern void I2C1_Reset(void);
extern bool I2C1_CheckIdle(void);
extern bool I2C1_ClearIF(void);
extern bool I2C1_Start(void);
extern bool I2C1_ReStart(void);
extern bool I2C1_Stop(void);
extern bool I2C1_Tx_Buffer_Write(uint8_t _data);
extern uint8_t I2C1_Rx_Buffer_Read(void);
extern bool I2C1_Wait_Ack(void);
extern bool I2C1_Send_Ack(uint8_t _Ack_Nack);
typedef struct{
unsigned int cnt;
bool fg;
}_I2CError;
extern _I2CError I2C1Error;
extern uint8_t I2C1_DataBuffer[10];
//------------------------------------------------------------------------
extern uint8_t I2C1_b1Write(uint8_t _device_add, uint8_t _data);
extern uint8_t I2C1_b2Write(uint8_t _device_add, uint8_t _data1, uint8_t _data2);
extern bool I2C1_bnWrite(uint8_t _device_add, uint8_t *_data, uint8_t _len);
extern bool I2C1_bnWrite1(uint8_t _device_add, uint8_t _add, uint8_t *_data, uint8_t _len);
extern bool I2C1_bnWriteSV(uint8_t _device_add, uint8_t _add, uint8_t _val, uint8_t _len);
extern uint8_t I2C1_b1Read(uint8_t _device_add, uint8_t _data1);
extern bool I2C1_bnRead(uint8_t _device_add, uint8_t _data1,uint8_t _len);
#ifdef __cplusplus
}
#endif
#endif /* PIC32_I2C1 */
PIC32_I2C1.c
//
//220812 b1Read最後のNack修正。
#include "PIC32_I2C1driver.h"
#include "peripheral.h"
_I2CError I2C1Error;
uint8_t I2C1_DataBuffer[10];
void I2C1_Init(void)
{
unsigned int i;
I2C1CON=0x0000;
//I2C1BRG=0x002F;//400kHz Fp=40Mhz
I2C1BRG=0x0189;//100khz Fp=80Mhz
I2C1CONbits.DISSLW=1;//errata
I2C1CONbits.STREN=1;
I2C1CONbits.ON=1;
IFS1bits.I2C1MIF=0;
IEC1bits.I2C1MIE=0;
IFS1bits.I2C1SIF=0;
IEC1bits.I2C1SIE=0;
}
void I2C1_Reset(void)
{
unsigned int buf;
I2C1CONbits.I2CEN=0;
buf=TRISB;
buf|=0x0000;
I2C1_SCL_PIN=0;
__delay_us(10);
I2C1_SCL_PIN=1;
__delay_us(10);
I2C1_SCL_PIN=0;
__delay_us(10);
I2C1_SCL_PIN=1;
__delay_us(10);
}
bool I2C1_CheckIdle(void)
{
signed int i;
unsigned int buf;
for(i=0x7FFF; i; i--)
{
buf=I2C1CON;
//buf&=0x44DB;
buf&=0x003F;
if(!buf)
return true;
}
return false;
}
bool I2C1_ClearIF(void)
{
signed int i;
for(i=0x3FFF; i; i--)
{
if(IFS1bits.I2C1MIF)
{
IFS1bits.I2C1MIF=0;
return true;
}
}
return false;
}
bool I2C1_Start(void)
{
signed int i;
for(i=0x3FFF; i; i--)
{
if(I2C1_CheckIdle())
{
I2C1CONbits.SEN=1;
if(I2C1_ClearIF());
return true;
}
}
return false;
}
bool I2C1_ReStart(void)
{
//restart
signed int i;
for(i=0x3FFF; i; i--)
{
if(I2C1_CheckIdle())
{
I2C1CONbits.RSEN=1;
return true;
}
}
return false;
}
bool I2C1_Stop(void)
{
signed int i;
for(i=0x3FFF; i; i--)
{
if(I2C1_CheckIdle())
{
I2C1CONbits.PEN=1;
while(I2C1CONbits.PEN);
if(I2C1_ClearIF())
return true;
}
}
return false;
}
//I2C1 transmit register write
//TBS: 0:empty 1:I2C1TRN full
bool I2C1_Tx_Buffer_Write(uint8_t _data)
{
signed int i,j;
if(!I2C1_CheckIdle())return false;
I2C1TRN=_data;
for(i=0x7FFF; i; i--)
{
if(!I2C1STATbits.TBF)
{
while(I2C1STATbits.TRSTAT)
{
j++;
if(j>0x7FFF)return false;
};
return true;
}
}
return false;
}
uint8_t I2C1_Rx_Buffer_Read(void)
{
uint8_t ret,cnt;
ret=0xFF;
cnt=0;
if(!I2C1_CheckIdle())return false;
I2C1CONbits.RCEN=1;
while(!I2C1STATbits.RBF){
__delay_us(3);
cnt++;
if(cnt==200)return false;
};
//if(!I2C1_CheckIdle())return false;
ret = I2C1RCV;
return ret;
}
//ACKSTAT 0:ACK 1:NACK
bool I2C1_Wait_Ack(void)
{
signed int i;
for(i=0x7FFF; i; i--)
{
if(!I2C1STATbits.ACKSTAT)
return true;
}
return false;
}
bool I2C1_Send_Ack(uint8_t _Ack_Nack)
{
if(!I2C1_CheckIdle())return false;
I2C1CONbits.ACKDT=_Ack_Nack;
I2C1CONbits.ACKEN=1;
while(I2C1CONbits.ACKEN);
I2C1CONbits.ACKDT=0;//220812追記
if(!I2C1_ClearIF()) return false;
return true;
}
//------------------------------------------------------------------------
uint8_t I2C1_b1Write(uint8_t _device_add, uint8_t _data)
{
//start condition
I2C1_Start();
//send device address
I2C1_Tx_Buffer_Write(_device_add);
if(!I2C1_Wait_Ack())
return 0xE1;
if(!I2C1_ClearIF())
return 0xE2;
//send data
I2C1_Tx_Buffer_Write(_data);
if(!I2C1_Wait_Ack())
return 0xE3;
if(!I2C1_ClearIF())
return 0xE4;
//Stop condition
I2C1_Stop();
return true;
}
bool I2C1_bnWrite(uint8_t _device_add, uint8_t *_data, uint8_t _len)
{
uint8_t buf;
//start condition
I2C1_Start();
//send device address
I2C1_Tx_Buffer_Write(_device_add);
if(!I2C1_Wait_Ack())
return false;
if(!I2C1_ClearIF())
return false;
//send data
do{
buf=*_data;
I2C1_Tx_Buffer_Write(buf);
if(!I2C1_Wait_Ack())
return false;
if(!I2C1_ClearIF())
return false;
_data++;
_len--;
}while(_len!=0);
//Stop condition
I2C1_Stop();
return true;
}
uint8_t I2C1_b2Write(uint8_t _device_add, uint8_t _data1, uint8_t _data2)
{
//start condition
I2C1_Start();
//send device address-----------------
I2C1_Tx_Buffer_Write(_device_add);
if(!I2C1_Wait_Ack())
{
return 0x41;
}
if(!I2C1_ClearIF())
{
return 0x42;
}
//send data1------------------------
I2C1_Tx_Buffer_Write(_data1);
if(!I2C1_Wait_Ack())
{
return 0x43;
//return false;
}
if(!I2C1_ClearIF())
return 0x44;
//send data
//send data2------------------------
I2C1_Tx_Buffer_Write(_data2);
if(!I2C1_Wait_Ack())
{
return 0x45;
}
if(!I2C1_ClearIF())
{
return 0x46;
}
//Stop condition
I2C1_Stop();
return true;
}
bool I2C1_bnWrite1(uint8_t _device_add, uint8_t _add, uint8_t *_data, uint8_t _len)
{
uint8_t buf;
//start condition
I2C1_Start();
//send device address
I2C1_Tx_Buffer_Write(_device_add);
if(!I2C1_Wait_Ack())
return false;
if(!I2C1_ClearIF())
return false;
I2C1_Tx_Buffer_Write(_add);
if(!I2C1_Wait_Ack())
return false;
if(!I2C1_ClearIF())
return false;
//send data
do{
buf=*_data;
I2C1_Tx_Buffer_Write(buf);
if(!I2C1_Wait_Ack())
return false;
if(!I2C1_ClearIF())
return false;
_data++;
_len--;
}while(_len!=0);
//Stop condition
I2C1_Stop();
return true;
}
bool I2C1_bnWriteSV(uint8_t _device_add, uint8_t _add, uint8_t _val, uint8_t _len)
{
uint8_t buf;
//start condition
I2C1_Start();
//send device address
I2C1_Tx_Buffer_Write(_device_add);
if(!I2C1_Wait_Ack())
return false;
if(!I2C1_ClearIF())
return false;
I2C1_Tx_Buffer_Write(_add);
if(!I2C1_Wait_Ack())
return false;
if(!I2C1_ClearIF())
return false;
//send data
do{
I2C1_Tx_Buffer_Write(_val);
if(!I2C1_Wait_Ack())
return false;
if(!I2C1_ClearIF())
return false;
_len--;
}while(_len!=0);
//Stop condition
I2C1_Stop();
return true;
}
uint8_t I2C1_b1Read(uint8_t _device_add, uint8_t _data1)
{
uint8_t ret;
//Start Condition
I2C1_Start();
//send device address
ret=I2C1_Tx_Buffer_Write(_device_add);
if(!I2C1_Wait_Ack())
{
return 0xA0;
}
if(!I2C1_ClearIF())
{
return 0xA1;
}
//send data
I2C1_Tx_Buffer_Write(_data1);
if(!I2C1_Wait_Ack())
{
return 0xA2;
}
if(!I2C1_ClearIF())
{
return 0xA3;
}
//restart
I2C1_ReStart();
if(!I2C1_ClearIF())
{
return 0xA4;
}
//send device address
I2C1_Tx_Buffer_Write(_device_add|0x01);
if(!I2C1_Wait_Ack())
{
return 0xA5;
}
if(!I2C1_ClearIF())
{
return 0xA6;
}
//recieve data
ret=I2C1_Rx_Buffer_Read();
if(!I2C1_ClearIF())
{
return 0xA7;
}
//send Nack
I2C1_Send_Ack(I2C1_NoAck);
/* if(!I2C1_ClearIF())
{
return 0xA2;
}*/
//Stop Condition
I2C1_Stop();
/* if(!I2C1_ClearIF())
{
return 0xA3;
}*/
return ret;
}
bool I2C1_bnRead(uint8_t _device_add, uint8_t _data1,uint8_t _len)
{
uint8_t index=0;
//Start Condition
I2C1_Start();
//send device address
I2C1_Tx_Buffer_Write(_device_add);
if(!I2C1_Wait_Ack())
{
return 0xA0;
}
if(!I2C1_ClearIF())
{
return 0xA1;
}
//send data
I2C1_Tx_Buffer_Write(_data1);
if(!I2C1_Wait_Ack())
{
return 0xA2;
}
if(!I2C1_ClearIF())
{
return 0xA3;
}
//restart
I2C1_ReStart();
if(!I2C1_ClearIF())
{
return 0xA4;
}
//send device address
I2C1_Tx_Buffer_Write(_device_add|0x01);
if(!I2C1_Wait_Ack())
{
return 0xA5;
}
if(!I2C1_ClearIF())
{
return 0xA6;
}
//recieve data
do{
I2C1_DataBuffer[index++]=I2C1_Rx_Buffer_Read();
if(!I2C1_ClearIF())
{
return 0xA7;
}
if(_len!=1)
{
I2C1_Send_Ack(I2C1_Ack);
}
_len--;
}while(_len!=0);
//send Nack
I2C1_Send_Ack(I2C1_NoAck);
I2C1_Stop();
return true;
}
LCDドライバー
I2C_LCD.h
#ifndef I2C_LCD_H
#define I2C_LCD_H
#ifdef __cplusplus
extern "C" {
#endif
#include <xc.h>
#include <cp0defs.h>
#include <sys/attribs.h>
#include <stdio.h>
#include <stdbool.h>
#include "PIC32_I2C1driver.h"
#include "peripheral.h"
#define CM 0 //Command Mode
#define DM 1 //Data Mode
#define WM 0 //出力WriteMode
#define RM 1 //入力ReadMode
#define High 1
#define Low 0
#define LED_ON 1
#define LED_OFF 0
#define LcdDeviceAdd 0x4E//FC-113(RCF8574 address)
#define LcdDeviceAdd_AT 0x7E//RCF8574AT address
#define LcdDDRAMAdd_firstline 0x80
#define LcdDDRAMAdd_secondline 0xC0
#define LcdDDRAMAdd_thirdline 0x94
#define LcdDDRAMAdd_forthline 0xD4
#define LcdCmd_Clear_all 0x01
extern uint8_t LCD_BackLight_EN[2];
typedef union {
uint8_t byt;
struct{
uint8_t RS:1;//LSB
uint8_t RW:1;
uint8_t EN:1;
uint8_t LED:1;
uint8_t D4:1;
uint8_t D5:1;
uint8_t D6:1;
uint8_t D7:1;//MSB
};
}_OD;
extern _OD OD;
extern char LCDTxt[16];
extern void LCD_send(uint8_t _device_add,uint8_t _data, uint8_t _mode);
extern void LCD_WriteData(uint8_t _device_add,uint8_t data);
extern void LCD_Command(uint8_t _device_add,uint8_t cmd);
extern void LCD_Init(uint8_t _device_add);
extern void LCD_Printf(uint8_t _device_add, uint8_t *string, uint8_t _length, uint8_t _DDRAM_Add);
#ifdef __cplusplus
}
#endif
#endif /* I2C_LCD_H */
I2C_LCD.c
#include "I2C_LCD.h"
uint8_t LCD_BackLight_EN[2];
_OD OD;
char LCDTxt[16];
//-----------------------------------------//
//LCD_send
//_device_add
//data: Upper 4bits data
//_mode: CM 0 :Command Mode
// DM 1 :Data Mode
//_led on/off
//-----------------------------------------//
void LCD_send(uint8_t _device_add,uint8_t _data, uint8_t _mode)
{
OD.byt=0x00;
if(_device_add==LcdDeviceAdd_AT)
OD.LED=LCD_BackLight_EN[0];
else
OD.LED=LCD_BackLight_EN[1];
OD.byt = OD.byt|(_data& 0xF0);
I2C1_b1Write(_device_add,OD.byt);
__delay_us(300);
OD.RS=_mode;
I2C1_b1Write(_device_add,OD.byt);
__delay_us(300);
OD.EN=High;
I2C1_b1Write(_device_add,OD.byt);
__delay_us(300);
OD.EN=Low;
I2C1_b1Write(_device_add,OD.byt);
__delay_us(300);
}
void LCD_WriteData(uint8_t _device_add,uint8_t _data)
{
LCD_send(_device_add, _data,DM);
LCD_send(_device_add, _data<<4,DM);
__delay_us(40);
}
void LCD_Command(uint8_t _device_add,uint8_t cmd)
{
LCD_send(_device_add,cmd,CM);
LCD_send(_device_add,cmd<<4,CM);
__delay_us(40);
}
void LCD_Init(uint8_t _device_add)
{
__delay_ms(15);
LCD_send(_device_add,0x30,CM);//8bits mode
__delay_ms(5);
LCD_send(_device_add,0x30,CM);//8bits mode
__delay_us(500);
LCD_send(_device_add,0x30,CM);//8bits mode three times setting
LCD_send(_device_add,0x20,CM);//4bits mode
LCD_Command(_device_add,0x28);//Function setting.
LCD_Command(_device_add,0x08);//display off
LCD_Command(_device_add,0x01);//display clear
LCD_Command(_device_add,0x06);//entry
LCD_Command(_device_add,0x02);//cursor home
LCD_Command(_device_add,0x0C);//display on
LCD_BackLight_EN[0]=LED_ON;
LCD_BackLight_EN[1]=LED_ON;
}
//
//
void LCD_Printf(uint8_t _device_add, uint8_t *string, uint8_t _length, uint8_t _DDRAM_Add)
{
LCD_Command(_device_add,_DDRAM_Add);
do{
LCD_WriteData(_device_add, *string);
string++;
}while(--_length);
}
main.c
main.c
// PIC32MX370F512H Configuration Bit Settings
// 'C' source line config statements
// DEVCFG3
#pragma config USERID = 0xFFFF // Enter Hexadecimal value (Enter Hexadecimal value)
#pragma config FSRSSEL = PRIORITY_7 // Shadow Register Set Priority Select (SRS Priority 7)
#pragma config PMDL1WAY = OFF // Peripheral Module Disable Configuration (Allow multiple reconfigurations)
#pragma config IOL1WAY = OFF // Peripheral Pin Select Configuration (Allow multiple reconfigurations)
// DEVCFG2
#pragma config FPLLIDIV = DIV_2 // PLL Input Divider (2x Divider)
#pragma config FPLLMUL = MUL_20 // PLL Multiplier (20x Multiplier)
#pragma config FPLLODIV = DIV_2 // System PLL Output Clock Divider (PLL Divide by 1)
// DEVCFG1
#pragma config FNOSC = FRCPLL // Oscillator Selection Bits (Fast RC Osc with PLL)
#pragma config FSOSCEN = OFF // Secondary Oscillator Enable (Disabled)
#pragma config IESO = OFF // Internal/External Switch Over (Disabled)
#pragma config POSCMOD = OFF // Primary Oscillator Configuration (Primary osc disabled)
#pragma config OSCIOFNC = OFF // CLKO Output Signal Active on the OSCO Pin (Disabled)
#pragma config FPBDIV = DIV_1 // Peripheral Clock Divisor (Pb_Clk is Sys_Clk/1)
#pragma config FCKSM = CSECMD // Clock Switching and Monitor Selection (Clock Switch Enable, FSCM Disabled)
#pragma config WDTPS = PS1048576 // Watchdog Timer Postscaler (1:1048576)
#pragma config WINDIS = OFF // Watchdog Timer Window Enable (Watchdog Timer is in Non-Window Mode)
#pragma config FWDTEN = OFF // Watchdog Timer Enable (WDT Disabled (SWDTEN Bit Controls))
#pragma config FWDTWINSZ = WINSZ_25 // Watchdog Timer Window Size (Window Size is 25%)
// DEVCFG0
#pragma config DEBUG = OFF // Background Debugger Enable (Debugger is Disabled)
#pragma config JTAGEN = OFF // JTAG Enable (JTAG Disabled)
#pragma config ICESEL = ICS_PGx2 // ICE/ICD Comm Channel Select (Communicate on PGEC2/PGED2)
#pragma config PWP = OFF // Program Flash Write Protect (Disable)
#pragma config BWP = OFF // Boot Flash Write Protect bit (Protection Disabled)
#pragma config CP = OFF // Code Protect (Protection Disabled)
// #pragma config statements should precede project file includes.
// Use project enums instead of #define for ON and OFF.
#include <xc.h>
#include <stdio.h>
#include <cp0defs.h>
#include <sys/attribs.h>
#include "peripheral.h"
#include "PIC32_I2C1driver.h"
#include "I2C_LCD.h"
void portInit(void)
{
TRISB=0x0000;
TRISC=0x0000;
TRISD=0x0000;
TRISE=0x0000;
TRISF=0x0000;
TRISG=0x0000;
ANSELB=0x0000;
ANSELC=0x0000;
ANSELD=0x0000;
ANSELE=0x0000;
ANSELF=0x0000;
ANSELG=0x0000;
PORTB=0x0000;
PORTC=0x0000;
PORTD=0x0000;
PORTE=0x0000;
PORTF=0x0000;
PORTG=0x0000;
}
void main(void)
{
uint8_t val,length;
uint8_t txt[10];
unsigned int counter=0x0000;
uint32_t address;
unsigned int tmp_CP0_Status; // Temporary register for CP0 reg storing
//oscillator init---------------------------------
SYSKEY = 0x0; // ensure OSCCON is locked
SYSKEY = 0xAA996655; // Write Key1 to SYSKEY
SYSKEY = 0x556699AA; // Write Key2 to SYSKEY
//PLL Output Divisor bits
OSCCONbits.PLLODIV=0b000; //000 = PLL output divided by 1
//PeripheralBusClock diviser.
OSCCONbits.PBDIV=0b00; //SYSCLK divided by1
SYSKEY = 0x0; // ensure OSCCON is locked
//port init---------------------------------------
portInit();
//peripheral initializing-------------------------
timer1Init();
I2C1_Init();
LCD_Init(LcdDeviceAdd);
I2C1BRG=0x003D;//600khz Fp=80Mhz
LCD_Printf(LcdDeviceAdd,"PIC32MX",7,0x80);
usartInit();
__delay_ms(10);//これを入れないとazが出力されない。
putchar('a');putchar('z');
//interrupt initializing-------------------------
printf("\nPIC32MX370F512HT\n");
//割り込み関連
address=_CP0_GET_EBASE();//例外ベクタアドレス
printf("EBASE=%lx\n",address);
INTCONbits.MVEC=1;
tmp_CP0_Status=_CP0_GET_STATUS();
tmp_CP0_Status|=0x00000001;//CP0.STATUS.IE=1で割り込み許可
_CP0_SET_STATUS(tmp_CP0_Status);
// __builtin_enable_interrupts();
while(1)
{
if(U1rx.completed)
{
U1rx.completed=false;
printf("%s\r",U1rx.buf);
U1rx.length=0;
IEC1bits.U1RXIE=1;
}
if(tm1.fg)
{
tm1.fg=false;
LATBbits.LATB0=~LATBbits.LATB0;
I2C1_b1Write(0x4A,val);
if(val==0x55)
val=0xAA;
else
val=0x55;
length=sprintf(txt,"%8ld",counter++);
LCD_Printf(LcdDeviceAdd,txt,length,0xC0);
IEC0bits.T1IE=1;
}
}
return;
}