__前回の記事__の続編です。
全体の構成
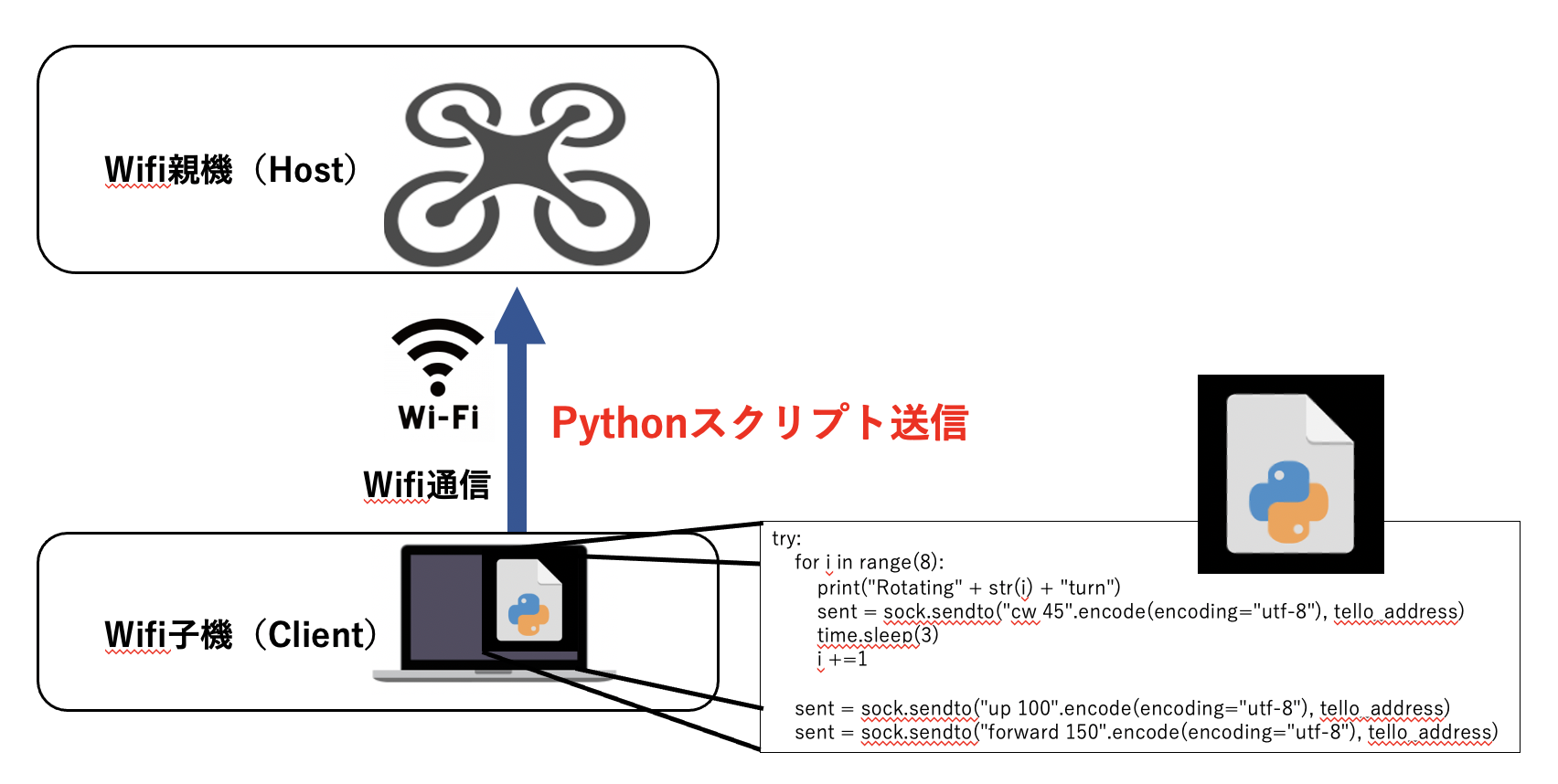
前回は、MacbookのTerminalに、人間が手入力で"takeoff", "forward 100", ・・・, "land"と、Tello APIで提供されているコマンドをひとつひとつ入力していました。
MacbookからWifi通信でTelloに命令を送れるようになったものの、これだと、同じくWifi通信で、iPhone/ iPadの画面に表示されたバーチャル・ジョイスティックで操作した方が、操作しやすいです。
そこで今回は、一連の飛行動作を、あらかじめスクリプトに記述(列挙)して、人間は手放しでTelloが飛ぶさまを眺めていられるように、Pythonスクリプトを書き換えてみました。
プログラムの中では、__for文__で、繰り返し処理を行うようにしました。(時計回り45度回転を8回繰り返す)。
今後、__if文__と、__一般物体認識(OpenCVの機能)__を組み合わせて、次のようなことにも挑戦してみたいと思います。
- Telloに内蔵されているカメラに、"椅子"が写ったら、そこに着地("land")させる。
- Tello内蔵カメラに、人が写ったら、衝突するリスクを減らすために、300上昇する("up 300")
今回、取り組む内容を次に述べます。
試験飛行を行った結果、意図した通りに動作することを確認しています。
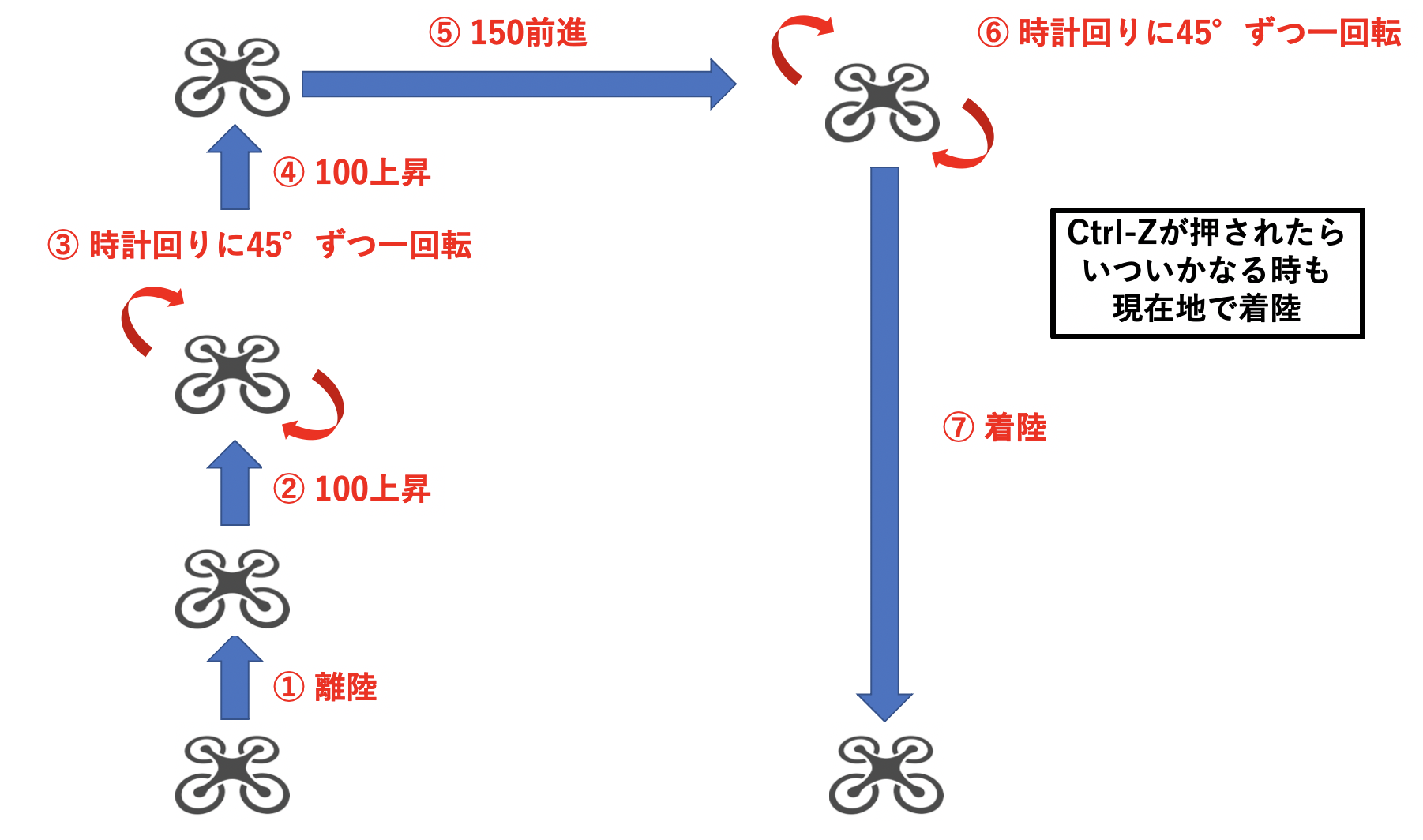
プログラムした自動飛行経路
実行したスクリプト
# Tello Python3
import threading
import socket
import sys
import time
host = ''
port = 9000
locaddr = (host,port)
# Create a UDP socket
sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
tello_address = ('192.168.10.1', 8889)
sock.bind(locaddr)
def recv():
count = 0
while True:
try:
data, server = sock.recvfrom(1518)
except Exception:
print ('\nExit . . .\n')
break
def takeoff():
sent = sock.sendto("takeoff".encode(encoding="utf-8"), tello_address)
def land():
sent = sock.sendto("land".encode(encoding="utf-8"), tello_address)
def forward(n):
order = "forwarding " + str(int(n))
sent = sock.sendto(order.encode(encoding="utf-8"), tello_address)
def up(n):
order = "up " + str(int(n))
sent = sock.sendto(order.encode(encoding="utf-8"), tello_address)
def clockwise_45degree_8times_repeating():
i = 0
for i in range(8):
if i == 0:
print("Clockwise 45degree Rotating 1st turn")
elif i == 1:
print("Clockwise 45degree Rotating 2nd turn")
else:
print("Clockwise 45degree Rotating " + str(i+1) + "-th turn")
sent = sock.sendto("cw 45".encode(encoding="utf-8"), tello_address)
time.sleep(3)
i +=1
# recvThread create
recvThread = threading.Thread(target=recv)
recvThread.start()
print("start")
sent = sock.sendto("command".encode(encoding="utf-8"), tello_address)
time.sleep(8)
try:
print("Taking off")
takeoff()
time.sleep(3)
up(100)
time.sleep(3)
clockwise_45degree_8times_repeating()
print("Ascending 100cm")
up(100)
time.sleep(3)
print("forwarding 150cm")
forward(150)
time.sleep(3)
clockwise_45degree_8times_repeating()
print("Landing down")
land()
time.sleep(3)
sock.close()
except KeyboardInterrupt:
print("forced shutdown button pressed. Landing down.")
land()
time.sleep(8)
sock.close()
実行結果(1)
スクリプトに記述した動作が、最初から最後まで全部実行できた。
(1) Rotating 1st turn〜Rotating 8-th turn: 時計回り45度の回転を8回繰り返し、360度回転
(2) 100cm上昇後
(3) 150cm前進
(4) Rotating 1st turn〜Rotating 8-th turn: 時計回り45度の回転を8回繰り返し、360度回転
electron@diynoMacBook-Pro Tello % python3 TelloScript.py
start
Taking off
Clockwise 45degree Rotating 1st turn
Clockwise 45degree Rotating 2nd turn
Clockwise 45degree Rotating 3-th turn
Clockwise 45degree Rotating 4-th turn
Clockwise 45degree Rotating 5-th turn
Clockwise 45degree Rotating 6-th turn
Clockwise 45degree Rotating 7-th turn
Clockwise 45degree Rotating 8-th turn
Ascending 100cm
forwarding 150cm
Clockwise 45degree Rotating 1st turn
Clockwise 45degree Rotating 2nd turn
Clockwise 45degree Rotating 3-th turn
Clockwise 45degree Rotating 4-th turn
Clockwise 45degree Rotating 5-th turn
Clockwise 45degree Rotating 6-th turn
Clockwise 45degree Rotating 7-th turn
Clockwise 45degree Rotating 8-th turn
Landing down
Exit . . .
electron@diynoMacBook-Pro Tello %
実行結果(2)
スクリプト実行により、Telloが離陸した後に、Macbookキーボード側でCtrl-Z(強制終了)を叩いた。スクリプトに記述した通り、Telloは数秒後に、自動着陸した。
electron@diynoMacBook-Pro Tello % python3 TelloScript.py
start
Taking off
Clockwise 45degree Rotating 1st turn
Clockwise 45degree Rotating 2nd turn
Clockwise 45degree Rotating 3-th turn
Clockwise 45degree Rotating 4-th turn
^Z
zsh: suspended python3 TelloScript.py
electron@diynoMacBook-Pro Tello %