はじめに
本記事はesys Advent Calendar 2021 4日目の記事となります.
こんにちは!esys19の@eg117117です.
この記事では最近個人的に手に入れた3d lidarで大学の3次元地図を作ってみよう!というものになります.
環境
・ ubuntu20.04
・ ros melodicのDocker環境
センサーの用意
まず一般の誤家庭にあるHDL32-Eを用意します.(これが言いたいだけ)
HDL32-Eは縦に32本のレーザを360°に照査する3d lidarになります.
私は運よく海外オークションサイトのebayで中古の物を100k程度で手に入れましたが,
定価は600万ほどするらしいです.()
※12/3にebayを確認した感じ,わりと10万台のvelodyneが結構ごろごろしているようです.みんなも買おう!()
こちら100kで手に入れたvelodyneです pic.twitter.com/Lyyl54Gp0m
— EG (@eg117117) November 6, 2021
ebay velodyne チャレンジ、完全勝利した pic.twitter.com/qwcN8TBSb6
— EG (@eg117117) November 7, 2021
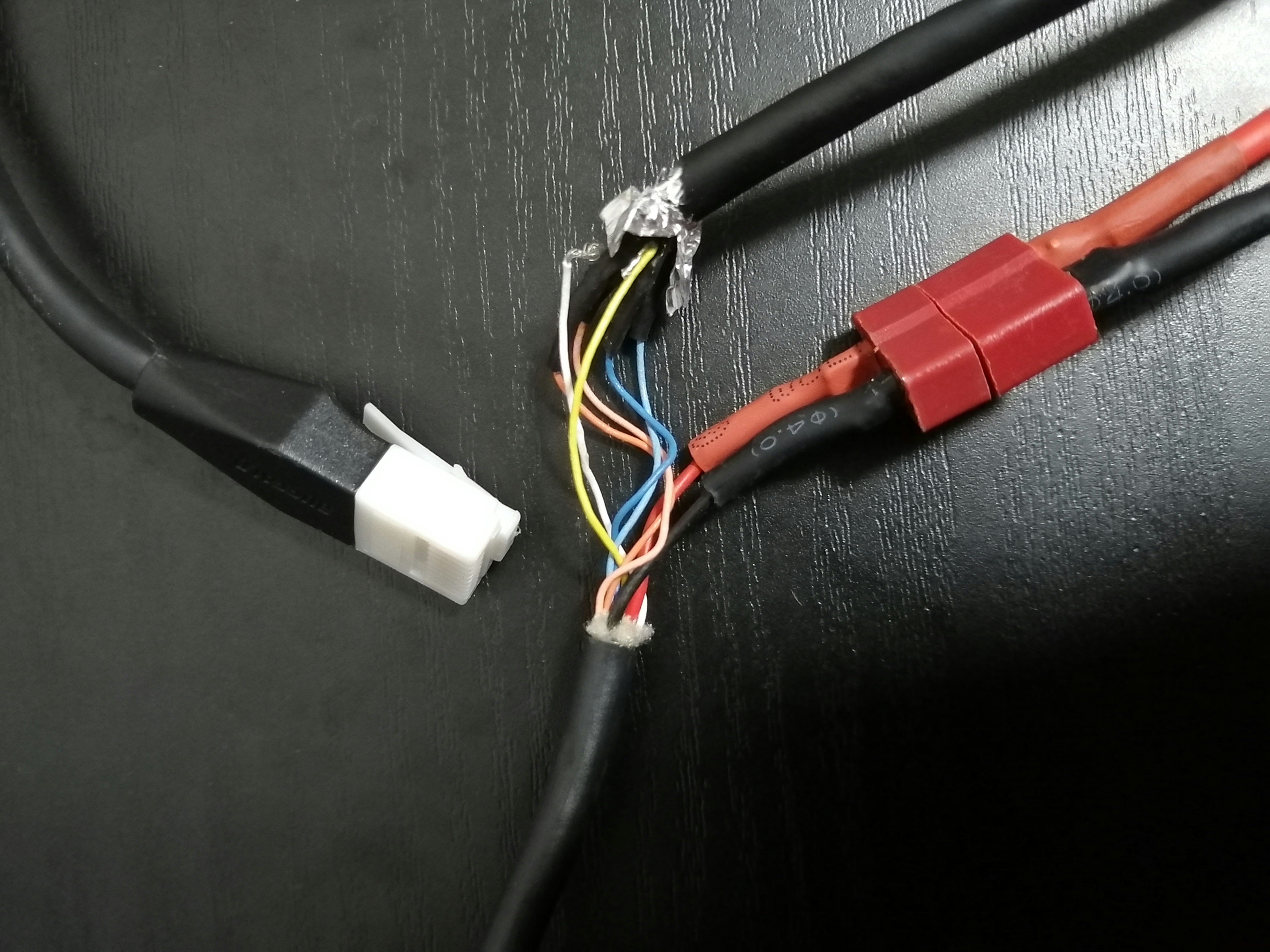
ebayで出品されているHDL32-Eは大体もともとのケーブルがちょん切られているのでこちらのdatasheetをもとに配線を行いました.
https://pdf.directindustry.com/pdf/velodynelidar/hdl-32e-datasheet/182407-676098.html
こんな感じで↓
(これはすごく横着した結果なので通常はvelodyneのjunktion boxを買うか自作したほうがいいです)
データの可視化
velodyneのpackageを入れたうえで
sudo apt-get install ros-VERSION-velodyne
それぞれのterminalに以下のコマンドを打ち込むことで可視化をすることが出来ます.
roscore
roslaunch velodyne_pointcloud 32e_points.launch
rviz
mapping
センサーに高剛性フレームを取り付け,大学でmappingを行いました.
(センサーが2kg程度あるので,結構この姿勢はつらい)
mappingアルゴリズムとしてはLego-Loamを使いました.
まずは屋内で
大学を徘徊してる pic.twitter.com/I9OBE1sFdO
— EG (@eg117117) November 19, 2021
結果
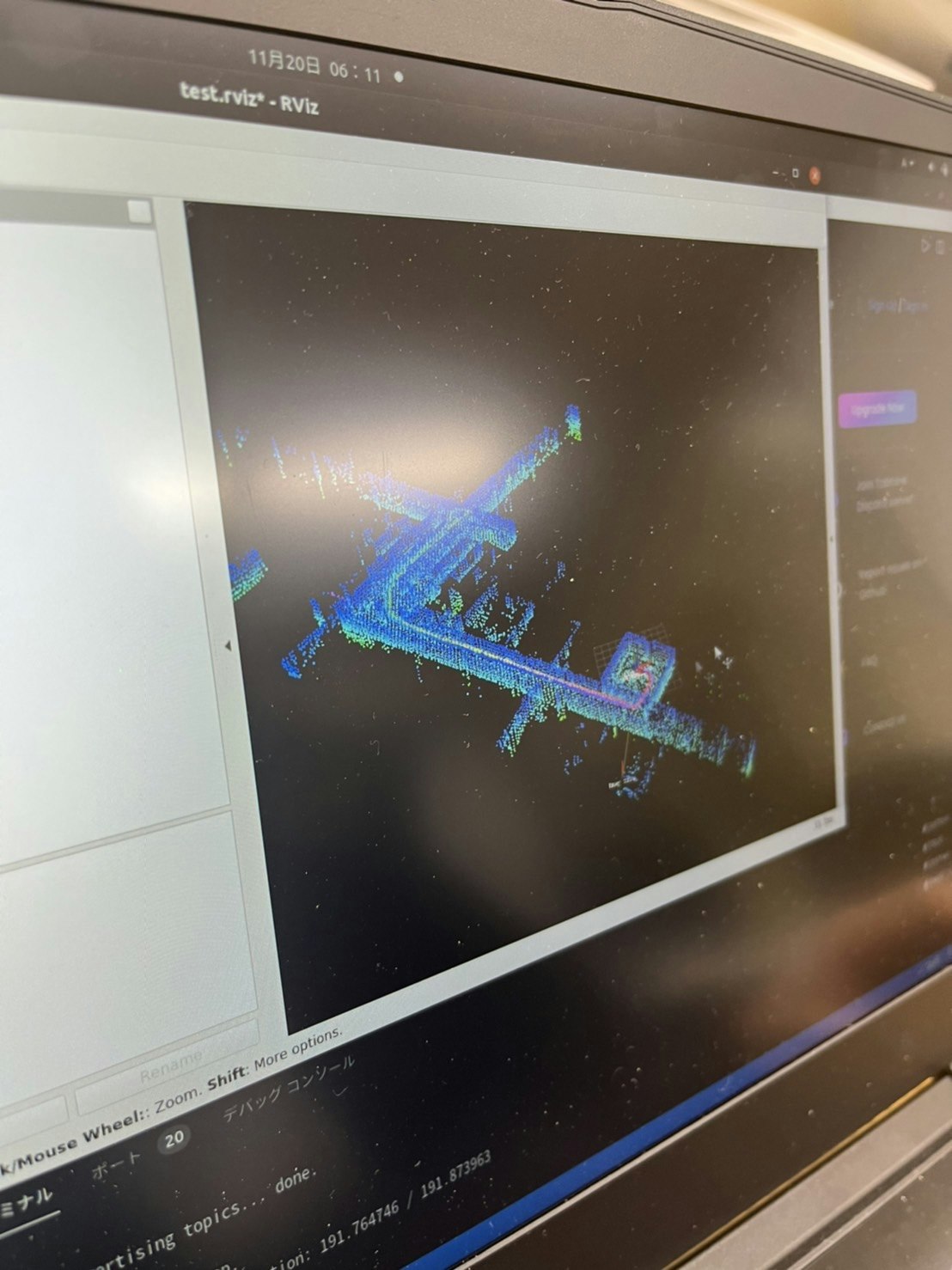
手がブレブレだったにも関わらず素晴らしいmapping結果ですね・・・!
屋内が素晴らしい出来だったため,そのまま屋外でもmappingを行いました.
屋外の結果
筑波大学をmappingしてみた pic.twitter.com/lFf3xbW4Fo
— EG (@eg117117) November 19, 2021
大学のどこかまるわかりですね!
最後に
mappingしたデータはpcdとして出力されるのでunity等でも扱えるようです.
余裕があればもっと色んなところをmappingしに行きたいですね!!!
余談 つくチャレチームへの勧誘
私@eg117117が代表を勤める「teamEG」では
自立移動ロボットの記録会であるつくばチャレンジを目指して活動しております.
ただ2021/11現在,チームメンバーが3人しかいないためマンパワーが不足しております・・・
この記事をみてご興味のわいた方は@eg117117のDMまでご連絡いただけると幸いです.
今年の成果↓
確認走行区間を走ってみた#つくチャレ pic.twitter.com/rGrmxNXwEN
— EG (@eg117117) October 18, 2021
素晴らしい……… pic.twitter.com/gLh81zTfzf
— EG (@eg117117) October 14, 2021