はじめに
生成AIを用いてYOLO v3の論文「YOLOv3: An Incremental Improvement」の内容を(なるべく)把握してみました。(生成AIが)論文の記載内容を始めから最後まで読んで、実際にどのような記載があるのかを把握します。
(論文の分かりやすい解説記事は見るのですが、実際の論文までチェックしないので、生成AIを使って内容を把握してみました。)
YOLOv3は、3つの異なるスケールでバウンディングボックスを予測し(Feature Pyramid Networks (FPN)の考え方に似た手法を用いて特徴を抽出)、2層前の特徴マップを2倍にアップサンプリングしてネットワークの初期段階からの別の特徴マップと結合。この方法により、アップサンプリングされた特徴からより意味のある意味情報を取得し、初期の特徴マップからはより細かな情報を得ることが分かりました。(末尾の「分かったこと」章を参照)
以降で、ChatGPTに聞いてみた例を記載します。
他例: 同類の方法を使って読んでみた結果
対象の論文
論文: (YOLO v3に関する論文)
[1804.02767] YOLOv3: An Incremental Improvement
https://arxiv.org/abs/1804.02767
(PDF: https://arxiv.org/pdf/1804.02767)
質問時の各章節の区切り部分
論文の中にある各章節を、下記のように区切って、部分毎に生成AIに内容を質問していきます。
- Abstract
- ---
- 1.-Introduction
- ---
- 2.-The Deal
- 2.1. Bounding Box Prediction
- ---
- 2.2. Class Prediction
- 2.3. Predictions Across Scales
- ---
- 2.4. Feature Extractor
- 2.5. Training
- ---
- 3.-How We Do
- ---
- 4.-Things We Tried That Didn’t Work
- ---
- 5.-What This All Means
- ---
- Rebuttal
生成AIへの質問方法
生成AIを活用して、知りたい記事・論文の1節分(適度な長さ)のテキストをコピー&ペーストして、その下に質問内容を「①~ ②~ …」と番号付きで書いて、生成AIに渡せば、全質問に一発で的確に回答してくれるので、非常に良好でした。記事全体を読む必要なく、知りたい点の情報だけを収集できます。
生成AIへの質問例:
(論文・記事の各章節を貼り付け)
上記の内容に関して下記の質問に回答下さい: (である調で記載、質問に対して該当するものが無ければ無しと記載、対応する図/表番号があれば記載)
①何についての記載か? + 要旨は何? + 対応する図/表番号を列挙 (要旨は箇条書きで記載、図/表番号は横1列で羅列)
②改良点・工夫点・テクニック等の記載があれば説明下さい。
③性能が向上した記載があれば説明下さい。(具体値があれば記載、対応する図/表番号があれば記載)
④メカニズムの解明・なぜそうなるのか等の記載があれば説明下さい。
⑤比較の記載があれば違いを表でまとめて下さい。(対応する図/表番号があれば明記)
⑥上記⑤以外で表に出来そうな部分があれば表でまとめて下さい。(対応する図/表番号があれば記載)
※回答が長くなりそうな場合は、適宜、分けて質問: ①②③、④⑤⑥
続けて下記の質問に追加で回答下さい:
⑦具体的な処理方法の記載があれば説明下さい。(簡略化せずに全て記載、対応する図/表/式番号があれば記載、既存手法の適用であれば引用元を記載)
⑧具体的な数値の記載を全て列挙して、表にまとめて下さい。(|数値|説明|の表)
※具体的な処理方法の記載がありそうであれば、適宜、追加で質問。
質問内容は、記事・論文を読んでいていつも知りたいと思う点(改良点・工夫点・テクニック・メカニズムの解明)にしています。また、表で比較した方が素早く把握できるので、可能であれば記事を表に変換するようにしています。
論文・記事を貼り付けるテキストの長さは、1節分程度の量にとどめた方が、良い回答が得られました。生成AIの回答の文量が多くなってくると、回答が長くなり過ぎないように、生成AIが勝手に(適度に)端折り始めてしまい、重要な点が回答から抜けてしまう可能性が高まります。
事前知識
機械学習についてある程度知っていないと、生成AIに質問しても、その回答内容だけでは理解できないと思います。生成AIの回答は、論文の内容をあまり変えずに、要点をそのまま掻い摘んで回答するような形になっています。
YOLOについての分かりやすい解説記事(下記)等を事前にチェックして、中核部分の内容をあらかじめ分かっていると、理解しやすいと思います。生成AIは実際の細かい処理方法自体を分かりやすく説明してはくれない傾向があります。
注意点
論文のテキスト内容だけを貼り付けて、生成AIに質問しています。論文の中の図・表の部分は貼り付けていません。図・表の内容は生成AIの回答には含まれず、別途論文を見る必要があります。
以降で、生成AIの回答内容が読みにくい・分かりづらい場合は、論文の本文でも同じように書かれてあり、論文の本文を読んでも同じように分かりづらいことが多くあります。論文では、既存研究等があるため、多くの説明を省略・一言だけサラッと書かれてある等、同種の研究に取り組む人でなければ、なかなか全容の理解に辿りつくのは難しい側面があります。この点は、生成AIの回答性能が悪いのではなく、論文という性質上、生じるものと考えています。
生成AIに質問
以降で、ChatGPTに実際に聞いてみた例を記載します。
生成AIへの質問&回答の全容
生成AIへの質問&回答の全容・詳細:
Abstract
▼質問(人間)
質問内容全体はここをクリック
(論文・記事の各章節を貼り付け) Abstract We present some updates to YOLO! We made a bunch of little design changes to make it better. We also trained this new network that’s pretty swell. It’s a little bigger than last time but more accurate. It’s still fast though, don’t worry. At 320 × 320 YOLOv3 runs in 22 ms at 28.2 mAP, as accurate as SSD but three times faster. When we look at the old .5 IOU mAP detection metric YOLOv3 is quite good. It achieves 57.9 AP50 in 51 ms on a Titan X, com- pared to 57.5 AP50 in 198 ms by RetinaNet, similar perfor- mance but 3.8× faster. As always, all the code is online at https://pjreddie.com/yolo/.上記の内容に関して下記の質問に回答下さい: (である調で記載、質問に対して該当するものが無ければ無しと記載、対応する図/表番号があれば記載)
①何についての記載か? + 要旨は何? + 対応する図/表番号を列挙 (要旨は箇条書きで記載、図/表番号は横1列で羅列)
②改良点・工夫点・テクニック等の記載があれば説明下さい。
③性能が向上した記載があれば説明下さい。(具体値があれば記載、対応する図/表番号があれば記載)
④メカニズムの解明・なぜそうなるのか等の記載があれば説明下さい。
⑤比較の記載があれば違いを表でまとめて下さい。(対応する図/表番号があれば明記)
⑥上記⑤以外で表に出来そうな部分があれば表でまとめて下さい。(対応する図/表番号があれば記載)
▼生成AIの回答(ChatGPT-4o)
①何についての記載か? + 要旨は何? + 図/表番号列挙
このセクションでは、YOLOv3に関する最新のアップデートとその性能評価について記載されている。
要旨
- YOLOv3の設計にいくつかの小さな変更が加えられた。
- 新しいネットワークは以前より少し大きいが、精度が向上している。
- YOLOv3は依然として高速であり、320×320の入力サイズで28.2 mAPを22msで達成。
- 従来の.5 IOU mAP指標でのYOLOv3の性能は良好であり、Titan Xで51msで57.9 AP50を達成している。
- 同等の性能を持つRetinaNetと比較して、YOLOv3は3.8倍速い。
対応する図/表番号: 無し
②改良点・工夫点・テクニック等の記載
YOLOv3の設計に小さな変更が加えられ、ネットワークが以前より大きくなったが、精度が向上していることが記載されている。
③性能が向上した記載
- YOLOv3は320×320の入力サイズで28.2 mAPを22msで達成しており、SSDと同等の精度を保ちながら3倍の速度を達成している。
- YOLOv3は.5 IOU mAP指標で57.9 AP50を51msで達成し、RetinaNetの57.5 AP50を198msで達成する性能と比較して3.8倍の速度で動作している。
④メカニズムの解明・なぜそうなるのか等の記載
無し
⑤比較の記載
| モデル | AP50 | 処理時間(ms) | 備考 |
|---|---|---|---|
| YOLOv3 | 57.9 | 51 | RetinaNetと同等の精度で3.8倍速い |
| RetinaNet | 57.5 | 198 |
⑥上記⑤以外で表に出来そうな部分
無し

▼質問(人間)
一般的に、上記の「28.2 mAP」と「57.9 AP50」の指標の違いは何?
▼生成AIの回答(ChatGPT-4o)
「28.2 mAP」と「57.9 AP50」の指標の違いは、以下の通りである。
1. mAP (mean Average Precision):
- 定義: mAPは、複数の異なるIoU (Intersection over Union) 閾値でのAP (Average Precision) を平均化した値である。通常、IoUの閾値を0.5から0.95まで0.05刻みで変えたときのAPを計算し、その平均を取ったものがmAPとなる。
- 用途: mAPは、モデルの総合的な性能を評価するために使用される。特に、高精度な位置検出が求められる場合に重要な指標である。
2. AP50 (Average Precision at IoU=0.5):
- 定義: AP50は、IoUが0.5のときの平均精度を表す指標である。IoUが0.5以上であると正解とみなされ、そのときのPrecision (適合率) とRecall (再現率) を用いてAPを計算する。
- 用途: AP50は、位置のずれに対して寛容な検出性能を評価する指標であり、比較的緩やかな検出基準を採用する際に使用される。
まとめ
- mAP: 複数のIoU閾値に対するモデルの総合的な性能を示す。
- AP50: IoU=0.5という特定の閾値での性能を示し、より緩やかな基準での検出性能を評価する。
▼質問(人間)
YOLO v2のmAPと、YOLO v3のmAPは、異なる指標ですか?
▼生成AIの回答(ChatGPT-4o)
はい、YOLOv2とYOLOv3で報告されているmAPは異なる指標である可能性が高いです。具体的には、評価方法やIoU閾値の設定が異なることが一般的です。
1. YOLOv2のmAP:
- YOLOv2で報告されているmAPは、通常、IoU=0.5を基準としたAP50の平均として計算されています。つまり、YOLOv2のmAPは、AP50に相当するものです。
2. YOLOv3のmAP:
- YOLOv3では、mAPがより広範なIoU閾値(例えば、0.5から0.95まで0.05刻みでの平均)で計算されることが多いです。これにより、モデルの検出性能をより厳密に評価することが可能となります。
結論:
- YOLOv2のmAPはAP50(IoU=0.5)を基準にしたものと考えられ、YOLOv3のmAPはより厳しい基準(0.5から0.95までの範囲での平均)で計算されたものである可能性が高いです。このため、直接的な比較は慎重に行う必要があります。
参考: mAP(mean Average Precision) のまとめ #map - Qiita
1. Introduction
▼質問(人間)
質問内容全体はここをクリック
(論文・記事の各章節を貼り付け) 1. Introduction Sometimes you just kinda phone it in for a year, you know? I didn’t do a whole lot of research this year. Spent a lot of time on Twitter. Played around with GANs a little. I had a little momentum left over from last year [12] [1]; I managed to make some improvements to YOLO. But, hon- estly, nothing like super interesting, just a bunch of small changes that make it better. I also helped out with other people’s research a little. Actually, that’s what brings us here today. We have a camera-ready deadline [4] and we need to cite some of the random updates I made to YOLO but we don’t have a source. So get ready for a TECH REPORT! The great thing about tech reports is that they don’t need intros, y’all know why we’re here. So the end of this intro- duction will signpost for the rest of the paper. First we’ll tell you what the deal is with YOLOv3. Then we’ll tell you how we do. We’ll also tell you about some things we tried that didn’t work. Finally we’ll contemplate what this all means.上記の内容に関して下記の質問に回答下さい: (である調で記載、質問に対して該当するものが無ければ無しと記載、対応する図/表番号があれば記載)
①何についての記載か? + 要旨は何? + 対応する図/表番号を列挙 (要旨は箇条書きで記載、図/表番号は横1列で羅列)
②改良点・工夫点・テクニック等の記載があれば説明下さい。
③性能が向上した記載があれば説明下さい。(具体値があれば記載、対応する図/表番号があれば記載)
④メカニズムの解明・なぜそうなるのか等の記載があれば説明下さい。
⑤比較の記載があれば違いを表でまとめて下さい。(対応する図/表番号があれば明記)
⑥上記⑤以外で表に出来そうな部分があれば表でまとめて下さい。(対応する図/表番号があれば記載)
▼生成AIの回答(ChatGPT-4o)
①何についての記載か? + 要旨は何? + 図/表番号列挙
このセクションでは、YOLOv3に関する技術レポートの目的と、導入部分としての背景が簡単に述べられている。
要旨
- 今年は特に大きな研究は行わなかったが、YOLOにいくつかの小さな改善を加えた。
- 本レポートでは、YOLOv3に対するいくつかの更新を説明するために技術レポートを作成した。
- YOLOv3の概要、実施したこと、試してみたがうまくいかなかったこと、そしてその結果について述べる予定である。
対応する図/表番号: 無し
②改良点・工夫点・テクニック等の記載
- YOLOv3に対していくつかの小さな変更が行われたことが述べられているが、具体的な改良点や工夫点の詳細はこのセクションには記載されていない。
③性能が向上した記載
無し
④メカニズムの解明・なぜそうなるのか等の記載
無し
⑤比較の記載
無し
⑥上記⑤以外で表に出来そうな部分
無し
2. The Deal
2.1. Bounding Box Prediction
▼質問(人間)
質問内容全体はここをクリック
(論文・記事の各章節を貼り付け) 2. The Deal So here’s the deal with YOLOv3: We mostly took good ideas from other people. We also trained a new classifier network that’s better than the other ones. We’ll just take you through the whole system from scratch so you can un- derstand it all. 2.1. Bounding Box Prediction Following YOLO9000 our system predicts bounding boxes using dimension clusters as anchor boxes [15]. The network predicts 4 coordinates for each bounding box, tx, ty , tw, th. If the cell is offset from the top left corner of the image by (cx, cy ) and the bounding box prior has width and height pw, ph, then the predictions correspond to: bx = σ(tx) + cx by = σ(ty ) + cy bw = pwetw bh = pheth During training we use sum of squared error loss. If the ground truth for some coordinate prediction is ˆt* our gra- dient is the ground truth value (computed from the ground truth box) minus our prediction: ˆt* − t*. This ground truth value can be easily computed by inverting the equations above. YOLOv3 predicts an objectness score for each bounding box using logistic regression. This should be 1 if the bound- ing box prior overlaps a ground truth object by more than any other bounding box prior. If the bounding box prior is not the best but does overlap a ground truth object by more than some threshold we ignore the prediction, follow- ing [17]. We use the threshold of .5. Unlike [17] our system only assigns one bounding box prior for each ground truth object. If a bounding box prior is not assigned to a ground truth object it incurs no loss for coordinate or class predic- tions, only objectness.上記の内容に関して下記の質問に回答下さい: (である調で記載、質問に対して該当するものが無ければ無しと記載、対応する図/表番号があれば記載)
①何についての記載か? + 要旨は何? + 対応する図/表番号を列挙 (要旨は箇条書きで記載、図/表番号は横1列で羅列)
②改良点・工夫点・テクニック等の記載があれば説明下さい。
③性能が向上した記載があれば説明下さい。(具体値があれば記載、対応する図/表番号があれば記載)
④メカニズムの解明・なぜそうなるのか等の記載があれば説明下さい。
⑤比較の記載があれば違いを表でまとめて下さい。(対応する図/表番号があれば明記)
⑥上記⑤以外で表に出来そうな部分があれば表でまとめて下さい。(対応する図/表番号があれば記載)
▼生成AIの回答(ChatGPT-4o)
①何についての記載か? + 要旨は何? + 図/表番号列挙
このセクションでは、YOLOv3のバウンディングボックス予測手法について説明されている。
要旨
- YOLOv3は、YOLO9000の手法を継承し、次元クラスターをアンカーボックスとして使用するバウンディングボックス予測を行う。
- 各バウンディングボックスの4つの座標 (tx, ty, tw, th) を予測し、これらの座標はオフセットとアンカーボックスの幅と高さに基づいて計算される。
- トレーニング時には、二乗誤差損失を使用し、各座標の予測誤差に基づいて勾配が計算される。
- YOLOv3は、ロジスティック回帰を使用して各バウンディングボックスのオブジェクトネススコアを予測する。
対応する図/表番号: 無し
②改良点・工夫点・テクニック等の記載
- YOLOv3は、YOLO9000の手法を継承しつつ、アンカーボックスを用いたバウンディングボックス予測を採用している。
- オブジェクトネススコアの予測にロジスティック回帰を使用し、各バウンディングボックスのスコアを計算する技術が用いられている。
- バウンディングボックス予測の際、オフセットとアンカーボックスの次元に基づいた座標変換を行っている。
③性能が向上した記載
無し
④メカニズムの解明・なぜそうなるのか等の記載
- YOLOv3では、バウンディングボックスの各座標を予測する際、オフセットとアンカーボックスの次元に基づいて計算されるため、精度の高い予測が可能であると考えられる。
- また、ロジスティック回帰を使用したオブジェクトネススコアの予測により、バウンディングボックスが適切にフィルタリングされる仕組みが説明されている。
⑤比較の記載
無し
⑥上記⑤以外で表に出来そうな部分
無し
▼質問(人間)
上記の内容に対して、YOLO v2とYOLO v3の違いを具体的に説明下さい。
▼生成AIの回答(ChatGPT-4o)
YOLOv2とYOLOv3の違いは、特にバウンディングボックスの予測方法とオブジェクトネススコアの計算方法において顕著である。以下に、具体的な違いを説明する。
バウンディングボックス予測
-
YOLOv2:
- YOLOv2では、バウンディングボックスの予測において、アンカーボックスを使用せずに、直接座標を予測する手法を採用していた。
- 各グリッドセルに対して、直接4つの座標 (tx, ty, tw, th) を予測し、これらの座標を基にバウンディングボックスを生成していた。
-
YOLOv3:
- YOLOv3では、YOLO9000の手法を継承し、次元クラスターをアンカーボックスとして使用するバウンディングボックス予測を採用している。
- 各バウンディングボックスの4つの座標 (tx, ty, tw, th) は、オフセットとアンカーボックスの幅と高さに基づいて計算される。
- これにより、異なるスケールやアスペクト比を持つオブジェクトに対して、より柔軟で正確なバウンディングボックス予測が可能となる。
オブジェクトネススコアの計算
-
YOLOv2:
- YOLOv2では、各バウンディングボックスに対して、オブジェクトネススコアを予測する際、単純な線形回帰を使用していた。このスコアは、予測されたバウンディングボックスがどれだけ正確にオブジェクトを囲んでいるかを表している。
-
YOLOv3:
- YOLOv3では、オブジェクトネススコアの計算にロジスティック回帰を使用している。これにより、各バウンディングボックスがオブジェクトを含む確率をより正確に予測できるようになった。
- また、YOLOv3では、バウンディングボックスがグラウンドトゥルースオブジェクトと50%以上のIoUを持つ場合のみ、オブジェクトネススコアが1になるように設定されている。この設定は、より精度の高い検出を可能にしている。
損失関数
-
YOLOv2:
- YOLOv2では、座標誤差、クラス誤差、そしてオブジェクトネススコアの誤差を含む単純な損失関数が使用されていた。
-
YOLOv3:
- YOLOv3では、特にオブジェクトネススコアの計算にロジスティック回帰が導入されたことで、損失関数もこれに対応して調整されている。これにより、無関係なバウンディングボックスに対する誤差の影響が軽減されている。
結論
- YOLOv3は、YOLOv2に比べてバウンディングボックス予測の柔軟性と精度が向上しており、ロジスティック回帰を用いたオブジェクトネススコアの導入によって、検出精度がさらに改善されている。これにより、YOLOv3はより広範なオブジェクトサイズや形状に対しても対応できるようになった。
2.2. Class Prediction
2.3. Predictions Across Scales
▼質問(人間)
質問内容全体はここをクリック
(論文・記事の各章節を貼り付け) 2.2. Class Prediction Each box predicts the classes the bounding box may con- tain using multilabel classification. We do not use a softmax as we have found it is unnecessary for good performance, instead we simply use independent logistic classifiers. Dur- ing training we use binary cross-entropy loss for the class predictions. This formulation helps when we move to more complex domains like the Open Images Dataset [7]. In this dataset there are many overlapping labels (i.e. Woman and Person). Using a softmax imposes the assumption that each box has exactly one class which is often not the case. A multilabel approach better models the data. 2.3. Predictions Across Scales YOLOv3 predicts boxes at 3 different scales. Our sys- tem extracts features from those scales using a similar con- cept to feature pyramid networks [8]. From our base fea- ture extractor we add several convolutional layers. The last of these predicts a 3-d tensor encoding bounding box, ob- jectness, and class predictions. In our experiments with COCO [10] we predict 3 boxes at each scale so the tensor is N × N × [3 ∗ (4 + 1 + 80)] for the 4 bounding box offsets, 1 objectness prediction, and 80 class predictions. Next we take the feature map from 2 layers previous and upsample it by 2×. We also take a feature map from earlier in the network and merge it with our upsampled features using concatenation. This method allows us to get more meaningful semantic information from the upsampled fea- tures and finer-grained information from the earlier feature map. We then add a few more convolutional layers to pro- cess this combined feature map, and eventually predict a similar tensor, although now twice the size. We perform the same design one more time to predict boxes for the final scale. Thus our predictions for the 3rd scale benefit from all the prior computation as well as fine- grained features from early on in the network. We still use k-means clustering to determine our bound- ing box priors. We just sort of chose 9 clusters and 3 scales arbitrarily and then divide up the clusters evenly across scales. On the COCO dataset the 9 clusters were: (10 × 13), (16 × 30), (33 × 23), (30 × 61), (62 × 45), (59 × 119), (116 × 90), (156 × 198), (373 × 326).上記の内容に関して下記の質問に回答下さい: (である調で記載、質問に対して該当するものが無ければ無しと記載、対応する図/表番号があれば記載)
①何についての記載か? + 要旨は何? + 対応する図/表番号を列挙 (要旨は箇条書きで記載、図/表番号は横1列で羅列)
②改良点・工夫点・テクニック等の記載があれば説明下さい。
③性能が向上した記載があれば説明下さい。(具体値があれば記載、対応する図/表番号があれば記載)
④メカニズムの解明・なぜそうなるのか等の記載があれば説明下さい。
⑤比較の記載があれば違いを表でまとめて下さい。(対応する図/表番号があれば明記)
⑥上記⑤以外で表に出来そうな部分があれば表でまとめて下さい。(対応する図/表番号があれば記載)
▼生成AIの回答(ChatGPT-4o)
①何についての記載か? + 要旨は何? + 図/表番号列挙
このセクションでは、YOLOv3におけるクラス予測とスケールにわたる予測の詳細が記載されている。対応する図や表の記載は無し。
要旨
- クラス予測では、マルチラベル分類を用い、ソフトマックスではなく独立したロジスティック分類器を使用している。
- YOLOv3は3つの異なるスケールでボックスを予測し、各スケールでの予測は異なる特徴量から得られる。
- スケールごとに特徴マップを抽出し、アップサンプリングと結合を行うことで、より意味のあるセマンティック情報と細かい情報を取り出している。
- COCOデータセットでは、9つのクラスターを使ってバウンディングボックスの優先順位を決定している。
②改良点・工夫点・テクニック等の記載
- マルチラベル分類を採用することで、ラベルが重複するデータセットに対応できるようにしている。
- スケールにわたる予測を可能にするために、特徴マップのアップサンプリングと結合を行う設計を導入している。
- バウンディングボックスの優先順位決定にk-meansクラスタリングを使用し、9つのクラスターと3つのスケールを用いる工夫をしている。
③性能が向上した記載
無し
④メカニズムの解明・なぜそうなるのか等の記載
- マルチラベル分類を使用することで、各ボックスに複数のクラスを割り当てることができ、データのモデリングがより正確になる。これにより、Open Images Datasetのような複雑なドメインでの性能向上が期待できる。
- アップサンプリングと特徴マップの結合により、深層ネットワークの意味情報と浅層ネットワークの細かい情報を同時に活用することができる。
⑤比較の記載
| 設計変更点 | 効果 |
|---|---|
| ソフトマックスからロジスティック分類器への変更 | 複数のクラスを持つラベルに対して柔軟に対応可能 |
| 単一スケールから3スケールへの変更 | 異なるスケールでの精度が向上 |
⑥上記⑤以外で表に出来そうな部分
無し
▼質問(人間)
続けて下記の質問に追加で回答下さい:
⑦具体的な処理方法の記載があれば説明下さい。(具体値があれば記載、対応する式番号があれば記載、既存手法の適用であれば引用元を明記)
⑧具体的な数値の記載を全て列挙して、表にまとめて下さい。(|数値|説明|の表)
▼生成AIの回答(ChatGPT-4o)
⑦具体的な処理方法の記載
- クラス予測: マルチラベル分類において、各ボックスが含む可能性のあるクラスを予測する際に、ソフトマックス関数は使用されず、独立したロジスティック分類器が使用されている。また、学習時にはクラス予測に対してバイナリクロスエントロピー損失を使用している。
- スケールにわたる予測: YOLOv3は3つの異なるスケールでボックスを予測する。特徴量はFeature Pyramid Networks (FPN)のような手法で抽出され、アップサンプリングと結合を行い、各スケールにおいて最終的な予測を行う。
- バウンディングボックスの予測: YOLOv3は、3つのスケールにわたって、各スケールで9つの異なるクラスターを用いたバウンディングボックスの予測を行うために、k-meansクラスタリングを使用している。
⑧具体的な数値の記載を全て列挙して、表にまとめ
| 数値 | 説明 |
|---|---|
| 3 | 予測が行われるスケールの数 |
| 9 | バウンディングボックスのクラスターの数 |
| N × N × [3 ∗ (4 + 1 + 80)] | 予測される3次元テンソルのサイズ。各スケールで4つのバウンディングボックスオフセット、1つのオブジェクト予測、80のクラス予測を含む |
| 2 | アップサンプリング時の倍率 |
| (10 × 13), (16 × 30), (33 × 23), (30 × 61), (62 × 45), (59 × 119), (116 × 90), (156 × 198), (373 × 326) | COCOデータセットで使用される9つのバウンディングボックスのクラスターサイズ |
▼質問(人間)
⑦具体的な処理方法の記載を、簡略化せず元文内容から全て抜き出して説明下さい。
▼生成AIの回答(ChatGPT-4o)
⑦具体的な処理方法の記載
-
クラス予測:
- 各ボックスは、そのバウンディングボックスが含む可能性のあるクラスをマルチラベル分類を用いて予測する。具体的には、各クラスに対して独立したロジスティック回帰分類器を用いる。このアプローチにより、ソフトマックスを使用しなくても十分なパフォーマンスを達成できるとしている。訓練時には、クラス予測のためにバイナリクロスエントロピー損失を使用する。
- この手法は、Open Images Datasetのようなより複雑なドメインに移行する際に役立つ。例えば、「Woman」と「Person」のように、複数のラベルが重複することがある。このようなデータに対してソフトマックスを用いると、各ボックスが1つのクラスのみを持つという前提を課してしまうため、しばしば正しいデータのモデリングができなくなる。マルチラベルアプローチは、この問題を解決し、データをより適切にモデリングする。
-
スケールにわたる予測:
- YOLOv3は、3つの異なるスケールでバウンディングボックスを予測する。このシステムは、Feature Pyramid Networks (FPN)の考え方に似た手法を用いて、これらのスケールから特徴を抽出する。具体的には、基本的な特徴抽出器(ベースネットワーク)からいくつかの畳み込み層を追加する。これらの最後の層は、バウンディングボックス、オブジェクトネス、およびクラス予測を符号化する3次元テンソルを予測する。COCOデータセットでの実験では、各スケールで3つのボックスを予測しているため、テンソルのサイズは
N × N × [3 ∗ (4 + 1 + 80)]である。ここで、4はバウンディングボックスのオフセット、1はオブジェクトネスの予測、80はクラス予測を表す。 - さらに、2層前の特徴マップを2倍にアップサンプリングし、ネットワークの初期段階からの別の特徴マップと結合する。この方法により、アップサンプリングされた特徴からより意味のある意味情報を取得し、初期の特徴マップからはより細かな情報を得ることができる。その後、いくつかの畳み込み層を追加して、この結合された特徴マップを処理し、最終的に同様のテンソルを予測するが、この場合、テンソルのサイズは2倍になる。
- 同様の設計をもう一度行い、最終的なスケールでのバウンディングボックス予測を行う。このようにして、3番目のスケールでの予測は、これまでのすべての計算結果と、ネットワークの初期段階からの細かな特徴情報を活用することができる。
- YOLOv3は、3つの異なるスケールでバウンディングボックスを予測する。このシステムは、Feature Pyramid Networks (FPN)の考え方に似た手法を用いて、これらのスケールから特徴を抽出する。具体的には、基本的な特徴抽出器(ベースネットワーク)からいくつかの畳み込み層を追加する。これらの最後の層は、バウンディングボックス、オブジェクトネス、およびクラス予測を符号化する3次元テンソルを予測する。COCOデータセットでの実験では、各スケールで3つのボックスを予測しているため、テンソルのサイズは
-
バウンディングボックスの予測:
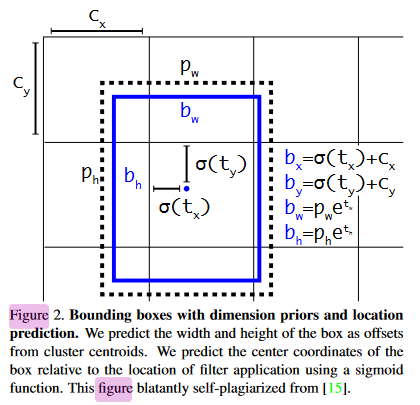
- YOLOv3は、YOLO9000と同様に、次元クラスタリングを使用してアンカーボックスとしてのバウンディングボックスを予測する。ネットワークは各バウンディングボックスの4つの座標(tx, ty, tw, th)を予測する。もしセルが画像の左上隅から(cx, cy)だけオフセットされており、バウンディングボックスの事前設定が幅pwと高さphを持っている場合、予測は以下の式に対応する:
- bx = σ(tx) + cx
- by = σ(ty) + cy
- bw = pw * e^(tw)
- bh = ph * e^(th)
- 訓練中は、二乗誤差損失を使用する。ある座標予測に対する真の値が
ˆt*である場合、勾配は真の値(真のバウンディングボックスから計算される)から予測値を引いたものとなる:ˆt* − t*。この真の値は、上記の式を逆にして容易に計算できる。 - YOLOv3は、各バウンディングボックスに対してロジスティック回帰を用いてオブジェクトネススコアを予測する。このスコアは、バウンディングボックスの事前設定が他のバウンディングボックスの事前設定よりも多くの真のオブジェクトと重なる場合に1であるべきである。バウンディングボックスの事前設定が最適でないが、0.5以上の閾値を超える真のオブジェクトと重なっている場合は、その予測を無視する。YOLOv3のシステムでは、各真のオブジェクトに対して1つのバウンディングボックス事前設定のみが割り当てられる。もしバウンディングボックスの事前設定が真のオブジェクトに割り当てられない場合、その座標やクラスの予測に対して損失を発生させることはなく、オブジェクトネスに対してのみ損失が発生する。
- YOLOv3は、YOLO9000と同様に、次元クラスタリングを使用してアンカーボックスとしてのバウンディングボックスを予測する。ネットワークは各バウンディングボックスの4つの座標(tx, ty, tw, th)を予測する。もしセルが画像の左上隅から(cx, cy)だけオフセットされており、バウンディングボックスの事前設定が幅pwと高さphを持っている場合、予測は以下の式に対応する:
2.4. Feature Extractor
2.5. Training
▼質問(人間)
質問内容全体はここをクリック
(論文・記事の各章節を貼り付け) 2.4. Feature Extractor We use a new network for performing feature extraction. Our new network is a hybrid approach between the network used in YOLOv2, Darknet-19, and that newfangled residual network stuff. Our network uses successive 3 × 3 and 1 × 1 convolutional layers but now has some shortcut connections as well and is significantly larger. It has 53 convolutional layers so we call it.... wait for it..... Darknet-53! This new network is much more powerful than Darknet- 19 but still more efficient than ResNet-101 or ResNet-152. Here are some ImageNet results:Backbone Top-1 Top-5 Bn Ops BFLOP/s FPS
Darknet-19 [15] 74.1 91.8 7.29 1246 171
ResNet-101[5] 77.1 93.7 19.7 1039 53
ResNet-152 [5] 77.6 93.8 29.4 1090 37
Darknet-53 77.2 93.8 18.7 1457 78
Table 2. Comparison of backbones. Accuracy, billions of oper-
ations, billion floating point operations per second, and FPS for
various networks.
Each network is trained with identical settings and tested
at 256 × 256, single crop accuracy. Run times are measured
on a Titan X at 256 × 256. Thus Darknet-53 performs on
par with state-of-the-art classifiers but with fewer floating
point operations and more speed. Darknet-53 is better than
ResNet-101 and 1.5× faster. Darknet-53 has similar perfor-
mance to ResNet-152 and is 2× faster.
Darknet-53 also achieves the highest measured floating
point operations per second. This means the network struc-
ture better utilizes the GPU, making it more efficient to eval-
uate and thus faster. That’s mostly because ResNets have
just way too many layers and aren’t very efficient.
2.5. Training
We still train on full images with no hard negative mining
or any of that stuff. We use multi-scale training, lots of data
augmentation, batch normalization, all the standard stuff.
We use the Darknet neural network framework for training
and testing [14].
上記の内容に関して下記の質問に回答下さい: (である調で記載、質問に対して該当するものが無ければ無しと記載、対応する図/表番号があれば記載)
①何についての記載か? + 要旨は何? + 対応する図/表番号を列挙 (要旨は箇条書きで記載、図/表番号は横1列で羅列)
②改良点・工夫点・テクニック等の記載があれば説明下さい。
③性能が向上した記載があれば説明下さい。(具体値があれば記載、対応する図/表番号があれば記載)
④メカニズムの解明・なぜそうなるのか等の記載があれば説明下さい。
⑤比較の記載があれば違いを表でまとめて下さい。(対応する図/表番号があれば明記)
⑥上記⑤以外で表に出来そうな部分があれば表でまとめて下さい。(対応する図/表番号があれば記載)
▼生成AIの回答(ChatGPT-4o)
①何についての記載か? + 要旨は何? + 対応する図/表番号を列挙
-
何についての記載か:
- YOLOv3の特徴抽出器(Feature Extractor)とトレーニング方法についての記載である。
-
要旨:
- Darknet-19とResNetのハイブリッドアプローチである新しい特徴抽出ネットワークDarknet-53を導入。
- Darknet-53はResNet-101およびResNet-152と比較して、同等以上の性能を持ちながらも、より高速で効率的に動作する。
- トレーニングには、フルイメージを用いたマルチスケールトレーニングやデータ増強などの標準的な手法が使用される。
-
図/表番号:
- Table 2: Comparison of backbones.
②改良点・工夫点・テクニック等の記載
-
特徴抽出器の改良:
- 新しい特徴抽出ネットワークとして、Darknet-53を使用。これはDarknet-19のネットワークと新しいResidual Networkのアプローチを組み合わせたものであり、従来のDarknet-19よりも強力であるが、ResNet-101やResNet-152よりも効率的である。
- Darknet-53は、53の畳み込み層を持ち、より多くのショートカット接続を導入している。
-
トレーニングの工夫:
- トレーニングには、フルイメージ、マルチスケールトレーニング、データ増強、バッチ正規化といった標準的な手法が採用されている。
③性能が向上した記載
-
性能向上の具体値:
-
Top-1 精度: Darknet-53は77.2%、ResNet-101は77.1%、ResNet-152は77.6%。
-
Top-5 精度: Darknet-53は93.8%、ResNet-101は93.7%、ResNet-152は93.8%。
-
BFLOP/s: Darknet-53は1457、ResNet-101は1039、ResNet-152は1090。
-
FPS: Darknet-53は78、ResNet-101は53、ResNet-152は37。
-
対応する図/表番号:
- Table 2: Comparison of backbones.
-
④メカニズムの解明・なぜそうなるのか等の記載
- Darknet-53は、53層の畳み込み層を持ち、ResNetのようにショートカット接続を使用することで、深いネットワークの効果的な学習を実現している。この構造は、GPUの効率的な利用を促進し、より高速で効率的な評価を可能にしている。また、ResNetと比べて層が少ないため、計算効率が高く、処理速度が速くなる。
⑤比較の記載
- 比較表:
| Backbone | Top-1 (%) | Top-5 (%) | Bn Ops | BFLOP/s | FPS |
|---|---|---|---|---|---|
| Darknet-19 | 74.1 | 91.8 | 7.29 | 1246 | 171 |
| ResNet-101 | 77.1 | 93.7 | 19.7 | 1039 | 53 |
| ResNet-152 | 77.6 | 93.8 | 29.4 | 1090 | 37 |
| Darknet-53 | 77.2 | 93.8 | 18.7 | 1457 | 78 |
-
対応する図/表番号:
- Table 2: Comparison of backbones.
⑥上記⑤以外で表に出来そうな部分
- 該当なし。


▼質問(人間)
⑦具体的な処理方法の記載があれば説明下さい。(簡略化せずに全て記載、対応する図/表/式番号があれば記載、既存手法の適用であれば引用元を記載)
⑧具体的な数値の記載を全て列挙して、表にまとめて下さい。(|数値|説明|の表)
▼生成AIの回答(ChatGPT-4o)
⑦具体的な処理方法の記載
-
特徴抽出ネットワーク:
- 新しいネットワークは、YOLOv2で使用されたDarknet-19とResidual Networks(ResNet)のハイブリッドアプローチである。
-
ネットワーク構造:
- ネットワークは、連続する3×3および1×1の畳み込み層を使用するが、今回はショートカット接続も追加されている。
- Darknet-53には53の畳み込み層があり、これはResNet-101やResNet-152と比較しても大幅に大きい。
-
効率:
- Darknet-53は、計算効率が高く、ResNet-101やResNet-152よりも浮動小数点演算を少なくしながらも、同等の精度を実現している。
- 特に、ResNetに比べて層が少なく、GPUの効率的な利用を促進し、処理速度が速くなっている。
- 引用元: ResNetに関する部分は「He, K., Zhang, X., Ren, S., & Sun, J. (2016). Deep residual learning for image recognition. In Proceedings of the IEEE conference on computer vision and pattern recognition (pp. 770-778)」からの引用である。
-
トレーニング方法:
-
フルイメージでのトレーニング:
- トレーニングはフルイメージを使用して行い、ハードネガティブマイニングなどの手法は使用していない。
-
マルチスケールトレーニング:
- マルチスケールトレーニングが使用されており、異なる解像度のイメージに対してネットワークが適応できるようにしている。
-
データ増強とバッチ正規化:
- データ増強やバッチ正規化といった標準的なテクニックも使用されている。
-
フレームワーク:
- ダークネット(Darknet)ニューラルネットワークフレームワークがトレーニングおよびテストに使用されている。
-
フルイメージでのトレーニング:
⑧具体的な数値の記載
| 数値 | 説明 |
|---|---|
| 53 | Darknet-53の畳み込み層の数 |
| 74.1 | Darknet-19のTop-1精度 (%) |
| 91.8 | Darknet-19のTop-5精度 (%) |
| 7.29 | Darknet-19のBn Ops |
| 1246 | Darknet-19のBFLOP/s |
| 171 | Darknet-19のFPS |
| 77.1 | ResNet-101のTop-1精度 (%) |
| 93.7 | ResNet-101のTop-5精度 (%) |
| 19.7 | ResNet-101のBn Ops |
| 1039 | ResNet-101のBFLOP/s |
| 53 | ResNet-101のFPS |
| 77.6 | ResNet-152のTop-1精度 (%) |
| 93.8 | ResNet-152のTop-5精度 (%) |
| 29.4 | ResNet-152のBn Ops |
| 1090 | ResNet-152のBFLOP/s |
| 37 | ResNet-152のFPS |
| 77.2 | Darknet-53のTop-1精度 (%) |
| 93.8 | Darknet-53のTop-5精度 (%) |
| 18.7 | Darknet-53のBn Ops |
| 1457 | Darknet-53のBFLOP/s |
| 78 | Darknet-53のFPS |
3. How We Do
▼質問(人間)
質問内容全体はここをクリック
(論文・記事の各章節を貼り付け) 3. How We Do YOLOv3 is pretty good! See table 3. In terms of COCOs weird average mean AP metric it is on par with the SSD variants but is 3× faster. It is still quite a bit behind other models like RetinaNet in this metric though. However, when we look at the “old” detection metric of mAP at IOU= .5 (or AP50 in the chart) YOLOv3 is very strong. It is almost on par with RetinaNet and far above the SSD variants. This indicates that YOLOv3 is a very strong detector that excels at producing decent boxes for ob- jects. However, performance drops significantly as the IOU threshold increases indicating YOLOv3 struggles to get the boxes perfectly aligned with the object. In the past YOLO struggled with small objects. How- ever, now we see a reversal in that trend. With the new multi-scale predictions we see YOLOv3 has relatively high APS performance. However, it has comparatively worse performance on medium and larger size objects. More in- vestigation is needed to get to the bottom of this. When we plot accuracy vs speed on the AP50 metric (see figure 5) we see YOLOv3 has significant benefits over other detection systems. Namely, it’s faster and better.上記の内容に関して下記の質問に回答下さい: (である調で記載、質問に対して該当するものが無ければ無しと記載、対応する図/表番号があれば記載)
①何についての記載か? + 要旨は何? + 対応する図/表番号を列挙 (要旨は箇条書きで記載、図/表番号は横1列で羅列)
②改良点・工夫点・テクニック等の記載があれば説明下さい。
③性能が向上した記載があれば説明下さい。(具体値があれば記載、対応する図/表番号があれば記載)
④メカニズムの解明・なぜそうなるのか等の記載があれば説明下さい。
⑤比較の記載があれば違いを表でまとめて下さい。(対応する図/表番号があれば明記)
⑥上記⑤以外で表に出来そうな部分があれば表でまとめて下さい。(対応する図/表番号があれば記載)
▼生成AIの回答(ChatGPT-4o)
①何についての記載か? + 要旨は何? + 対応する図/表番号を列挙
- 何についての記載か: YOLOv3の性能評価に関する記載である。
-
要旨:
- YOLOv3はCOCOデータセットのmAPでSSDのバリアントと同等であり、3倍の速度を持つが、RetinaNetには劣る。
- AP50のメトリックでは、YOLOv3はRetinaNetに近く、SSDバリアントを大幅に上回る性能を示す。
- 特に小さなオブジェクトに対しては高いAPS性能を持つが、中型および大型オブジェクトに対しては比較的低い性能を示す。
- AP50メトリックでの精度と速度の比較では、YOLOv3が他の検出システムよりも優れていることが示されている。
- 対応する図/表番号: 表3, 図5
②改良点・工夫点・テクニック等の記載
YOLOv3では、マルチスケール予測により小さなオブジェクトに対する検出性能が向上している。また、AP50メトリックでの精度と速度のバランスが非常に優れていることが示されている。
③性能が向上した記載
YOLOv3はAP50メトリックでRetinaNetに近い性能を示し、SSDバリアントよりもはるかに高い性能を持っている。また、速度面では他の検出システムよりも優れている。具体的な数値として、COCOデータセットにおいてmAPおよびAP50の評価が行われているが、詳細な具体値は本文には記載されていない。
④メカニズムの解明・なぜそうなるのか等の記載
YOLOv3は、マルチスケール予測により小さなオブジェクトに対して高い検出性能を示しているが、中型および大型オブジェクトに対する性能が相対的に低くなっている。また、AP50メトリックでの高性能は、YOLOv3がオブジェクトに対して適切なバウンディングボックスを生成する能力が高いことを示しているが、IOUのしきい値が高くなるとパフォーマンスが低下することから、オブジェクトとの正確な整合性に課題があることが示唆されている。
⑤比較の記載
YOLOv3と他の検出システム(SSDバリアント、RetinaNet)の比較は以下の表でまとめる。
| システム | mAP (COCO) | AP50 | 速度 (3×) | 小オブジェクト性能 | 中型・大型オブジェクト性能 |
|---|---|---|---|---|---|
| YOLOv3 | SSDと同等 | RetinaNetに近い | SSDより高速 | 高い | 相対的に低い |
| SSDバリアント | 同等 | YOLOv3に劣る | SSDより遅い | 不明 | 不明 |
| RetinaNet | YOLOv3より優れる | 同等 | YOLOv3より遅い | 不明 | 不明 |
⑥上記⑤以外で表に出来そうな部分
表にまとめる内容は既に⑤に含まれているため、該当なし。
⑦具体的な処理方法の記載
-
COCOデータセットの評価: YOLOv3はCOCOデータセットにおけるmAP(平均適合率)とAP50の評価が行われている。mAPはオブジェクト検出の性能を総合的に評価する指標であり、AP50はIoUが0.5である場合の精度を示す。
-
マルチスケール予測: YOLOv3はマルチスケール予測を使用しており、異なるスケールの特徴マップを使用して検出を行う。この手法により、小さなオブジェクトに対する検出性能が向上している。
-
速度評価: YOLOv3の速度は他の検出システムと比較して非常に高速であり、特にSSDバリアントと比較して3倍の速度を持つ。
⑧具体的な数値の記載を全て列挙して、表にまとめ
| 数値 | 説明 |
|---|---|
| 3× | YOLOv3がSSDバリアントよりも高速であることを示す |
| .5 | AP50のIoUしきい値 |
| 高い | YOLOv3の小さなオブジェクトに対するAPS性能 |
| 低い | YOLOv3の中型・大型オブジェクトに対する性能 |


4. Things We Tried That Didn’t Work
▼質問(人間)
質問内容全体はここをクリック
(論文・記事の各章節を貼り付け) 4. Things We Tried That Didn’t Work We tried lots of stuff while we were working on YOLOv3. A lot of it didn’t work. Here’s the stuff we can remember. Anchor box x, y offset predictions. We tried using the normal anchor box prediction mechanism where you pre- dict the x, y offset as a multiple of the box width or height using a linear activation. We found this formulation de- creased model stability and didn’t work very well. Linear x, y predictions instead of logistic. We tried using a linear activation to directly predict the x, y offset instead of the logistic activation. This led to a couple point drop in mAP. Focal loss. We tried using focal loss. It dropped our mAP about 2 points. YOLOv3 may already be robust to the problem focal loss is trying to solve because it has sep- arate objectness predictions and conditional class predic- tions. Thus for most examples there is no loss from the class predictions? Or something? We aren’t totally sure. Dual IOU thresholds and truth assignment. Faster R- CNN uses two IOU thresholds during training. If a predic- tion overlaps the ground truth by .7 it is as a positive exam- ple, by [.3 − .7] it is ignored, less than .3 for all ground truth objects it is a negative example. We tried a similar strategy but couldn’t get good results. We quite like our current formulation, it seems to be at a local optima at least. It is possible that some of these techniques could eventually produce good results, perhaps they just need some tuning to stabilize the training.上記の内容に関して下記の質問に回答下さい: (である調で記載、質問に対して該当するものが無ければ無しと記載、対応する図/表番号があれば記載)
①何についての記載か? + 要旨は何? + 対応する図/表番号を列挙 (要旨は箇条書きで記載、図/表番号は横1列で羅列)
②改良点・工夫点・テクニック等の記載があれば説明下さい。
③性能が向上した記載があれば説明下さい。(具体値があれば記載、対応する図/表番号があれば記載)
④メカニズムの解明・なぜそうなるのか等の記載があれば説明下さい。
⑤比較の記載があれば違いを表でまとめて下さい。(対応する図/表番号があれば明記)
⑥上記⑤以外で表に出来そうな部分があれば表でまとめて下さい。(対応する図/表番号があれば記載)
▼生成AIの回答(ChatGPT-4o)
①何についての記載か? + 要旨は何? + 対応する図/表番号を列挙
- 何についての記載か: YOLOv3の開発過程で試みたがうまくいかなかった手法についての記載である。
-
要旨:
- アンカーボックスのx, yオフセット予測の失敗。
- 線形活性化関数を使用したx, y予測の失敗。
- フォーカルロスの試用とその失敗。
- 二重IOUしきい値を用いた真値割り当ての失敗。
- これらの手法がうまくいかなかったが、現在の方法が少なくとも局所的最適解である可能性がある。
- 対応する図/表番号: 無し
②改良点・工夫点・テクニック等の記載
- アンカーボックスのx, yオフセット予測: 通常のアンカーボックス予測メカニズムを使用したが、モデルの安定性が低下し、うまく機能しなかった。
- 線形x, y予測: x, yオフセットをロジスティック活性化の代わりに線形活性化で予測しようとしたが、mAPが数ポイント低下した。
- フォーカルロス: フォーカルロスを試用したが、mAPが約2ポイント低下した。YOLOv3は既にフォーカルロスが解決しようとする問題に対して十分にロバストである可能性がある。
- 二重IOUしきい値と真値割り当て: Faster R-CNNのように二重IOUしきい値を使用しようとしたが、良い結果が得られなかった。
③性能が向上した記載
性能が向上した記載は無し。むしろ、試みた手法が性能を低下させた結果が示されている。
④メカニズムの解明・なぜそうなるのか等の記載
- フォーカルロスの失敗: YOLOv3がフォーカルロスの導入によってmAPが低下した原因については、YOLOv3が既に別の方法でその問題に対応しているためかもしれないと推測されているが、明確な理由は不明である。
⑤比較の記載
各手法の失敗によるmAPの低下について、以下の表でまとめる。
| 試みた手法 | 結果 | mAPの変化量 | 理由 |
|---|---|---|---|
| アンカーボックスのx, yオフセット予測 | モデルの安定性が低下し、うまく機能しなかった | 不明 | モデル安定性の低下 |
| 線形x, y予測 | mAPが数ポイント低下 | 数ポイント低下 | 線形活性化による予測の不適合 |
| フォーカルロス | mAPが約2ポイント低下 | 約2ポイント低下 | フォーカルロスがYOLOv3に適合しない |
| 二重IOUしきい値と真値割り当て | 良い結果が得られなかった | 不明 | しきい値の選定が不適合だった可能性 |
⑥上記⑤以外で表に出来そうな部分
上記⑤の表で必要な情報は網羅されているため、他に表にまとめる必要は無し。
5. What This All Means
▼質問(人間)
質問内容全体はここをクリック
(論文・記事の各章節を貼り付け) 5. What This All Means YOLOv3 is a good detector. It’s fast, it’s accurate. It’s not as great on the COCO average AP between .5 and .95 IOU metric. But it’s very good on the old detection metric of .5 IOU. Why did we switch metrics anyway? The original COCO paper just has this cryptic sentence: “A full discus- sion of evaluation metrics will be added once the evaluation server is complete”. Russakovsky et al report that that hu- mans have a hard time distinguishing an IOU of .3 from .5! “Training humans to visually inspect a bounding box with IOU of 0.3 and distinguish it from one with IOU 0.5 is sur- prisingly difficult.” [18] If humans have a hard time telling the difference, how much does it matter? But maybe a better question is: “What are we going to do with these detectors now that we have them?” A lot of the people doing this research are at Google and Facebook. I guess at least we know the technology is in good hands and definitely won’t be used to harvest your personal infor- mation and sell it to.... wait, you’re saying that’s exactly what it will be used for?? Oh. Well the other people heavily funding vision research are the military and they’ve never done anything horrible like killing lots of people with new technology oh wait.....1 I have a lot of hope that most of the people using com- puter vision are just doing happy, good stuff with it, like counting the number of zebras in a national park [13], or tracking their cat as it wanders around their house [19]. But computer vision is already being put to questionable use and as researchers we have a responsibility to at least consider the harm our work might be doing and think of ways to mit- igate it. We owe the world that much. In closing, do not @ me. (Because I finally quit Twitter).上記の内容に関して下記の質問に回答下さい: (である調で記載、質問に対して該当するものが無ければ無しと記載、対応する図/表番号があれば記載)
①何についての記載か? + 要旨は何? + 対応する図/表番号を列挙 (要旨は箇条書きで記載、図/表番号は横1列で羅列)
②改良点・工夫点・テクニック等の記載があれば説明下さい。
③性能が向上した記載があれば説明下さい。(具体値があれば記載、対応する図/表番号があれば記載)
④メカニズムの解明・なぜそうなるのか等の記載があれば説明下さい。
⑤比較の記載があれば違いを表でまとめて下さい。(対応する図/表番号があれば明記)
⑥上記⑤以外で表に出来そうな部分があれば表でまとめて下さい。(対応する図/表番号があれば記載)
▼生成AIの回答(ChatGPT-4o)
①何についての記載か? + 要旨は何? + 対応する図/表番号を列挙
- 何についての記載か: YOLOv3の性能評価と、それに伴う評価基準の意義についての記載である。また、コンピュータビジョン技術の社会的影響についての考察も含まれている。
-
要旨:
- YOLOv3は優れた検出器であり、特に旧来のIOU=0.5の評価基準において非常に優れている。
- COCOの新しい平均AP基準では他のモデルに劣るが、旧評価基準においては強力である。
- コンピュータビジョン技術の社会的影響と研究者の責任についても考察されている。
- 対応する図/表番号: 無し
②改良点・工夫点・テクニック等の記載
- 無し
③性能が向上した記載
- 性能向上: YOLOv3が旧来の評価基準(IOU=0.5)において非常に高い性能を示していると述べられているが、具体的な数値や性能向上の詳細は記載されていない。
④メカニズムの解明・なぜそうなるのか等の記載
- 評価基準に対する疑問: COCOの平均AP基準の導入理由に対する疑問が述べられており、特に人間がIOU=0.3と0.5の違いを視覚的に区別するのが難しいという報告が引用されている。
⑤比較の記載
- 無し
⑥上記⑤以外で表に出来そうな部分
- 表にできそうな部分は無し。
Rebuttal
▼質問(人間)
質問内容全体はここをクリック
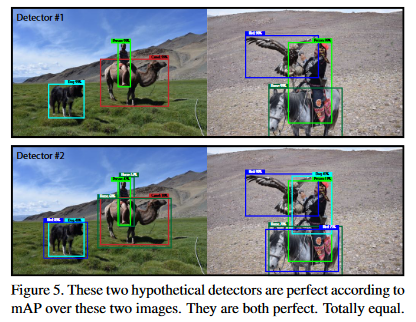
(論文・記事の各章節を貼り付け) Rebuttal We would like to thank the Reddit commenters, labmates, emailers, and passing shouts in the hallway for their lovely, heart- felt words. If you, like me, are reviewing for ICCV then we know you probably have 37 other papers you could be reading that you’ll invariably put off until the last week and then have some legend in the field email you about how you really should finish those re- views execept it won’t entirely be clear what they’re saying and maybe they’re from the future? Anyway, this paper won’t have be- come what it will in time be without all the work your past selves will have done also in the past but only a little bit further forward, not like all the way until now forward. And if you tweeted about it I wouldn’t know. Just sayin. Reviewer #2 AKA Dan Grossman (lol blinding who does that) insists that I point out here that our graphs have not one but two non-zero origins. You’re absolutely right Dan, that’s because it looks way better than admitting to ourselves that we’re all just here battling over 2-3% mAP. But here are the requested graphs. I threw in one with FPS too because we look just like super good when we plot on FPS. Reviewer #4 AKA JudasAdventus on Reddit writes “Entertain- ing read but the arguments against the MSCOCO metrics seem a bit weak”. Well, I always knew you would be the one to turn on me Judas. You know how when you work on a project and it only comes out alright so you have to figure out some way to justify how what you did actually was pretty cool? I was basically trying to do that and I lashed out at the COCO metrics a little bit. But now that I’ve staked out this hill I may as well die on it. See here’s the thing, mAP is already sort of broken so an up- date to it should maybe address some of the issues with it or at least justify why the updated version is better in some way. And that’s the big thing I took issue with was the lack of justification. For PASCAL VOC, the IOU threshold was ”set deliberately low to ac- count for inaccuracies in bounding boxes in the ground truth data“ [2]. Does COCO have better labelling than VOC? This is defi- nitely possible since COCO has segmentation masks maybe the labels are more trustworthy and thus we aren’t as worried about inaccuracy. But again, my problem was the lack of justification. The COCO metric emphasizes better bounding boxes but that emphasis must mean it de-emphasizes something else, in this case classification accuracy. Is there a good reason to think that more precise bounding boxes are more important than better classifi- cation? A miss-classified example is much more obvious than a bounding box that is slightly shifted. mAP is already screwed up because all that matters is per-class rank ordering. For example, if your test set only has these two images then according to mAP two detectors that produce these results are JUST AS GOOD:Figure 5. These two hypothetical detectors are perfect according to
mAP over these two images. They are both perfect. Totally equal.
Now this is OBVIOUSLY an over-exaggeration of the prob-
lems with mAP but I guess my newly retconned point is that there
are such obvious discrepancies between what people in the “real
world” would care about and our current metrics that I think if
we’re going to come up with new metrics we should focus on
these discrepancies. Also, like, it’s already mean average preci-
sion, what do we even call the COCO metric, average mean aver-
age precision?
Here’s a proposal, what people actually care about is given an
image and a detector, how well will the detector find and classify
objects in the image. What about getting rid of the per-class AP
and just doing a global average precision? Or doing an AP calcu-
lation per-image and averaging over that?
Boxes are stupid anyway though, I’m probably a true believer
in masks except I can’t get YOLO to learn them.
上記の内容に関して下記の質問に回答下さい: (である調で記載、質問に対して該当するものが無ければ無しと記載、対応する図/表番号があれば記載)
①何についての記載か? + 要旨は何? + 対応する図/表番号を列挙 (要旨は箇条書きで記載、図/表番号は横1列で羅列)
②改良点・工夫点・テクニック等の記載があれば説明下さい。
③性能が向上した記載があれば説明下さい。(具体値があれば記載、対応する図/表番号があれば記載)
④メカニズムの解明・なぜそうなるのか等の記載があれば説明下さい。
⑤比較の記載があれば違いを表でまとめて下さい。(対応する図/表番号があれば明記)
⑥上記⑤以外で表に出来そうな部分があれば表でまとめて下さい。(対応する図/表番号があれば記載)
▼生成AIの回答(ChatGPT-4o)
①何についての記載か? + 要旨は何? + 対応する図/表番号を列挙
- 何についての記載か: この節は、YOLOv3の性能に対する批評や、評価基準に関する意見、そして評価者からのフィードバックへの応答について記載している。
-
要旨:
- 論文の評価者やオンラインコミュニティからのフィードバックに対する感謝と、それに対する応答。
- COCOの新しい評価指標に対する批判と、その指標の欠陥に対する意見。
- mAP(平均適合率)指標の問題点についての議論と、代替案の提案。
- 対応する図/表番号: Figure 5
②改良点・工夫点・テクニック等の記載
- 改良点・工夫点: 改良点やテクニックについての記載は無い。ただし、評価指標に対する批判とその代替案が提案されている。
③性能が向上した記載
- 性能向上: 性能向上に関する記載は無い。主に評価指標の妥当性に対する批判が述べられている。
④メカニズムの解明・なぜそうなるのか等の記載
- メカニズムの解明: COCO評価指標に対する批判の中で、PASCAL VOCではIOU閾値が「誤差を考慮して低く設定されている」との記載があり、COCOの指標がより正確なバウンディングボックスを強調する理由が不明であるとされている。また、mAP指標の問題点として、クラスごとのランク付けにしか関心がない点が挙げられている。
⑤比較の記載
- 比較の記載: 無し
⑥上記⑤以外で表に出来そうな部分
- 表にできそうな部分は無し。
▼質問(人間)
評価指標の妥当性に対する批判について、もっと説明下さい。
▼生成AIの回答(ChatGPT-4o mini)
評価指標の妥当性に対する批判は、以下のような点に集中しています:
-
COCOの評価指標への批判:
- 評価基準の変遷: 元々のCOCOの評価指標(平均適合率、mAP)は、IOU(Intersection over Union)の範囲を0.5から0.95まで広げたもので、細かいバウンディングボックスの精度に重きを置いています。著者は、これが実際のアプリケーションにおいて人間の視覚的評価と一致しない可能性があると指摘しています。特に、人間が0.3と0.5のIOUの違いを認識するのが難しいため、評価指標が実用的でない可能性があるとしています。
-
mAPの問題点:
- クラスごとの適合率: mAPはクラスごとの適合率を平均する指標であり、クラスごとの正確さを重視します。しかし、著者は、mAPがクラスごとのランク付けにしか関心がないため、より重要な要素が見落とされる可能性があると主張しています。たとえば、バウンディングボックスが正確でない場合でも、クラスの分類精度が高ければ良いとされることがあるため、全体の性能を正確に評価できない可能性があるとしています。
-
評価指標の選定基準:
- 評価指標の改善提案: 著者は、より現実的な評価指標として、画像ごとのAP(適合率)を計算し、それを平均する方法を提案しています。これにより、全体の性能がより正確に評価できる可能性があるとしています。また、バウンディングボックスだけでなく、オブジェクトの分類精度も重視すべきだと述べています。
-
mAPの過剰な依存:
- 過度な重視: mAPが全体のパフォーマンス指標として過度に依存されると、実際のアプリケーションでの有用性が損なわれる可能性があるとしています。特に、mAPの計算方法が必ずしも現実のシナリオでの精度を反映していない場合、指標の有効性が疑問視されるとしています。
これらの批判は、評価指標が研究やアプリケーションの実用性にどのように影響を与えるかについての深い考察を促し、より現実的で実用的な評価方法の開発を提案するものです。
あとがき
所感
機械学習についてある程度知っていないと、生成AIに質問しても、その回答内容だけでは理解できないと思います。生成AIの回答は、論文の内容をあまり変えずに、要点をそのまま掻い摘んで回答するような形になっています。(良い意味で論文の要点をそのまま抜き出した形)
YOLOについての分かりやすい解説記事等を事前にチェックして、実際の処理方法や中核部分の内容をあらかじめ把握していると、理解しやすいと思います。生成AIは実際の細かい処理方法自体を分かりやすく説明してはくれない傾向があります。
分かったこと
YOLOv3は、3つの異なるスケールでバウンディングボックスを予測し(Feature Pyramid Networks (FPN)の考え方に似た手法を用いて特徴を抽出)、2層前の特徴マップを2倍にアップサンプリングしてネットワークの初期段階からの別の特徴マップと結合。この方法により、アップサンプリングされた特徴からより意味のある意味情報を取得し、初期の特徴マップからはより細かな情報を得ることが分かりました。
その他で、分かったこと・注目した点を列挙すると:
k-meansクラスタリング:
バウンディングボックスの事前定義: 事前に画像データセット内のバウンディングボックスのサイズをクラスタリングし、各クラスタの中心値をバウンディングボックスの初期値として使用。これにより、学習の初期段階からより良い予測が可能になる。事前にバウンディングボックスのサイズを決定することで、学習を効率化できる。
YOLOv3は、3つの異なるスケールでバウンディングボックスを予測する。このシステムは、Feature Pyramid Networks (FPN)の考え方に似た手法を用いて、特徴を抽出する。
2層前の特徴マップを2倍にアップサンプリングし、ネットワークの初期段階からの別の特徴マップと結合する。この方法により、アップサンプリングされた特徴からより意味のある意味情報を取得し、初期の特徴マップからはより細かな情報を得ることができる。
各ボックスは、そのバウンディングボックスが含む可能性のあるクラスをマルチラベル分類を用いて予測する。各クラスに対して独立したロジスティック回帰分類器を用いる。
ソフトマックスを用いると、各ボックスが1つのクラスのみを持つという前提を課してしまうため、しばしば正しいデータのモデリングができなくなる。
Darknet-19とResNetのハイブリッドアプローチである新しい特徴抽出ネットワークDarknet-53を導入。ResNetのようにショートカット接続を使用することで、深いネットワークの効果的な学習を実現している。
YOLOv3は、マルチスケール予測により小さなオブジェクトに対して高い検出性能を示しているが、中型および大型オブジェクトに対する性能が相対的に低くなっている。
末尾に下記の内容が書かれてある:
論文の評価者やオンラインコミュニティからのフィードバックに対する感謝と、それに対する応答。
COCOの新しい評価指標に対する批判と、その指標の欠陥に対する意見。(COCOの指標がより正確なバウンディングボックスを強調する理由が不明である)
mAP(平均適合率)指標の問題点についての議論と、代替案の提案。
COCOの評価指標(平均適合率、mAP)は、IOU(Intersection over Union)の範囲を0.5から0.95まで広げたもので、細かいバウンディングボックスの精度に重きを置いているが、著者は、これが実際のアプリケーションにおいて人間の視覚的評価と一致しない可能性があると指摘。特に、人間が0.3と0.5のIOUの違いを認識するのが難しいため、評価指標が実用的でない可能性があるとしている。