今回はPytorchで最小二乗法を用いた簡易的なRANSACを実装します.Pytorchではミニバッチを前提とした演算が可能なため,最小二乗フィッティングを用いたRANSACはfor文を用いない実装ができます.しかし計算途中のデータをメモリにのせる必要があるので,場合によっては現実的ではないかもしれません.とはいえループを減らすのに役立つと思います.また,並列に行うためアウトライヤを除くことができません,つまり厳密にはRANSACではないかもしれません.
import numpy as np
import matplotlib.pyplot as plt
import torch
最小二乗法
まずnumpyで実装し,次にpytorchで二つの最小二乗解を並列に求めたいと思います.
numpy
まずは,データの作成を行います.
x = np.arange(0,1,0.01)
a = 2.0
b = 3.0 # このbは距離計算や式におけるcであることに注意
def func(x):
return a*x+b
y = func(x) + 0.1*np.random.randn(len(x))
fig, ax = plt.subplots()
ax.scatter(x,y)
<matplotlib.collections.PathCollection at 0x1e86ae05f48>
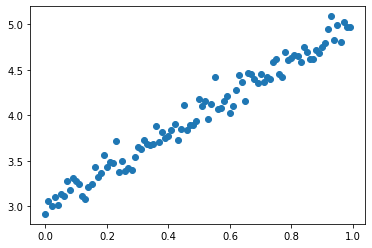
グラフからも分かりますが,$y = ax + c$ $(a=2, c=3)$のデータにノイズが混ざったデータです.
次に,numpyの行列演算で最小二乗解を求めます.
# 計画行列
X = np.stack([x,np.ones(len(x))],axis=1)
# 最小二乗解
inv_XtX = np.linalg.inv(np.dot(X.T,X))
Xty = np.dot(X.T,y)
beta_hat = np.dot(inv_XtX, Xty)
print(beta_hat)
[2.00013207 3.01041776]
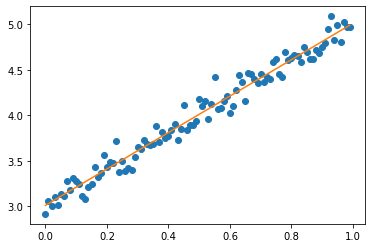
最小二乗解をグラフで表示させます.
y_hat = np.dot(X, beta_hat)
fig, ax = plt.subplots()
ax.scatter(x,y)
ax.plot(x,y_hat,color="C1")
[<matplotlib.lines.Line2D at 0x1e86b302f88>]
Pytorch
pytorchではバッチごとに行列の積torch.bmm,逆行列torch.inverse,転置torch.transposeが計算できるので,複数データを並列に最小二乗解を計算できます.
まずは,データの作成を行います.
x_1 = torch.from_numpy(np.arange(0,1,0.01))
x_2 = torch.from_numpy(np.arange(2,3,0.01))
b_x = torch.stack([x_1,x_2],dim=0)
a_1 = 2.0
b_1 = 3.0 # このbは距離計算や式におけるcであることに注意
a_2 = 4.0
b_2 = 5.0 # このbは距離計算や式におけるcであることに注意
def func1(x):
return a_1*x+b_1
def func2(x):
return a_2*x+b_2
y_1 = func1(x_1) + 0.1*torch.randn(len(x_1))
y_2 = func2(x_2) + 0.1*torch.randn(len(x_2))
b_y = torch.stack([y_1,y_2],dim=0)
fig, ax = plt.subplots(figsize=(10,10))
ax.scatter(x_1.numpy(), y_1.numpy(), color="C0")
ax.scatter(x_2.numpy(), y_2.numpy(), color="C1")
<matplotlib.collections.PathCollection at 0x1e86b380048>
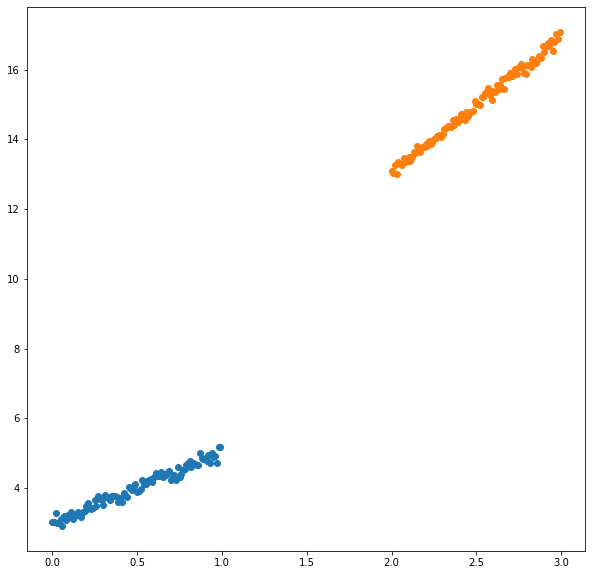
$(a=2, c=3)$と$(a=4, c=5)$にそれぞれノイズがかかったデータです.
Pytorchで並列に最小二乗解を求めます.ここで注意しなければならないのはtorch.bmmは二つのバッチの行列が必要になるので,ベクトルは明示的に行列に変換します.
# 計画行列
ones = torch.ones_like(b_x)
b_X = torch.stack([b_x, ones],dim=2)
# 最小二乗解
b_XtX = torch.bmm(b_X.transpose(1,2),b_X)
b_inv_XtX = torch.inverse(b_XtX)
b_Xty = torch.bmm(b_X.transpose(1,2),b_y[:,:,None])
b_beta_hat = torch.bmm(b_inv_XtX, b_Xty) # (batch,2,1) であることに注意
print(b_beta_hat)
tensor([[[2.0427],
[3.0002]],
[[3.8828],
[5.2894]]], dtype=torch.float64)
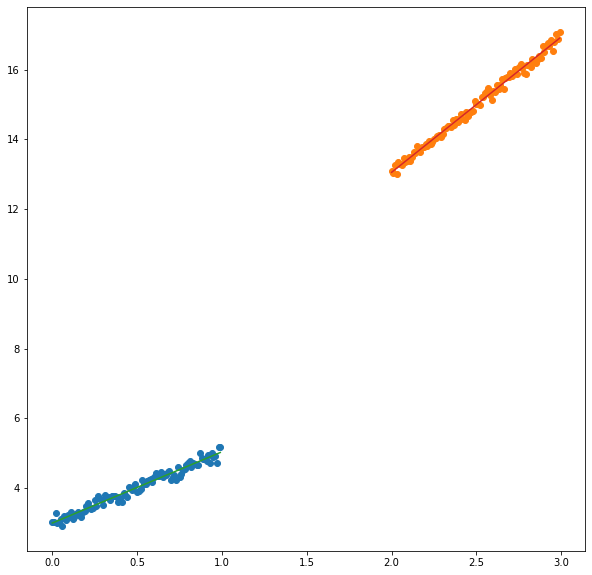
最小二乗解をグラフで表示させます.
b_y_hat = torch.bmm(b_X, b_beta_hat)
fig, ax = plt.subplots(figsize=(10,10))
ax.scatter(x_1.numpy(), y_1.numpy(), color="C0")
ax.scatter(x_2.numpy(), y_2.numpy(), color="C1")
ax.plot(x_1.numpy(), b_y_hat[0,:,:].squeeze(dim=1).numpy(),color="C2")
ax.plot(x_2.numpy(), b_y_hat[1,:,:].squeeze(dim=1).numpy(),color="C3")
[<matplotlib.lines.Line2D at 0x1e86b5e1e88>]
RANSAC
以上の計算を用いて,2次元の直線検出のRANSACを試してみます.手順としては
- すべての$n$個の点から,$s$点×$m$をサンプリングして$m$個それぞれの最小二乗解(直線)を求める.
- 各直線について,すべての点との距離を計算し,閾値以内に収まる点の数を求める.
- 最も閾値以内に収まる点の多い直線を結果とする.
まずnumpyとfor文で実装してからpytorchで実装してみます.
データの作成
($a=2, c=3$)のデータにまとまったノイズが乗ってしまったようなデータとします.
a_1 = 2.0
b_1 = 3.0
a_2 = 2.0
b_2 = 4.0
def func1(x):
return a_1*x+b_1
def func2(x):
return a_2*x+b_2
x_1 = np.arange(0,1,0.01)
x_2 = np.arange(0.8,1,0.005)
all_x = np.concatenate([x_1,x_2],axis=0)
y_1 = func1(x_1) + 0.1*np.random.randn(len(x_1))
y_2 = func2(x_2) + 0.2*np.random.randn(len(x_2))
all_y = np.concatenate([y_1,y_2],axis=0)
fig, ax = plt.subplots(figsize=(10,10))
ax.scatter(all_x, all_y, color="C0")
<matplotlib.collections.PathCollection at 0x1e86b5ffc88>
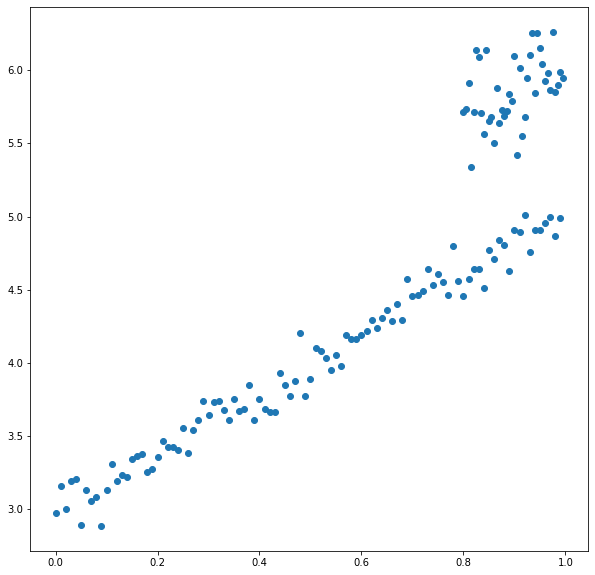
print("all_x length:",len(all_x))
all_x length: 140
サンプリング
直線の本数($m$)×一本の推定に利用する点数($s$) の分だけデータをサンプリングする必要があります.
line_number = 20 # m
point_number = 5 # s
distance_th = 0.1 # 距離の閾値
非復元抽出としてすべての$m$本の直線で重複の無いサンプリングを行います.しかしlinenumber($m$)×point_number($s$)の数データよりデータ数が大きい必要があります.
numpy.random.permutationはrangeの値をランダムに並べ替えたndarrayを返す関数です.
random_index_flatten = np.random.permutation(len(all_x))[:line_number*point_number]
random_index = random_index_flatten.reshape(line_number, point_number)
# random_index
numpy
for文で回しながら,RANSACを計算します.距離の計算は点と直線の距離の公式を用いています.
distance_vote_list = []
solution_list = []
solution_points_list = [] # おまけ
for points_index in random_index:
# 利用するデータ
x = all_x[points_index]
y = all_y[points_index]
# 計画行列
X = np.stack([x,np.ones(len(x))],axis=1)
# 最小二乗解
inv_XtX = np.linalg.inv(np.dot(X.T,X))
Xty = np.dot(X.T,y)
beta_hat = np.dot(inv_XtX, Xty)
# 距離の計算
a = beta_hat[0]
b = - 1
c = beta_hat[1]
d_num = a * all_x + b * all_y + c # (all_point_number(n))
d_den = np.sqrt(a**2+b**2) # 1
d = np.abs(d_num) / d_den # (all_point_number(n))
# 投票
vote_number = (d < distance_th).sum()
distance_vote_list.append(vote_number)
solution_list.append(beta_hat)
solution_points_list.append(np.stack([x,y],axis=1))
solution_array = np.stack(solution_list, axis=0)
distance_vote_array = np.array(distance_vote_list)
ransac_solution_index = np.argmax(distance_vote_array,axis=0)
ransac_solution = solution_array[ransac_solution_index]
print("ransac solution:",ransac_solution)
ransac_solution_points = solution_points_list[ransac_solution_index]
ransac solution: [2.08543647 2.92102793]
print(distance_vote_array)
[68 79 78 98 91 65 70 61 67 70 58 67 71 72 61 85 75 84 72 76]
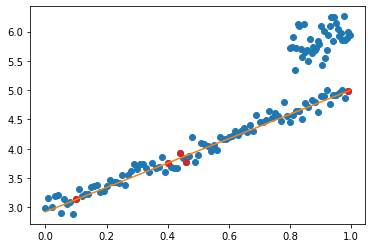
RANSACの計算結果をグラフで表示させます.赤い点は解を求めるのに利用した点です.
all_X = np.stack([all_x,np.ones(len(all_x))],axis=1)
ransac_y_hat = np.dot(all_X, ransac_solution)
fig,ax = plt.subplots()
ax.plot(all_x, ransac_y_hat, color="C1")
ax.scatter(all_x, all_y, color="C0")
ax.scatter(ransac_solution_points[:,0],ransac_solution_points[:,1],color="C3")
<matplotlib.collections.PathCollection at 0x1e86b771e88>
pytorch
ミニバッチとして並列にRANSACを計算します.
all_x_tensor = torch.from_numpy(all_x) # (all_point_number(n))
all_y_tensor = torch.from_numpy(all_y) # (all_point_number(n))
b_x = torch.from_numpy(all_x[random_index]) # (line_number(m), point_number(s))
b_y = torch.from_numpy(all_y[random_index]) # (line_number(m), point_number(s))
# 計画行列
ones = torch.ones_like(b_x)
b_X = torch.stack([b_x, ones],dim=2)
# 最小二乗解
b_XtX = torch.bmm(b_X.transpose(1,2),b_X)
b_inv_XtX = torch.inverse(b_XtX)
b_Xty = torch.bmm(b_X.transpose(1,2),b_y[:,:,None])
b_beta_hat = torch.bmm(b_inv_XtX, b_Xty) # (batch,2,1) であることに注意
b_beta_hat_squeezed = b_beta_hat.squeeze(2) # (batch,2)
# 距離の計算
a = b_beta_hat_squeezed[:,0] # (line_number(m))
c = b_beta_hat_squeezed[:,1] # (line_number(m))
d_num = a[:,None] * all_x_tensor[None,:] - all_y_tensor[None,:] + c[:,None] # (line_number(m), all_point_number(n))
d_den = torch.sqrt(a**2+(-1)**2) # (line_number(m))
d = torch.abs(d_num) / d_den[:,None]
# 投票
b_vote_number = (d < distance_th).sum(dim=1) # (line_number(m))
ransac_solution_index = np.argmax(b_vote_number.numpy(),axis=0) # 正確な比較のためにnumpyで計算
ransac_solution = b_beta_hat_squeezed[ransac_solution_index].numpy()
print("ransac solution:", ransac_solution)
solution_points = torch.stack([b_x[ransac_solution_index,:],b_y[ransac_solution_index,:]],dim=1)
ransac solution: [2.08543647 2.92102793]
ここで注意しなければならないのは距離の計算でブロードキャストを用いていることです.
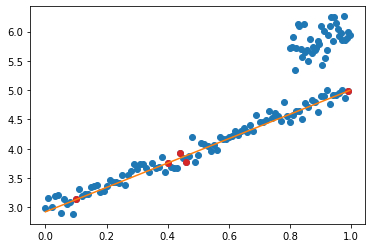
RANSACの計算結果をグラフで表示させます.
all_X = np.stack([all_x,np.ones(len(all_x))],axis=1)
ransac_y_hat = np.dot(all_X, ransac_solution)
fig,ax = plt.subplots()
ax.plot(all_x, ransac_y_hat, color="C1")
ax.scatter(all_x, all_y, color="C0")
ax.scatter(solution_points[:,0].numpy(),solution_points[:,1].numpy(),color="C3")
<matplotlib.collections.PathCollection at 0x1e86b7afd48>
おまけ(全ての点を利用した最小二乗法)
RANSACを用いない場合の計算をしてみます.
# 計画行列
X = np.stack([all_x,np.ones(len(all_x))],axis=1)
# 最小二乗解
inv_XtX = np.linalg.inv(np.dot(X.T,X))
Xty = np.dot(X.T,all_y)
beta_hat = np.dot(inv_XtX, Xty)
print(beta_hat)
[2.96600878 2.71063865]
y_hat = np.dot(X, beta_hat)
fig, ax = plt.subplots()
ax.scatter(all_x,all_y)
ax.plot(all_x,y_hat,color="C1")
[<matplotlib.lines.Line2D at 0x1e86b877e48>]
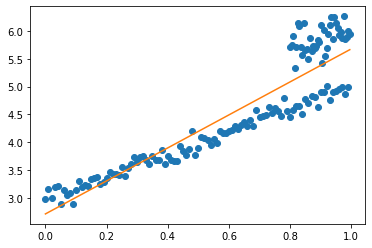
このようにノイズにひっばられてしまいます.
まとめ
- Pytorchを利用してfor文を用いずにRANSACを実装しました.