- こちらの記事はクソアプリカレンダー2021投稿作品です 広い心持ってあくまでもネタとしてお楽しみ下さい
- 本文中に
白い毛が映り込みますが 猫の毛です、あたしの金髪ではありません
1.はじめに
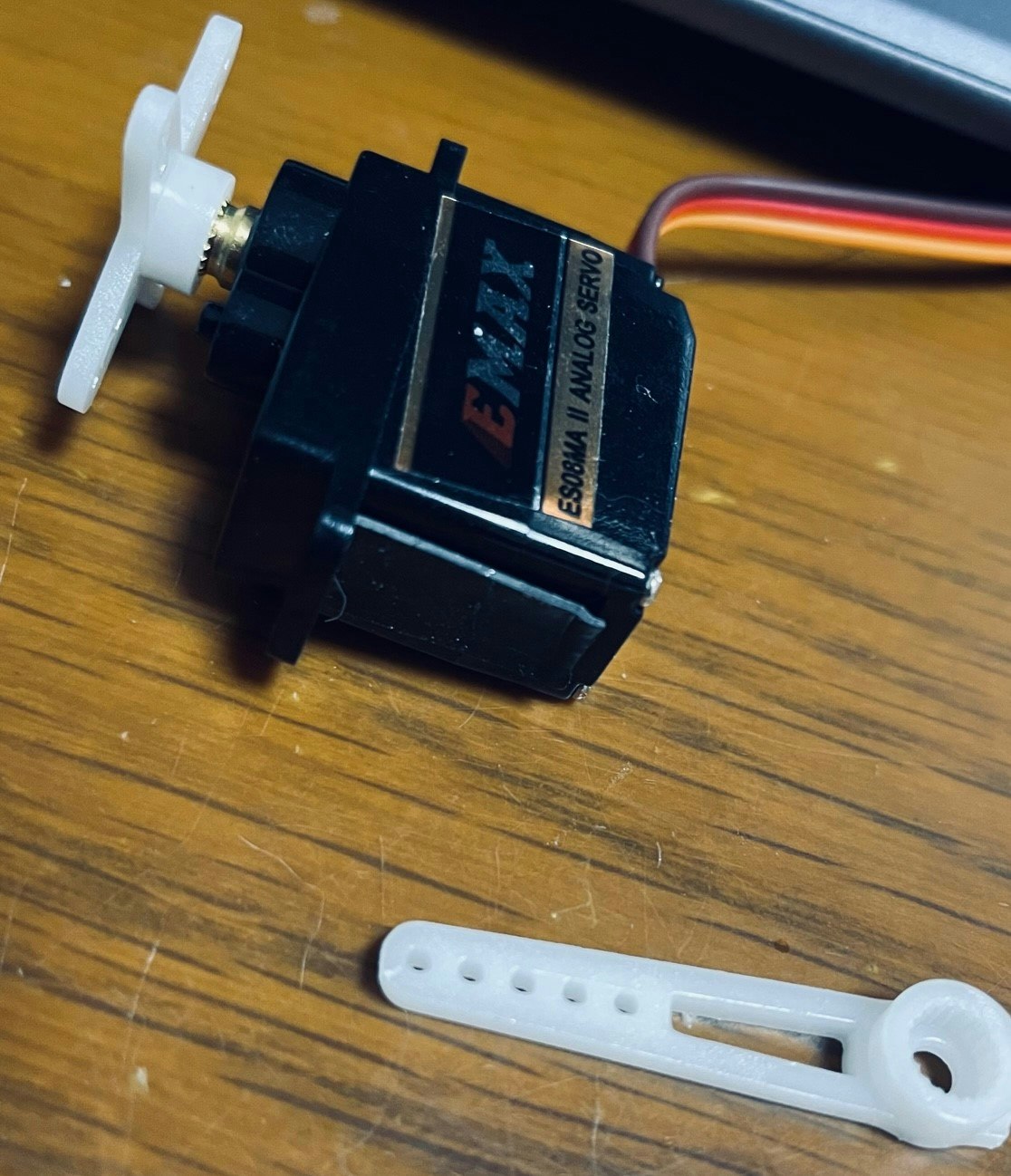
年末の大掃除時にサーボモーターが出てきた
多分 何かの時に購入した部品の一部であるが
あまりにも昔のために型番すら覚えて居ない
ロボットかぁ...懐かしい(謎

昨今では M5Stackで作る手乗りロボット やら
ホログラム投影装置 やら
君がエッチなことを考えるとみんなのブラウザに流れ星が降るChrome拡張 やら
魅せる、楽しむ事に特化したサービスが流行る傾向ではあるが
これらに動じる事なく我が道を行き(いいなぁ こういうの作れる人達って...)
楽しいものを作って行きたいと思う
2. 何をするか?
今回は2日で2足歩行ロボットを作ってみる
ネタ投稿ではあるが話が長くなるので
ハード編、ソフト編の2回の掲載となります
4日あれば4足歩行ロボットも夢では無いのかも
来る年2022クソアプリカレンダがあれば是非参加させて頂きたく
センサ業務で培ったIoT技術と
圧着ピン日に数百本を打つ経験値があれば
2足歩行ロボットなぞ...2日あれば...
3. 構成を考える
色々なサイトを巡ったが
脚関節は片脚2自由度あれば良い動きになるのではとの予想
サーボモータ x 4個
インシュロック x 無限
段ボール x アマゾンのやつ
スズメッキ線 x グランド配線に使うやつ
溶着テープ x 無限
両面テープ x 無限
2.5mmピッチピンヘッダ x 5pin x 2
腰になる箱 x 1
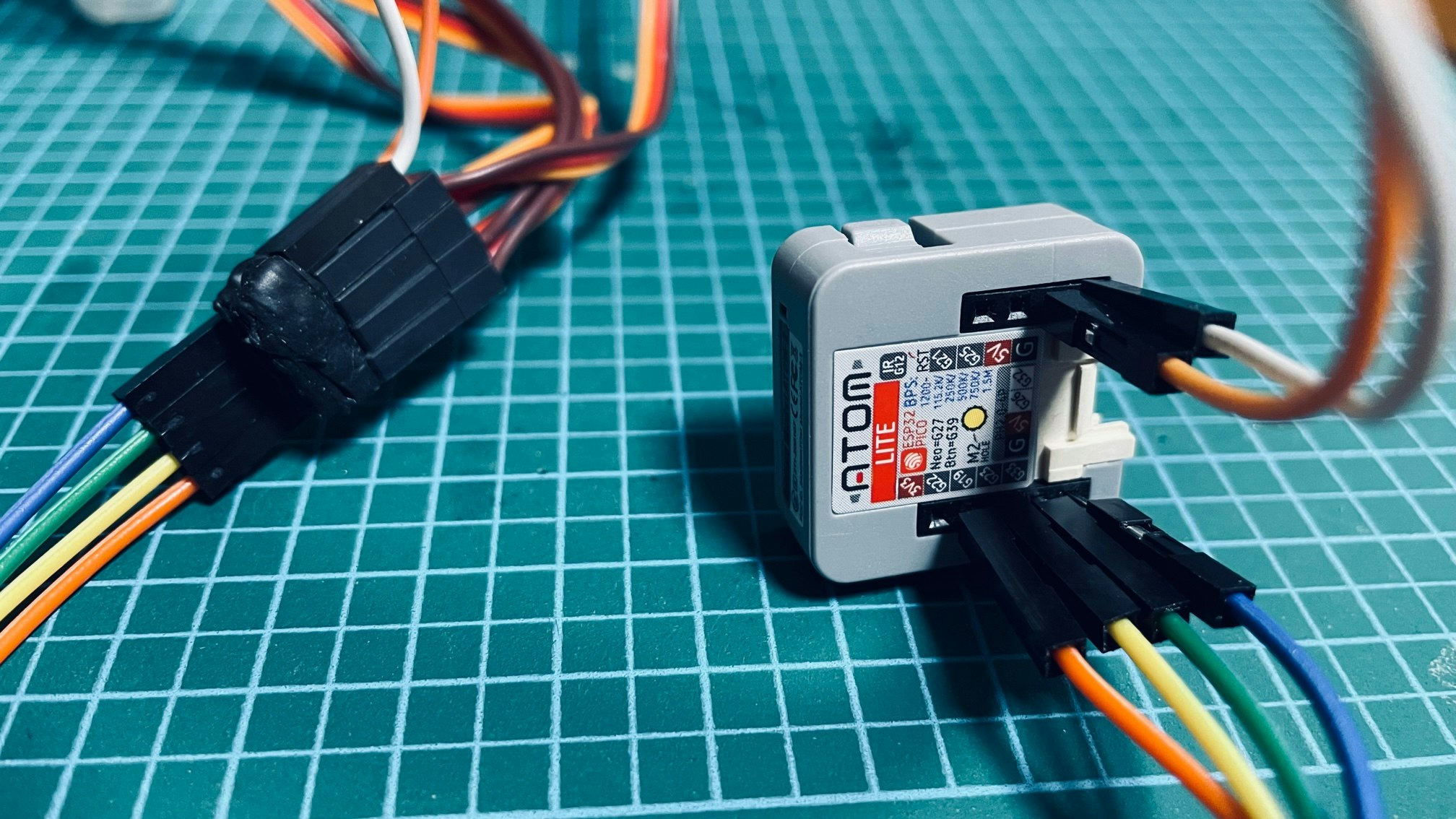
制御CPU x 何かのおまけについて来たM5Atom
サーボモータは ぶっちゃけ今回使った物は良かったんですわ
メタルギアだったんで負荷が高くても良いトルクが出ます
しかも 長いホーンが付いてたんで
まぁ なんでも良っちゃ良いんですけどね
制御は i2c でも spi でもなんでも良いのですが
M5Atomの左側にGPIOが4本並んでいたので つい直結💦
4. さっそく配線関連
センサに特化した業務ばかりやっていますので配線が先になります
- AAはついてませんもちろん
+-+-+-+
|G|V|S|
|N|C|I|
|D|C|G|
+-+-+-+
| | |
これを元に配線を吟味する
GND/VCC/SIGか...
これを4個束にして信号だけ取り出す
ブレッドボードに刺すと場所を食うなぁ
eagle で基板をおこすまでも無いなぁ
タコ足部品つくる?
* 配線しているときに半田はいくら溶けなくっても持っているのはスズメッキ線であり疲れているのではありません
5. タコ足コネクタ
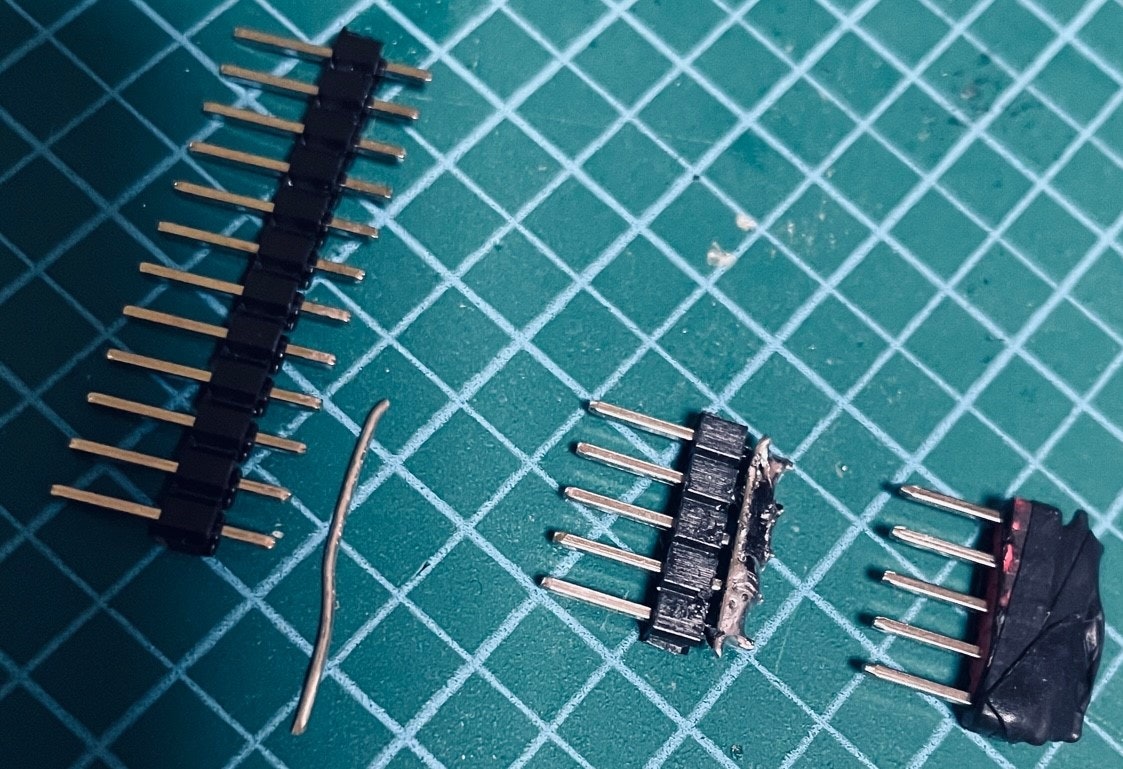
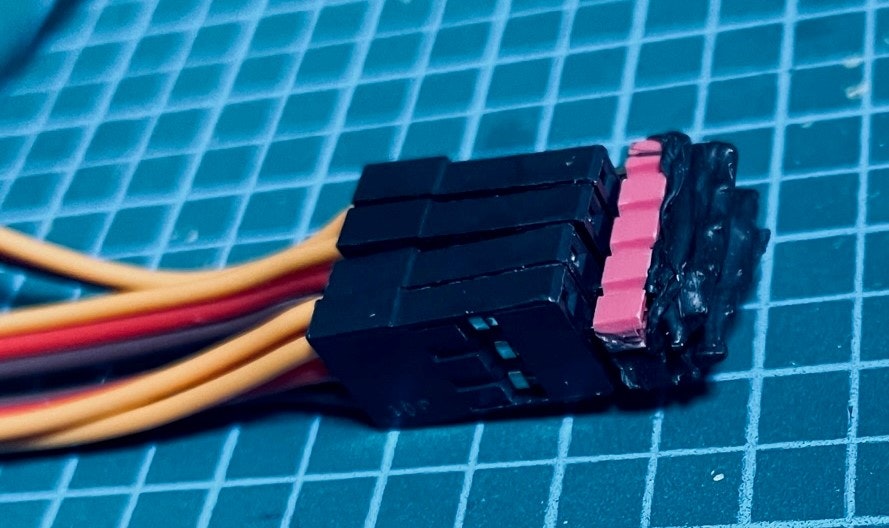
ピンヘッダ5pinをスズメッキ線で繋いで溶着テープを巻く
4ピンはサーボモータ 2ピンはGND/VCCにタコ足するため
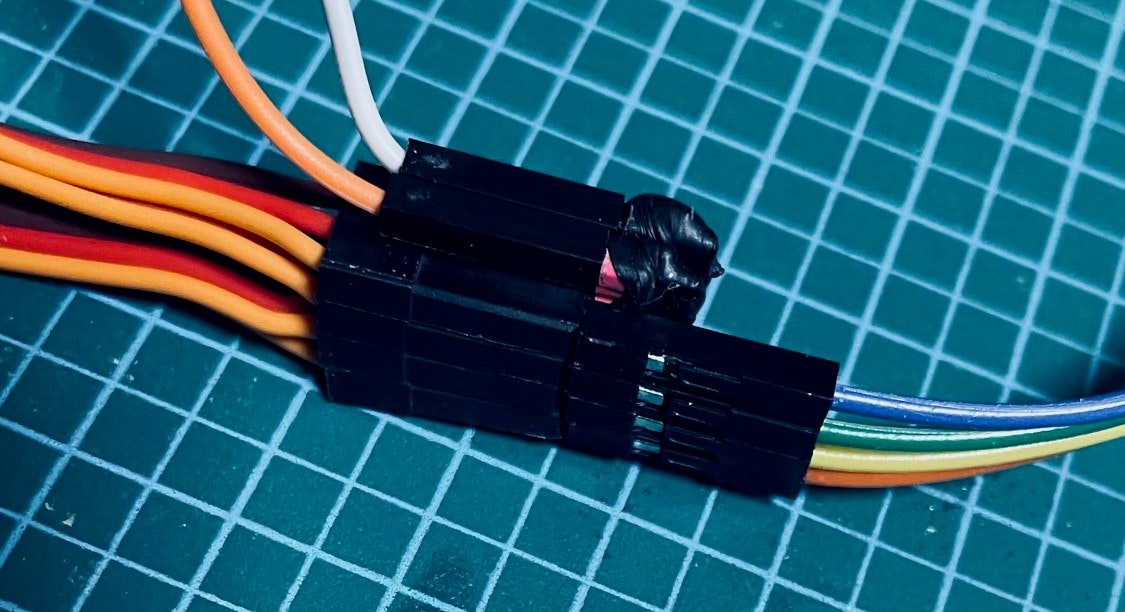
2個作って以下のように素敵に接続
- お父さん、お母さんごめんなさい💦
6. CPU側
裏面向かって左側に うまい具合に4ピンならんでいるので
これは使わせて頂こう
7. サーボのリンク方法を考える (術式:Chrm式サーボ直結)
- あたし失敗しないので!
これは今回かなり悩みました
殆どの方が 構成に3Dプリンタ出力樹脂製固定具や金具固定具等を使っており
2日で作る2足歩行ロボットなぞ まったく眼中にない感じ
測距センサやLidarで室内の3D化という難攻不落(NDAに付き公開不可)な業務をこなした経験はあるので
2軸あればかなりの自由度を持たせる事ができるのは判っています
今回は脚かぁ....
直結!?

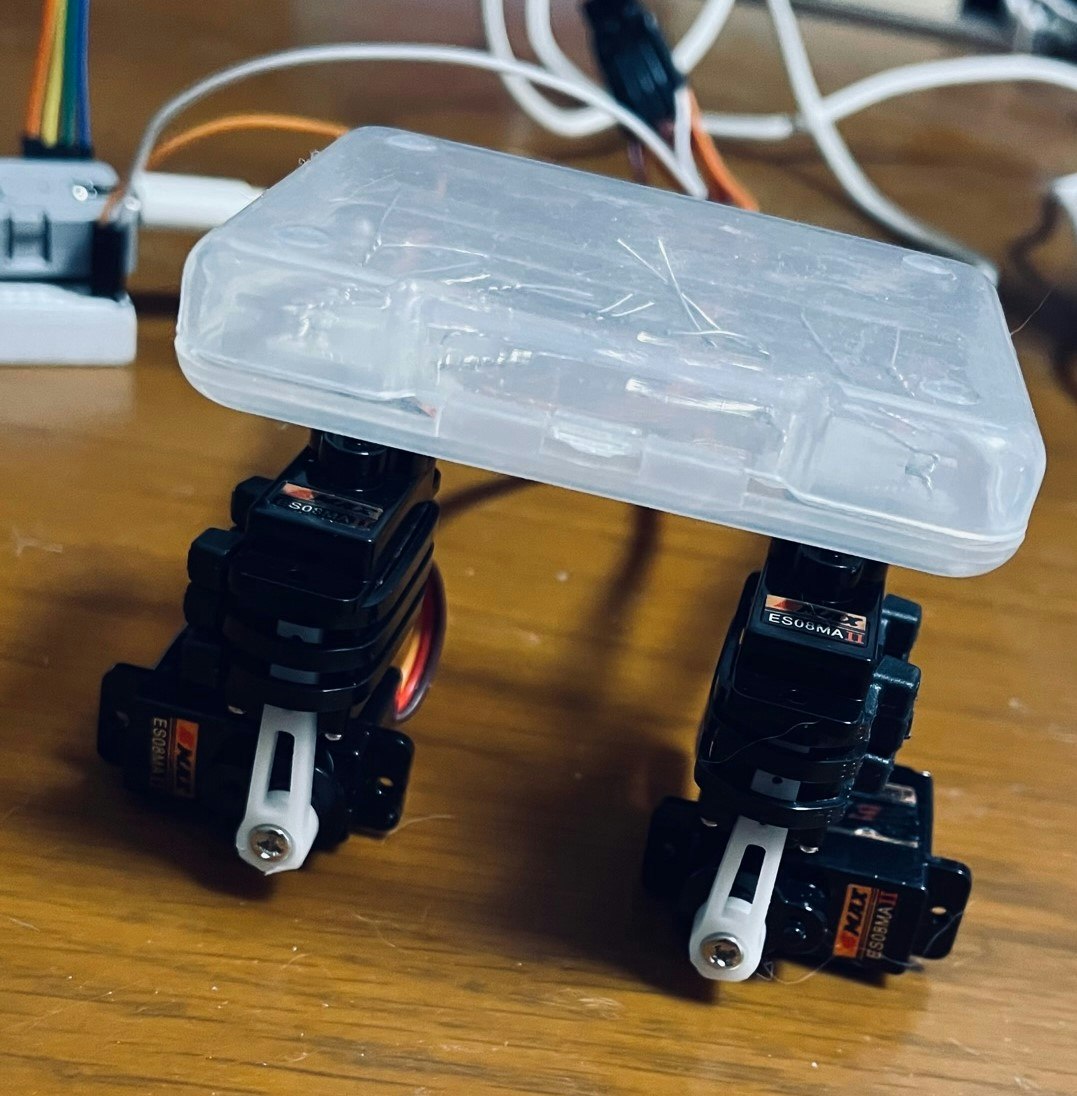
8. サーボ構築
- ここで適当な名前として HIP(腰)サーボ / TOES(つま先)サーボと言う名前で命名しとくと便利です
比較的長いホーンがあったのでニッパで切って片側だけのホーンにします
滑り止めと圧着を兼ねて溶着テープをHIP(腰)サーボに貼り付け
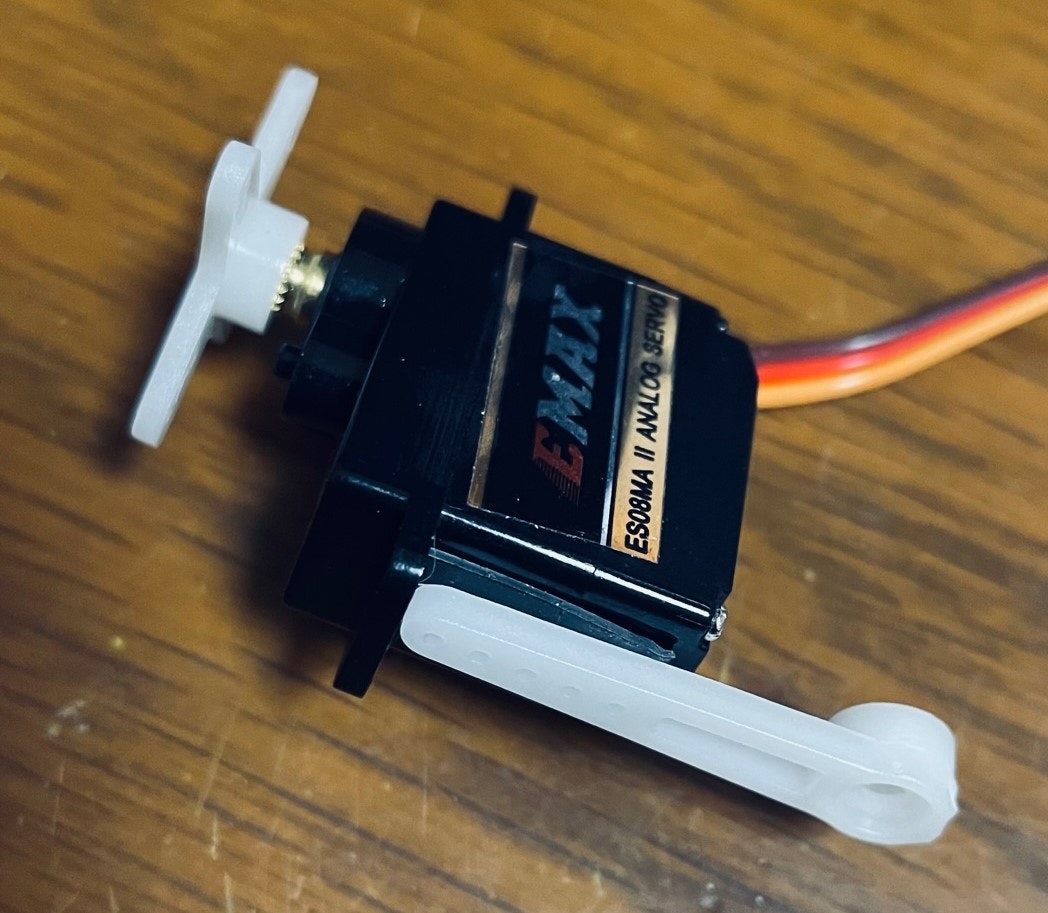
おもむろに無理やり2カ所をインシュロックで固定します
この時ホーンの向きに気を付けないと
インシュロックを大量に失います

各サーボは 0°から180°まで傾きが変わりますので
TOES(つま先)サーボは回転90°の位置でHIP(腰)サーボに直角の位置で固定します
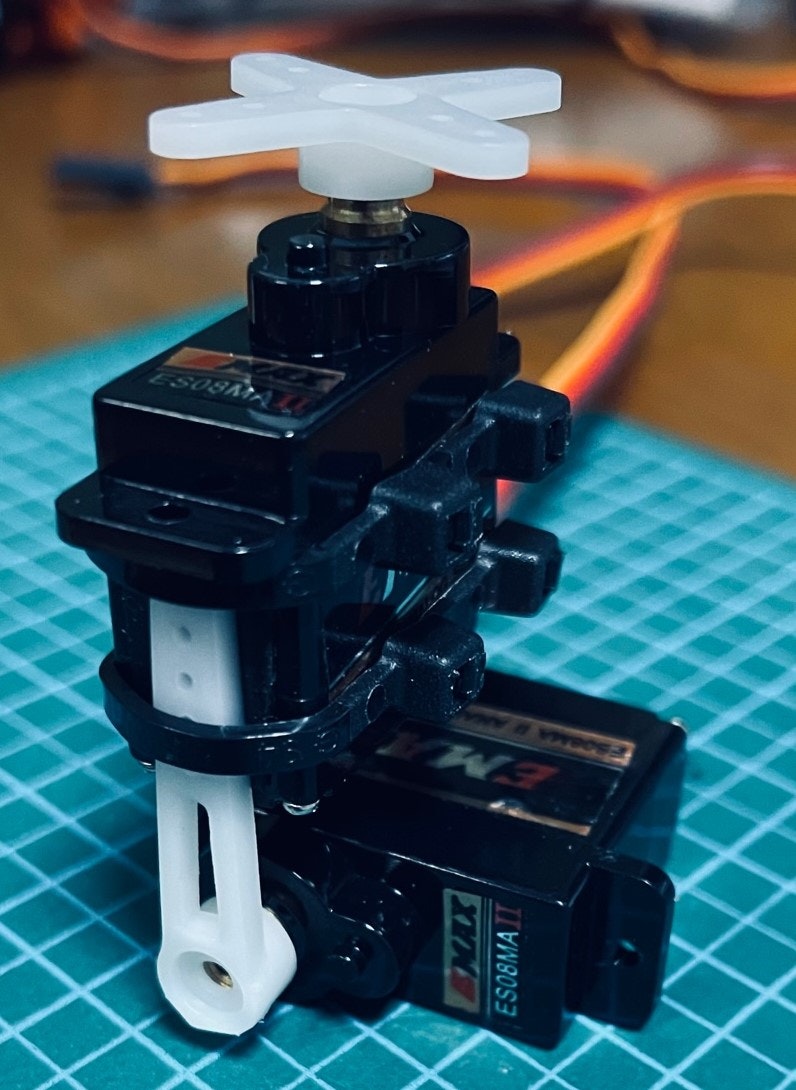
両脚作ります
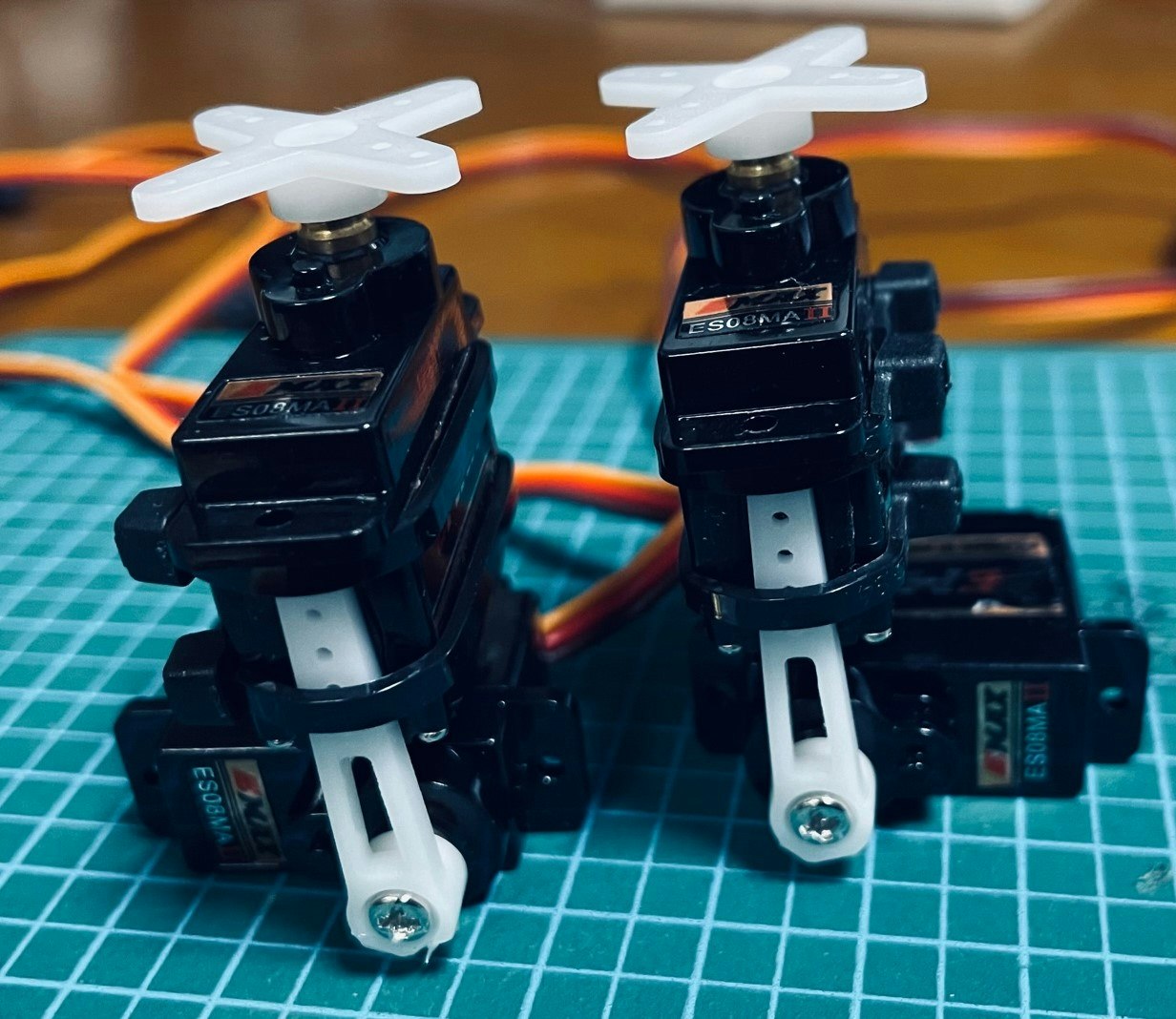
HipLeft HipRight
+----+ +----+
| || | | || |
| || | | || |
+-||-+ +-||-+
+-----||-+ +-||-----+
| ++ | | ++ |
+--------+ +--------+
ToesLeft ToesRight
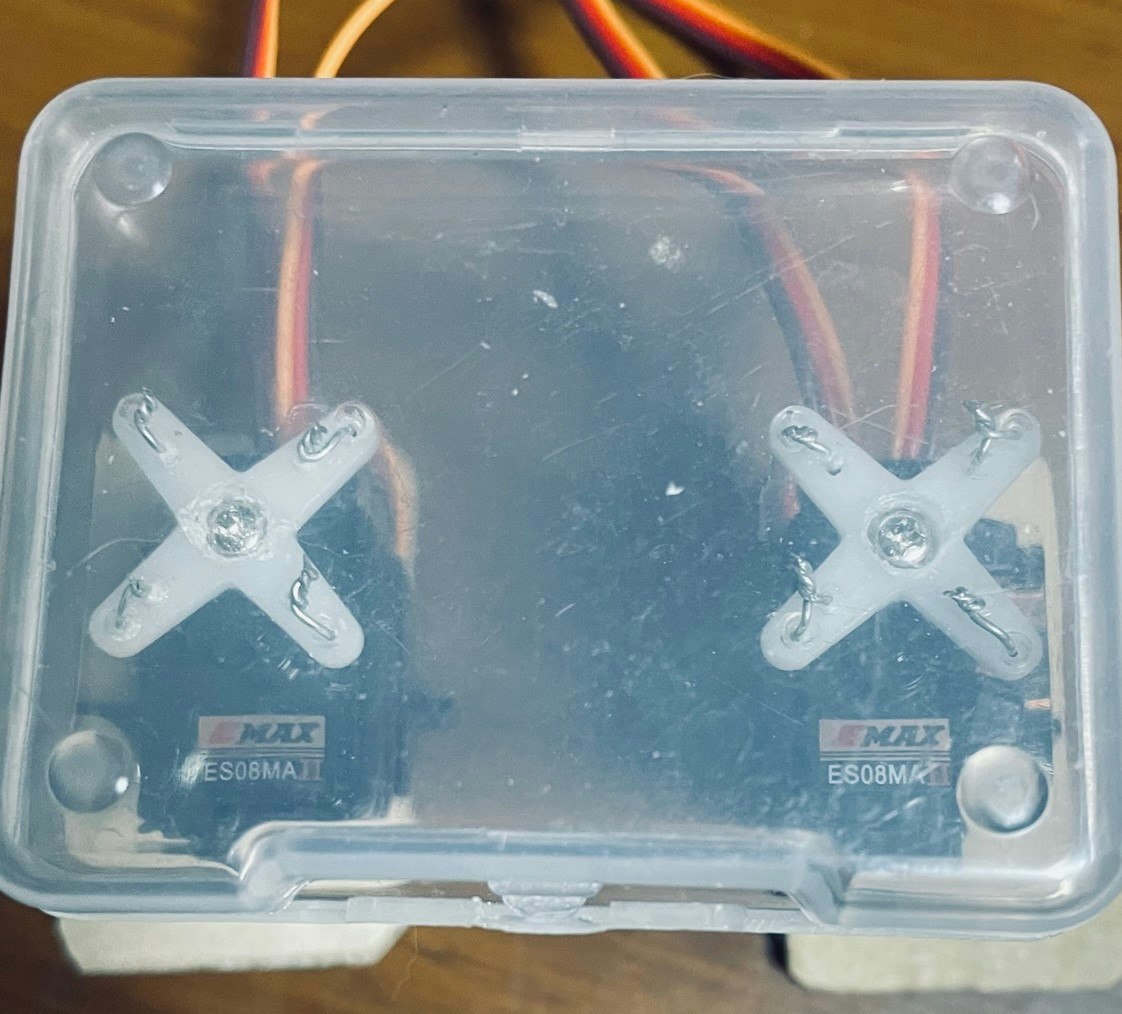
作業の途中でインシュロックがなくなったので
腰はSDカードケースにスズメッキ線で固定っ
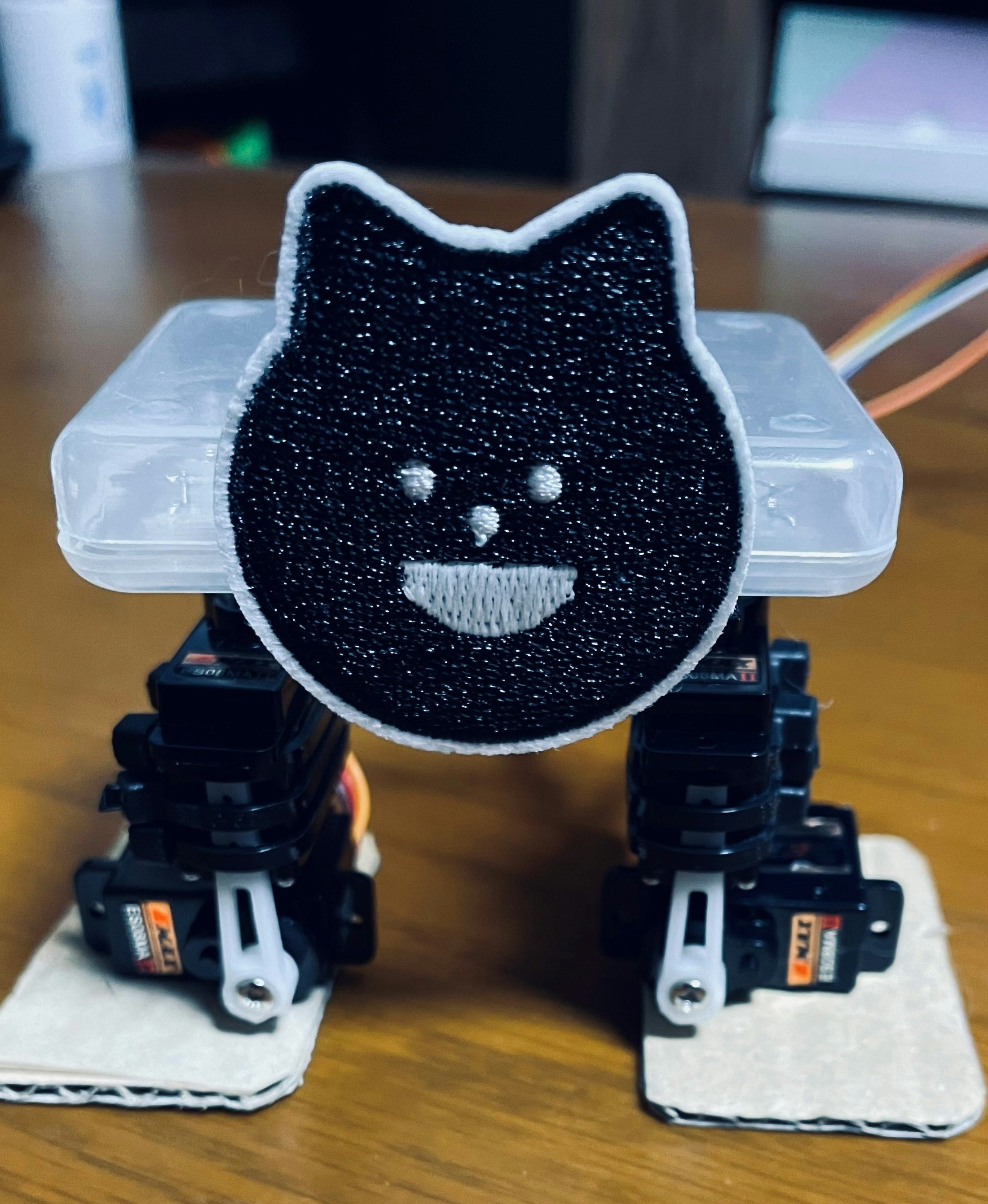
片足でバランスを取るためにアマゾン段ボールで足を作り
サーボ側の配線をきれいにする為に
さらに中間にインシュロックで線を固定
最後に100均で買った猫のアップリケを装着(重要!)
* このアップリケ紫外線(UV)に反応するんですって
どーんっ
9. さいごに
いやぁ 2日間という縛りで
なんとかサーボのリンクまでは終わりました
次回ソフト編につづきます
ご視聴ありがとうございました