目的
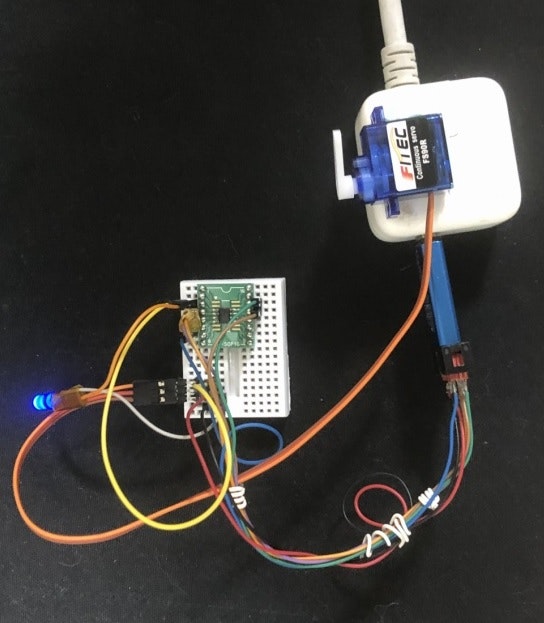
360サーボで遊ぶ(FS90R)
===完成202403292015===

結果
プログラム
//PWM_Servo_C011_3
//定義
//左端 -90のステップ
#define V_M_90 2300
//中心の0のステップ
#define V_0 1500
//右端 90 計算値
//#define V_90 700
#define DD PB7 // potentiometer connected to analog pin x
//サーボ関数
//入力は、-90から90 サーボが仕様の端から端まで動く値
void Servo_S(int b) {
int ii=map(b,-90,0,V_M_90,V_0);
int jj=map(ii,0,20000,0,65536);
analogWrite(DD, jj); // analogRead values go from 0
} //Servo_S
//初期化
void setup() {
delay(3000);//マッポの手先、消したら、いかんぜょ(斎藤由紀風)
//GPIOの初期化
pinMode(DD, OUTPUT); // sets the LED pin as output
analogWriteFrequency(50); //周波数
analogWriteResolution(16); //分解能
} //setup
//メインループ
void loop() {
Servo_S(-90); delay(2000); //2秒待つ
Servo_S(0); delay(2000); //2秒待つ
Servo_S(90); delay(2000); //2秒待つ
Servo_S(0); delay(2000); //2秒待つ
} //loop