注意
- 過去ログを見よ!!!
- RCサーボーモータは、SG90を使用
- 両方ともM5NanoC6
- 自己責任の意味がわかる人
- ESP32 Arduino 3.1.3
- あまり正確では、ない
- 10ビット(1024)の固定小数点の処理をしている
- おどしでも、冗談でもなく、サーボ系は、一発で終わるので、ちょとめんどい。(悪い意味)
- サーボをパソコンに繋いだままやるとパソコンが破壊されます。
- モーター、コイル等、逆起電力で高電圧が発生する時の安全対策は、各自実行してください。
- 最低でも、試す時は、モバイルバッテリを使用してください。
- モータ系の力学装置系をなぜ、あまりやらないのかは、まず、物理的にお金がかかる、いろいろ、危険であるから
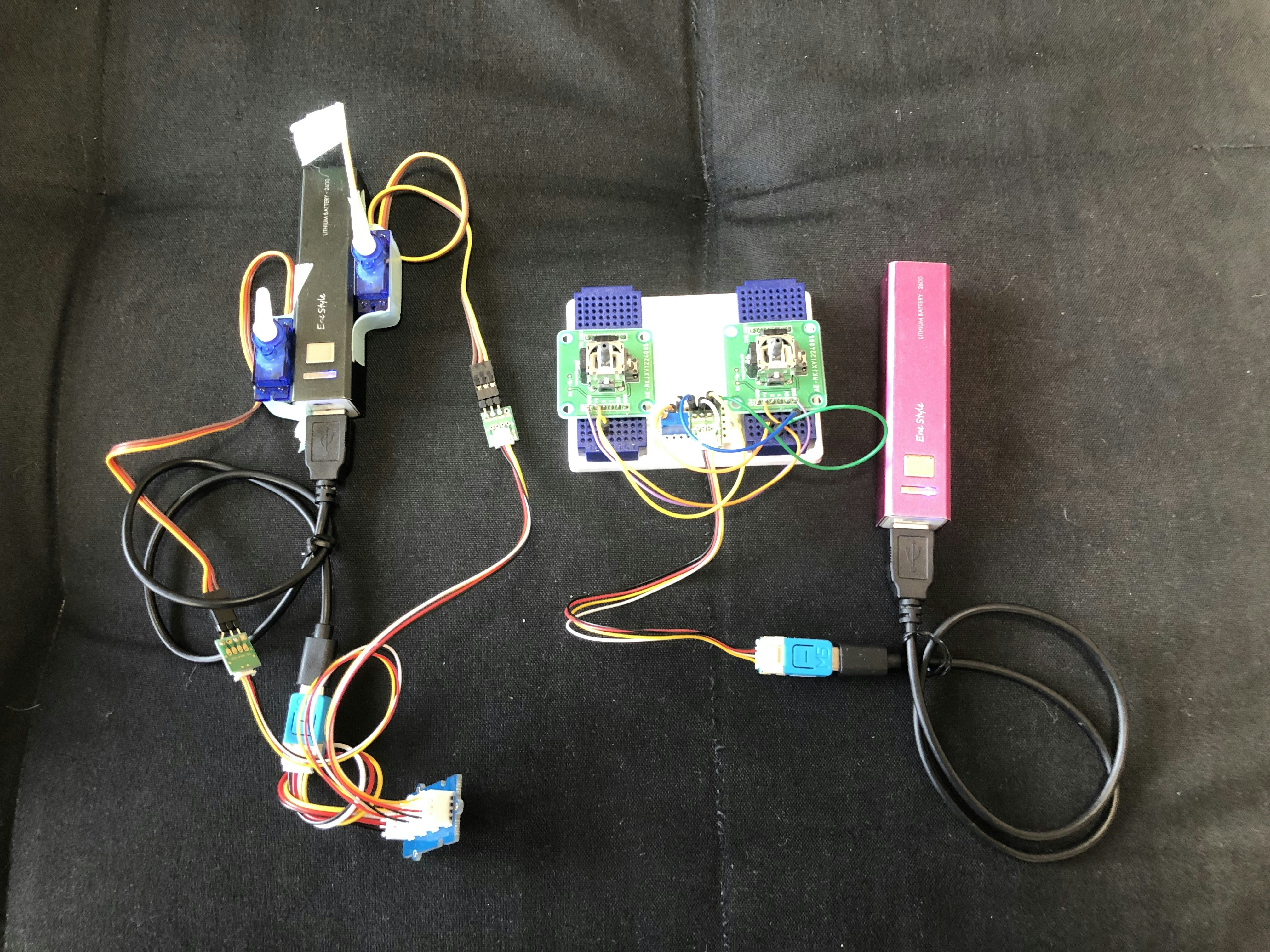
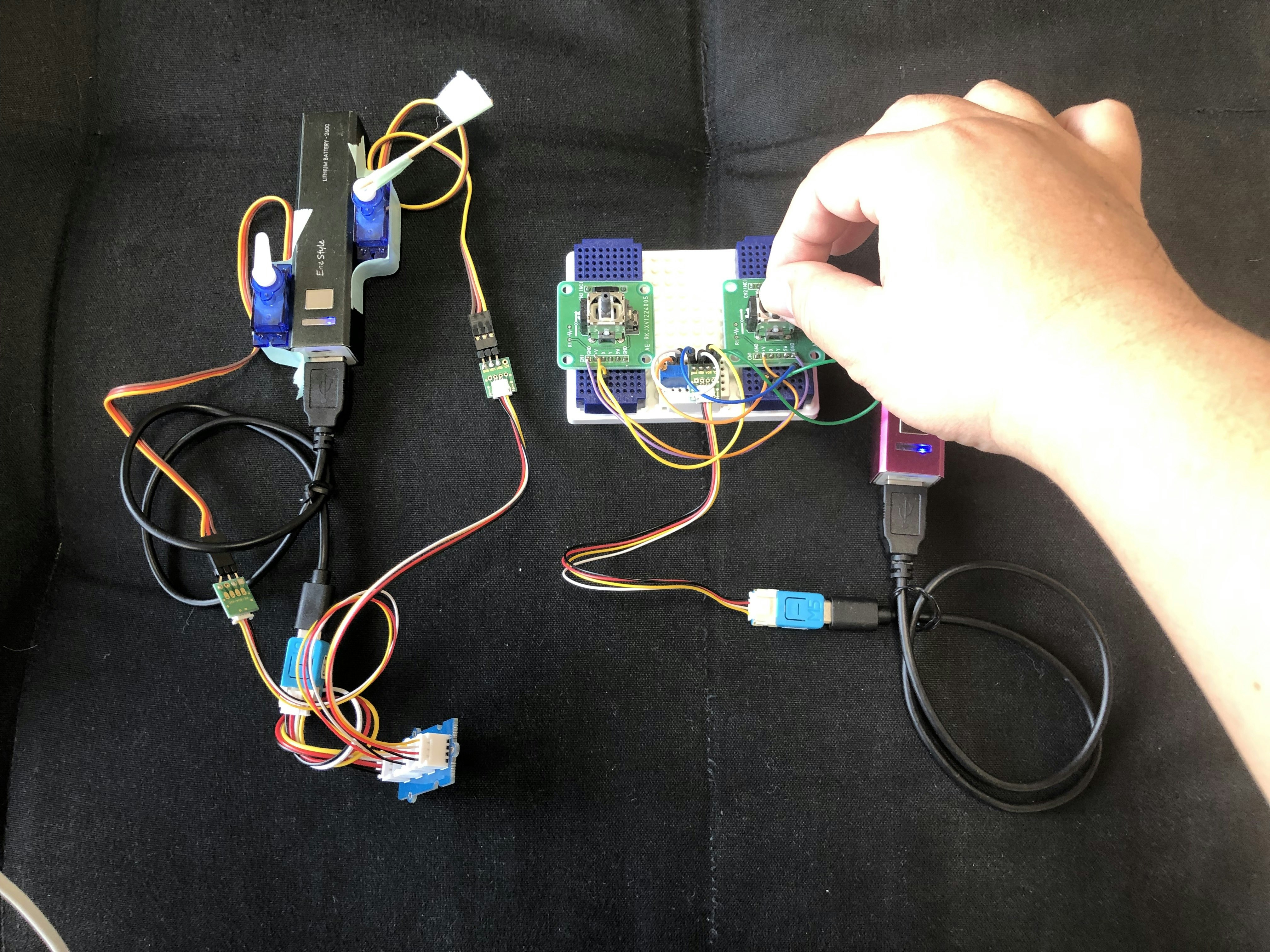
結果
プログラム
//ESP32_NOW_m_analog_joystick_7_M5NanoC6_1
//1対1に改造する 対応
//ブロードキャスト
//最小二乗法
//0点の改善(20250225)
//インクルド (ESP-NOW)
#include <Arduino.h>
#include <string.h> //memcpy
#include "ESP32_NOW.h"
#include "WiFi.h"
#include <esp_mac.h> // For the MAC2STR and MACSTR macros
//定義
/* Definitions */
//WiFiチャンネルの指定
#define ESPNOW_WIFI_CHANNEL 1
//クラス
/* Classes */
// Creating a new class that inherits from the ESP_NOW_Peer class is required.
class ESP_NOW_Broadcast_Peer : public ESP_NOW_Peer {
public:
// Constructor of the class using the broadcast address
ESP_NOW_Broadcast_Peer(const uint8_t *mac_addr, uint8_t channel, wifi_interface_t iface, const uint8_t *lmk)
: ESP_NOW_Peer(mac_addr, channel, iface, lmk) {}
// Destructor of the class
~ESP_NOW_Broadcast_Peer() {
remove();
}
// Function to properly initialize the ESP-NOW and register the broadcast peer
bool begin() {
if (!ESP_NOW.begin() || !add()) {
log_e("Failed to initialize ESP-NOW or register the broadcast peer");
return false;
}
return true;
}
// Function to send a message to all devices within the network
bool send_message(const uint8_t *data, size_t len) {
if (!send(data, len)) {
log_e("Failed to broadcast message");
return false;
}
return true;
}
};
/* Global Variables */
//ブロードキャスト オブジェクトの定義
// Create a broadcast peer object
ESP_NOW_Broadcast_Peer broadcast_peer(ESP_NOW.BROADCAST_ADDR, ESPNOW_WIFI_CHANNEL, WIFI_IF_STA, NULL);
//const MacAddress peer_mac({0x48, 0x27, 0xe2, 0xe3, 0xbd, 0x50});
//ESP_NOW_Broadcast_Peer broadcast_peer( peer_mac , ESPNOW_WIFI_CHANNEL, WIFI_IF_STA, NULL);
/* Main */
#define CP (uint8_t *)
#define G_X 2
#define G_Y 1
float o_yl = 0; //L側の0(ゼロ)点
float o_yr = 0; //R側の0(ゼロ)点
//初期化
void setup() {
//WiFiの初期化
// Initialize the Wi-Fi module
WiFi.mode(WIFI_STA);
WiFi.setChannel(ESPNOW_WIFI_CHANNEL);
delay(3000); //決め打ちなので、おかしかったら調整してね!
// //シリアルの初期化 //debug(1)
// Serial.begin(9600);
// Serial.println();
// //シリアルの待ちが0.5*9
// for (int i = 0; i < 9; i++) {
// Serial.print('.'); delay(500); //接続待ち
// } //for
// Serial.println();
//ブロードキャストの初期化
// Register the broadcast peer
if (!broadcast_peer.begin()) {
delay(5000); //瞬リセット防止用
ESP.restart(); //リセット
} //endif
//テストメッセージを送る
char pp[] = { 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00 };
delay(5);
broadcast_peer.send_message(CP(pp), 8 + 0);
delay(5);
broadcast_peer.send_message(CP(pp), 8 + 0);
delay(5);
broadcast_peer.send_message(CP(pp), 8 + 0);
delay(5);
//アナログジョイステックの初期化と0点の設定
//gpio inte
pinMode(G_X, ANALOG); //gpio init
pinMode(G_Y, ANALOG); //gpio init
//R START
int s = 0; //input
for (int i = 0; i < 65536; i++) {
//センサー入力する
s = s + analogRead(G_X); //センサーの値
} //for
s = s * 10;
s = s / 65536;
o_yl = ((float)s) * 0.0001;
//R START
s = 0;
for (int i = 0; i < 65536; i++) {
//センサー入力する
s = s + analogRead(G_Y); //センサーの値
} //for
s = s * 10;
s = s / 65536;
o_yr = ((float)s) * 0.0001;
// //debug 0点の値を無線電送
// struct {
// float yl; //L側
// float yr; //R側
// } debug_y;
//
// debug_y.yl = o_yl;
// debug_y.yr = o_yr;
//
// //int (32bit) を byte に分割する処理
// unsigned char *p;
// p = (unsigned char *)(&debug_y);
// memcpy(pp, p, sizeof(debug_y));
//
// //ESP-NOWのパケット(フレーム)を送信する
// broadcast_peer.send_message(CP(pp), sizeof(debug_y));
// delay(5);
//
// delay(3000);
} //setup
//送信バッファー int(32bit)
//グローバルで定義しているのは、速度低下を防ぐため
unsigned char ac[] = { 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00 };
struct {
float yl; //L側
float yr; //R側
} Ys;
//メインループ
void loop() {
int o_n[20]; //一時配列
int s; //input
int xydie = 0; //x偏差とy偏差
int b; //傾き
int a; //初期位置
//llllllllllllllllllllllllllllllll START
s = 0;
for (int i = 1; i <= 15; i++) {
//センサー入力する
s = s + (o_n[i] = (analogRead(G_X) * 1000)); //センサーの値
} //for
s = s / 15; // s / 15
xydie = 0;
for (int i = 1; i <= 15; i++) {
xydie = xydie + ( (i - 8) * (o_n[i] - s) );
//Serial.printf("%d,",(i - 8) * (o_n[i] - s) );
} //for
b = xydie / 280;
//int a = s -(xydie / 280)*8;
a = s - ((xydie * 8) / 280);
//Serial.printf("\n");
//Serial.printf("xydie = %d\n", xydie);
//Serial.printf("\n");
//Serial.printf("b = %d\n", b);
//Serial.printf("a = %d\n", a);
//c_yl = ((float)(a+b*15)) * (3.3f / 4096.0f); // 電圧こと
//c_yl = ((float)(a+((xydie*15) / 280))) * (3.3f / 4096.0f); // 電圧こと
Ys.yl = ((float)(a + ((xydie * 15) / 280))) * 0.000001f; // 電圧こと x0.000001 = /1000000
Ys.yl = Ys.yl - o_yl;
//表示
//Serial.printf("L=%f\n", Ys.yl);
//Serial.println();
//llllllllllllllllllllllllllllllll END
//RRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRR START
s = 0;
for (int i = 1; i <= 15; i++) {
//センサー入力する
s = s + (o_n[i] = (analogRead(G_Y) * 1000)); //センサーの値
} //for
s = s / 15; // s / 15
xydie = 0;
for (int i = 1; i <= 15; i++) {
xydie = xydie + ( (i - 8) * (o_n[i] - s) );
//Serial.printf("%d,",(i - 8) * (o_n[i] - s) );
} //for
b = xydie / 280;
//int a = s -(xydie / 280)*8;
a = s - ((xydie * 8) / 280);
//Serial.printf("\n");
//Serial.printf("xydie = %d\n", xydie);
//Serial.printf("\n");
//Serial.printf("b = %d\n", b);
//Serial.printf("a = %d\n", a);
//c_yr = ((float)(a+b*15)) * (3.3f / 4096.0f); // 電圧こと
//c_yr = ((float)(a+((xydie*15) / 280))) * (3.3f / 4096.0f); // 電圧こと
Ys.yr = ((float)(a + ((xydie * 15) / 280))) * 0.000001f; // 電圧こと x0.000001 = /1000000
Ys.yr = Ys.yr - o_yr;
//表示
//Serial.printf("R=%f\n", Ys.yr);
//Serial.println();
//RRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRR END
//int (32bit) を byte に分割する処理
unsigned char *p;
p = (unsigned char *)(&Ys);
memcpy(ac, p, sizeof(Ys));
//ESP-NOWのパケット(フレーム)を送信する
broadcast_peer.send_message(CP(ac), sizeof(Ys));
delay(5);
//Serial.printf("%f,%f\n", Ys.yl,Ys.yr); //debug(1)
delay(300); //0.3秒待つ
} //loop
//ESP32_NOW_s_analog_joystick_7_M5NanoC6_1
//1対1に改造する 対応
//ブロードキャスト
//いちお、割り込み時の事を考えた
//主に表示の桁揃えをした(20250225)
/*
ESP-NOW Broadcast Slave
Lucas Saavedra Vaz - 2024
This sketch demonstrates how to receive broadcast messages from a master device using the ESP-NOW protocol.
The master device will broadcast a message every 5 seconds to all devices within the network.
The slave devices will receive the broadcasted messages. If they are not from a known master, they will be registered as a new master
using a callback function.
*/
//インクルド
#include <Arduino.h>
#include <string.h> //memcpy
#include "ESP32_NOW.h"
#include "WiFi.h"
#include <esp_mac.h> // For the MAC2STR and MACSTR macros
#include <vector>
#include "MacAddress.h"
//定義
struct {
float yl; //左側のy
float yr; //右側のy
} Ys;
static volatile int s_p = 0; //割り込み処理中フラグ
//使い方 SOのマクロに0から180を設定すると
//PWMの間隔の値が返る
// a = SO(i);
// //a = SO(180-i);
//V_0が0度の時の初期値で単位は、nS(ナノ秒)
//V_180が180度の時の初期値で単位は、nS(ナノ秒)
//SO(角度) 正転
//M_SO(角度) 逆転
#define V_0 500
#define V_180 2400
#define Wavelength_1count (((1000000/50)*1024)/4096)
#define T_MIN ((V_0*1024)/Wavelength_1count)
#define T_MAX ((V_180*1024)/Wavelength_1count)
#define HH ((T_MAX-T_MIN)*1024)/180
#define SO(AA) (T_MIN+(((AA)*(HH))>>10))
#define M_SO(AA) (SO(180-(AA)))
//PWMのポート、周期、分解度のビット数
#define PWM_PIN_A 1
#define PWM_PIN_B 2
#define FREQUENCY 50
#define RESOLUTION 12
/* Definitions */
#define ESPNOW_WIFI_CHANNEL 1
//プロトタイプ宣言
int acceleration_num();
void acceleration_write(unsigned char *a);
void acceleration_read(unsigned char *a);
//クラス
/* Classes */
// Creating a new class that inherits from the ESP_NOW_Peer class is required.
class ESP_NOW_Peer_Class : public ESP_NOW_Peer {
public:
// Constructor of the class
ESP_NOW_Peer_Class(const uint8_t *mac_addr, uint8_t channel, wifi_interface_t iface, const uint8_t *lmk)
: ESP_NOW_Peer(mac_addr, channel, iface, lmk) {}
// Destructor of the class
~ESP_NOW_Peer_Class() {}
// Function to register the master peer
bool add_peer() {
if (!add()) {
log_e("Failed to register the broadcast peer");
return false;
}
return true;
}
// Function to print the received messages from the master
void onReceive(const uint8_t *data, size_t len, bool broadcast) {
s_p = 1;
//読み込みデータが8バイトの時
if (len == sizeof(Ys)) {
//読み込みデータをセンサーの値に合成する
unsigned char *p;
p = (unsigned char *)(&Ys);
memcpy(p, data, sizeof(Ys)); //センサーの値をセット
} //if
//Serial.printf("Received a message from master " MACSTR " (%s)\n", MAC2STR(addr()), broadcast ? "broadcast" : "unicast");
//Serial.printf(" Message: %s\n", (char *)data);
s_p = 0;
}
};
/* Global Variables */
// List of all the masters. It will be populated when a new master is registered
std::vector<ESP_NOW_Peer_Class> masters;
/* Callbacks */
// Callback called when an unknown peer sends a message
void register_new_master(const esp_now_recv_info_t *info, const uint8_t *data, int len, void *arg) {
//自分
const MacAddress peer_mac1( { 0x48, 0x27, 0xe2, 0xe3, 0xbd, 0x50 });
unsigned char a_add[6] = { 0x48, 0x27, 0xe2, 0xe3, 0xbd, 0x50 };
//相手
const MacAddress peer_mac2( { 0x40, 0x4c, 0xca, 0x5a, 0xe3, 0x1c });
if (memcmp(info->des_addr, ESP_NOW.BROADCAST_ADDR, 6) == 0) {
//if (memcmp(info->des_addr, a_add, 6) == 0) {
Serial.printf("Unknown peer " MACSTR " sent a broadcast message\n", MAC2STR(info->src_addr));
Serial.println("Registering the peer as a master");
ESP_NOW_Peer_Class new_master(info->src_addr, ESPNOW_WIFI_CHANNEL, WIFI_IF_STA, NULL);
masters.push_back(new_master);
if (!masters.back().add_peer()) {
Serial.println("Failed to register the new master");
return;
}
} else {
// The slave will only receive broadcast messages
log_v("Received a unicast message from " MACSTR, MAC2STR(info->src_addr));
log_v("Igorning the message");
}
}
/* Main */
//初期化
void setup() {
//出力ピンの初期化
pinMode(PWM_PIN_A, OUTPUT);
pinMode(PWM_PIN_B, OUTPUT);
// PWM設定(ピン番号, 周波数, 分解能)
ledcAttach(PWM_PIN_A, FREQUENCY, RESOLUTION);
ledcAttach(PWM_PIN_B, FREQUENCY, RESOLUTION);
//WiFiの初期化
// Initialize the Wi-Fi module
WiFi.mode(WIFI_STA);
WiFi.setChannel(ESPNOW_WIFI_CHANNEL);
//シリアルの初期化
Serial.begin(9600);
Serial.println();
//シリアルの待ちが0.5*9
//delay(3000);//決め打ちなので、おかしかったら調整してね! wifiの待ち0.5*6
for (int i = 0; i < (9 + 6); i++) {
delay(500); //接続待ち
Serial.print('.');
} //for
Serial.println();
delay(500);
//アドレスとWiFiチャンネルの表示
Serial.println("ESP-NOW Example - Broadcast Slave");
Serial.println("Wi-Fi parameters:");
Serial.println(" Mode: STA");
Serial.println(" MAC Address: " + WiFi.macAddress());
Serial.printf(" Channel: %d\n", ESPNOW_WIFI_CHANNEL);
//ブロードキャストの初期化
// Initialize the ESP-NOW protocol
if (!ESP_NOW.begin()) {
Serial.println("Failed to initialize ESP-NOW");
Serial.println("Reeboting in 5 seconds...");
delay(5000); //瞬リセット防止用
ESP.restart(); //リセット
} //endif
//ESP-NOWのコールバック(割り込み)
// Register the new peer callback
ESP_NOW.onNewPeer(register_new_master, NULL);
//スタートが成功したと表示
Serial.println("Setup complete. Waiting for a master to broadcast a message...");
} //setup
//メインループ
void loop() {
//表示
while (s_p) {} //書き換え中の時
Serial.printf("%9.6f", Ys.yl);
Serial.print(',');
while (s_p) {} //書き換え中の時
Serial.printf("%9.6f", Ys.yr);
Serial.println();
//Serial.printf("Received a message from master " MACSTR " (%s)\n", MAC2STR(addr()), broadcast ? "broadcast" : "unicast");
//Serial.printf(" Message: %s\n", (char *)data);
float f; //一時
// DUTY比を指定して、ポートに対して実行
while (s_p) {} //書き換え中の時
f = Ys.yl;
f = f * (90.0f /1.650f );
f = f + 90.0f;
if(f > 180.0f) {f = 180.0f;}
if(f < 0.0f) {f = 0.0f;}
Serial.printf("A%9.6f\n", f);
ledcWrite(PWM_PIN_A, M_SO(((int)f)));
// DUTY比を指定して、ポートに対して実行
while (s_p) {} //書き換え中の時
f = Ys.yr;
f = f * (90.0f /1.650f );
f = f + 90.0f;
if(f > 180.0f) {f = 180.0f;}
if(f < 0.0f) {f = 0.0f;}
Serial.printf("B%9.6f\n", f);
ledcWrite(PWM_PIN_B, M_SO(((int)f)));
delay(300); //ダミー 0.3秒待つ
} //loop