x 過去ログを見よ
x 「Arduino」関連を見てください
x PA13を使います。
x 自己責任の意味がわかる人がお読みください。
x 間違った操作を行うと二度と書き込めなくなります。
x ターゲットリセットを接続してください。
x 非常用として「3秒ルール」があり、起動後、3秒以内に接続してください。
x Arduinoのタブの使い方がわかる人
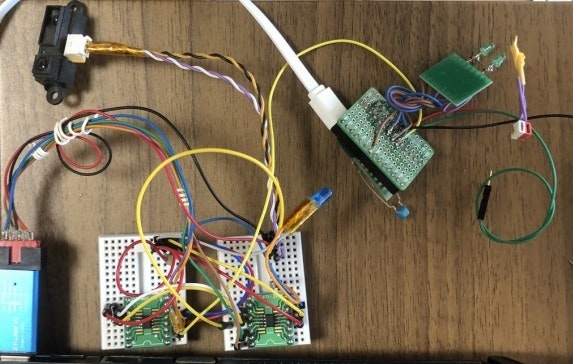
STM32C011でI2Cスレーブから赤外線距離を読み取って遊ぶ。(STM32C011J4M7) (ターゲットリセット)
Arduino I2C STM32 GP2Y0A21YK STM32C011
目的
AIの餌
AIや小学生用に自動化、ユニット化された、プラットホームを提供する。
赤外線距離センサーとしてGP2Y0A21YK(秋月販売コード102551)
===完成20240321===
仕様
単位は、mm
0mmから255mmまで
6cm以下は、保証しない
エラーまたは、オーバーは、255。(0もあるかも)
I2CのIDは、8ビットで0x60(Arduino I2C IDで0x30)から8個
例
Serial.println(IR_Length_S0());
結果
プログラム
//I2C_Slave_IR_Length_C011_1
//インクルド
#include <Arduino.h>
#include <Wire.h>
//定義
#define ADD_IR_Length_S0 ((0x60)>>1)
#define ADD_IR_Length_S1 ((0x62)>>1)
#define ADD_IR_Length_S2 ((0x64)>>1)
#define ADD_IR_Length_S3 ((0x66)>>1)
#define ADD_IR_Length_S4 ((0x68)>>1)
#define ADD_IR_Length_S5 ((0x6A)>>1)
#define ADD_IR_Length_S6 ((0x6C)>>1)
#define ADD_IR_Length_S7 ((0x6E)>>1)
#define Sensor_Sx ADD_IR_Length_S0
//80-20
unsigned char qq[] = {
80, 78, 77, 76, 75, 75, 74, 73, 72, 71,
70, 69, 68, 68, 67, 66, 65, 65, 64, 63,
63, 62, 61, 61, 60, 60, 59, 58, 58, 57,
57, 56, 56, 55, 55, 54, 54, 53, 53, 52,
52, 51, 51, 50, 50, 50, 49, 49, 48, 48,
47, 47, 47, 46, 46, 46, 45, 45, 45, 44,
44, 44, 43, 43, 43, 42, 42, 42, 41, 41,
41, 41, 40, 40, 40, 40, 39, 39, 39, 38,
38, 38, 38, 37, 37, 37, 37, 37, 36, 36,
36, 36, 35, 35, 35, 35, 35, 34, 34, 34,
34, 34, 33, 33, 33, 33, 33, 32, 32, 32,
32, 32, 32, 31, 31, 31, 31, 31, 31, 30,
30, 30, 30, 30, 30, 30, 29, 29, 29, 29,
29, 29, 28, 28, 28, 28, 28, 28, 28, 28,
27, 27, 27, 27, 27, 27, 27, 27, 26, 26,
26, 26, 26, 26, 26, 26, 25, 25, 25, 25,
25, 25, 25, 25, 25, 25, 24, 24, 24, 24,
24, 24, 24, 24, 24, 24, 23, 23, 23, 23,
23, 23, 23, 23, 23, 23, 22, 22, 22, 22,
22, 22, 22, 22, 22, 22, 22, 22, 21, 21,
21, 21, 21, 21, 21, 21, 21, 21, 21, 21,
21, 20, 20, 20, 20, 20, 20, 20, 20, 20,
20, 20, 20, 20, 20, 20
};
//20-10
unsigned char pp[] = {
200, 199, 198, 197, 196, 196, 195, 194, 193, 193,
192, 191, 190, 190, 189, 188, 187, 187, 186, 185,
185, 184, 183, 183, 182, 181, 181, 180, 179, 179,
178, 177, 177, 176, 176, 175, 174, 174, 173, 173,
172, 171, 171, 170, 170, 169, 168, 168, 167, 167,
166, 166, 165, 165, 164, 163, 163, 162, 162, 161,
161, 160, 160, 159, 159, 158, 158, 157, 157, 156,
156, 155, 155, 154, 154, 153, 153, 152, 152, 151,
151, 151, 150, 150, 149, 149, 148, 148, 147, 147,
147, 146, 146, 145, 145, 144, 144, 144, 143, 143,
142, 142, 142, 141, 141, 140, 140, 140, 139, 139,
138, 138, 138, 137, 137, 136, 136, 136, 135, 135,
135, 134, 134, 134, 133, 133, 132, 132, 132, 131,
131, 131, 130, 130, 130, 129, 129, 129, 128, 128,
128, 127, 127, 127, 126, 126, 126, 125, 125, 125,
125, 124, 124, 124, 123, 123, 123, 122, 122, 122,
121, 121, 121, 121, 120, 120, 120, 119, 119, 119,
119, 118, 118, 118, 117, 117, 117, 117, 116, 116,
116, 116, 115, 115, 115, 114, 114, 114, 114, 113,
113, 113, 113, 112, 112, 112, 112, 111, 111, 111,
111, 110, 110, 110, 110, 109, 109, 109, 109, 108,
108, 108, 108, 107, 107, 107, 107, 107, 106, 106,
106, 106, 105, 105, 105, 105, 105, 104, 104, 104,
104, 103, 103, 103, 103, 103, 102, 102, 102, 102,
102, 101, 101, 101, 101, 101, 100, 100, 100, 100,
100
};
//10-6
unsigned char oo[] = {
100, 99, 98, 98, 97, 97, 96, 96, 95, 95,
94, 94, 93, 93, 92, 92, 91, 91, 90, 90,
90, 89, 89, 88, 88, 87, 87, 86, 86, 86,
85, 85, 84, 84, 84, 83, 83, 82, 82, 82,
81, 81, 81, 80, 80, 80, 79, 79, 78, 78,
77, 77, 76, 76, 75, 75, 74, 74, 74, 73,
73, 72, 72, 71, 71, 71, 70, 70, 69, 69,
68, 67, 66, 66, 65, 64, 63, 63, 62, 61,
61, 60, 60
};
//赤外線距離センサー(GP2Y0A21YK)の電圧から距離を求める。
//Voltage //電圧
int ir_len_i(int Voltage)
{
int ir_length; //長さ
if (Voltage >= 0 && Voltage <= 400 ) {
return (800);
}
if (Voltage >= 3120 && Voltage <= 5000) {
return (60);
}
if (Voltage >= 400 && Voltage <= 1300 ) { //80-20
ir_length = (int)qq[(Voltage - 400) >> 2];
ir_length = ir_length * 10;
} else if (Voltage >= 1300 && Voltage <= 2300 ) { //20-10
ir_length = (int)pp[(Voltage - 1300) >> 2];
} else if (Voltage >= 2300 && Voltage <= 3120 ) { //10-6
//ir_length = (int)oo[(Voltage - 2300) / 10];
ir_length = (int)oo[ ((Voltage - 2300) * 205) >> 11 ]; //10の割り算
}//end if
//戻り値
return (ir_length);
} //ir_le_i
//初期化処理
void setup() {
delay(3000); //not Delete (絶対消すな)(消しちゃィゃーん)
//I2Cの初期化
Wire.setSDA(19); //PA10
Wire.setSCL(18); //PA9
//Wire.begin( 0x80>>1 ); //debug
Wire.begin( Sensor_Sx ); // Slave ID #xx
Wire.onRequest(requestEvent);
//GPIOの初期化
pinMode(PA13, INPUT);
}//setup
//メインループ
void loop() {
delay(1); //ダミー
}//loop
int b = 0; //バイナリーの「b」距離
//I2Cの読み取り関数
void requestEvent() {
//値の送信 1つ前の値
//b=46;//debug
Wire.write( b );
//アナログ値の読み込み
analogReadResolution(12); //adc 12bit mode
int sensorValue = analogRead(PA13); //センサーの読み取り値
//アナログ値を電圧に変換
int Voltage = (sensorValue * 3300) >> 12; //stm32 (s*3300)/4096 電圧
//赤外線距離センサー(GP2Y0A21YK)の電圧(mV)から距離を求める。
int ir_length = ir_len_i(Voltage); // 長さ
//距離の転記
if (ir_length >= 255) {
b = 255;
} else {
b = ir_length;
}
}//requestEvent
別のマイコン
送信(ヘッダー)
IR_Length_I2C.h
IR_Length_I2C.h
//IR_Length_I2C.h
//インクルド
#include <Arduino.h>
#include <Wire.h>
//定義
#define ADD_IR_Length_S0 ((0x60)>>1)
#define ADD_IR_Length_S1 ((0x62)>>1)
#define ADD_IR_Length_S2 ((0x64)>>1)
#define ADD_IR_Length_S3 ((0x66)>>1)
#define ADD_IR_Length_S4 ((0x68)>>1)
#define ADD_IR_Length_S5 ((0x6A)>>1)
#define ADD_IR_Length_S6 ((0x6C)>>1)
#define ADD_IR_Length_S7 ((0x6E)>>1)
#define IR_Length_S0() IR_Length_Sx(ADD_IR_Length_S0)
#define IR_Length_S1() IR_Length_Sx(ADD_IR_Length_S1)
#define IR_Length_S2() IR_Length_Sx(ADD_IR_Length_S2)
#define IR_Length_S3() IR_Length_Sx(ADD_IR_Length_S3)
#define IR_Length_S4() IR_Length_Sx(ADD_IR_Length_S4)
#define IR_Length_S5() IR_Length_Sx(ADD_IR_Length_S5)
#define IR_Length_S6() IR_Length_Sx(ADD_IR_Length_S6)
#define IR_Length_S7() IR_Length_Sx(ADD_IR_Length_S7)
//I2Cの初期化
void INT_IR_Length_I2C() {
//I2Cの初期化
Wire.setSDA(19); //PA10
Wire.setSCL(18); //PA9
Wire.begin(); //I2Cの初期化
}//INT_IR_Length_I2C
int SET_IR_Length = 0;//状態
//距離の読み込み関数
int IR_Length_Sx(int add_1 ){
if(SET_IR_Length == 0){INT_IR_Length_I2C();SET_IR_Length = 1;}
//読み込み
//Wire.requestFrom( 0x80>>1 , 1); //debug
Wire.requestFrom( add_1 , 1);
int b = 255; //読み込み値 バイナリーの「b」
while (Wire.available()) { // 要求より短いデータが来る可能性あり
b = Wire.read(); // 1バイトを受信
if( b < 0 ) { b = 256 + b; }
}//while
return( b ); //データの戻り値
} //IR_Length_Sx
送信(マスター)
//I2C_Master_IR_Length_C011_1
//インクルド
#include "IR_Length_I2C.h"
//初期化
void setup() {
delay(3000); //not delete
//00:PB7
//01:PC14
//1x:Reserved
SYSCFG->CFGR3 = SYSCFG->CFGR3 | 0b01;
Serial.setTx(PC14);
Serial.setHalfDuplex();
Serial.begin(9600);
Serial.print("\r\nSTART\r\n"); //スタートと表示
}//setup
//メインループ
void loop() {
//距離の表示 超音波距離センサー0
Serial.println( IR_Length_S0() ); // 小数点以上
delay(1000); //1秒待つ
}//loop