目的
I2Cだと約20cmから約30cmと伝送距離が短いので
シリアルを使い伝送距離(約2mから3m)を延ばす。
STM32L010のスレーブ
//ser_slave_ir_length_010_1
#include "mbed.h"
//10の割り算 0から1028までは、正しい。主に0から999
#define DIV10(n) ((n*205)>>11)
DigitalOut TX(PA_2);
DigitalIn RX(PA_3);
#define UART_DELAY 101 // 1/9600 98-105
//仮想シリアルへの一文字出力 9600bps
int pc_putc(char ch)
{
TX=1;
TX=0;//Start
wait_us(UART_DELAY);
for(int ii=0; ii<8; ii++) { //Data x 8
TX=(ch>>ii)&1;
wait_us(UART_DELAY);
}; //for
TX=1;//Stop
wait_us(UART_DELAY);
return(0);
} //pc_putc
//80-20
unsigned char qq[] = {
80, 78, 77, 76, 75, 75, 74, 73, 72, 71,
70, 69, 68, 68, 67, 66, 65, 65, 64, 63,
63, 62, 61, 61, 60, 60, 59, 58, 58, 57,
57, 56, 56, 55, 55, 54, 54, 53, 53, 52,
52, 51, 51, 50, 50, 50, 49, 49, 48, 48,
47, 47, 47, 46, 46, 46, 45, 45, 45, 44,
44, 44, 43, 43, 43, 42, 42, 42, 41, 41,
41, 41, 40, 40, 40, 40, 39, 39, 39, 38,
38, 38, 38, 37, 37, 37, 37, 37, 36, 36,
36, 36, 35, 35, 35, 35, 35, 34, 34, 34,
34, 34, 33, 33, 33, 33, 33, 32, 32, 32,
32, 32, 32, 31, 31, 31, 31, 31, 31, 30,
30, 30, 30, 30, 30, 30, 29, 29, 29, 29,
29, 29, 28, 28, 28, 28, 28, 28, 28, 28,
27, 27, 27, 27, 27, 27, 27, 27, 26, 26,
26, 26, 26, 26, 26, 26, 25, 25, 25, 25,
25, 25, 25, 25, 25, 25, 24, 24, 24, 24,
24, 24, 24, 24, 24, 24, 23, 23, 23, 23,
23, 23, 23, 23, 23, 23, 22, 22, 22, 22,
22, 22, 22, 22, 22, 22, 22, 22, 21, 21,
21, 21, 21, 21, 21, 21, 21, 21, 21, 21,
21, 20, 20, 20, 20, 20, 20, 20, 20, 20,
20, 20, 20, 20, 20, 20
};
//20-10
unsigned char pp[] = {
200, 199, 198, 197, 196, 196, 195, 194, 193, 193,
192, 191, 190, 190, 189, 188, 187, 187, 186, 185,
185, 184, 183, 183, 182, 181, 181, 180, 179, 179,
178, 177, 177, 176, 176, 175, 174, 174, 173, 173,
172, 171, 171, 170, 170, 169, 168, 168, 167, 167,
166, 166, 165, 165, 164, 163, 163, 162, 162, 161,
161, 160, 160, 159, 159, 158, 158, 157, 157, 156,
156, 155, 155, 154, 154, 153, 153, 152, 152, 151,
151, 151, 150, 150, 149, 149, 148, 148, 147, 147,
147, 146, 146, 145, 145, 144, 144, 144, 143, 143,
142, 142, 142, 141, 141, 140, 140, 140, 139, 139,
138, 138, 138, 137, 137, 136, 136, 136, 135, 135,
135, 134, 134, 134, 133, 133, 132, 132, 132, 131,
131, 131, 130, 130, 130, 129, 129, 129, 128, 128,
128, 127, 127, 127, 126, 126, 126, 125, 125, 125,
125, 124, 124, 124, 123, 123, 123, 122, 122, 122,
121, 121, 121, 121, 120, 120, 120, 119, 119, 119,
119, 118, 118, 118, 117, 117, 117, 117, 116, 116,
116, 116, 115, 115, 115, 114, 114, 114, 114, 113,
113, 113, 113, 112, 112, 112, 112, 111, 111, 111,
111, 110, 110, 110, 110, 109, 109, 109, 109, 108,
108, 108, 108, 107, 107, 107, 107, 107, 106, 106,
106, 106, 105, 105, 105, 105, 105, 104, 104, 104,
104, 103, 103, 103, 103, 103, 102, 102, 102, 102,
102, 101, 101, 101, 101, 101, 100, 100, 100, 100,
100
};
//10-6
unsigned char oo[] = {
100, 99, 98, 98, 97, 97, 96, 96, 95, 95,
94, 94, 93, 93, 92, 92, 91, 91, 90, 90,
90, 89, 89, 88, 88, 87, 87, 86, 86, 86,
85, 85, 84, 84, 84, 83, 83, 82, 82, 82,
81, 81, 81, 80, 80, 80, 79, 79, 78, 78,
77, 77, 76, 76, 75, 75, 74, 74, 74, 73,
73, 72, 72, 71, 71, 71, 70, 70, 69, 69,
68, 67, 66, 66, 65, 64, 63, 63, 62, 61,
61, 60, 60
};
//赤外線距離センサー(GP2Y0A21YK)の電圧から距離を求める。
//Voltage //電圧
int ir_len_i(int Voltage)
{
int ir_length; //長さ
if (Voltage >= 0 && Voltage <= 400 ) {
return (800);
}
if (Voltage >= 3120 && Voltage <= 5000) {
return (60);
}
if (Voltage >= 400 && Voltage <= 1300 ) { //80-20
ir_length = (int)qq[(Voltage - 400) >> 2];
ir_length = ir_length * 10;
} else if (Voltage >= 1300 && Voltage <= 2300 ) { //20-10
ir_length = (int)pp[(Voltage - 1300) >> 2];
} else if (Voltage >= 2300 && Voltage <= 3120 ) { //10-6
//ir_length = (int)oo[(Voltage - 2300) / 10];
ir_length = (int)oo[ ((Voltage - 2300)*205)>>11 ]; //10の割り算
}//end if
//戻り値
return (ir_length);
} //ir_le_i
//アナログ入力の設定
AnalogIn adc_vbat(A3); //PA_4
unsigned char b=200; //マスターに返す値
//プロトタイプ宣言
void rx_Event();
//メインルーチン
int main()
{
TX=1; //ポートの初期化
int input_bk;
int input;
//無限ループ
while(1) {
//開始信号の入力
input = RX;
//エッジ検出 信号が変わる
//立ち上がり、立下りの検出
if (input != input_bk) {
//立下り
if ( input == 0 ) {
wait_ms(2); //空読み時間
//b = '0';
//putcNS(b);
rx_Event();
}//end if
}//end if
//信号の保存
input_bk = input;
//0.5秒の待ち
//wait_ms(500);
}//while
}//main
void rx_Event()
{
//ソフトウェアシリアルから距離を出力
pc_putc(b);
/*
//I2Cスレーブの送信データの表示 num debug
int d = b; //buf[0];
//int d = b; //+ 60;
//int d = ir_length;
char data_read[4]; //バッファーの定義
data_read[3] = 0;
data_read[2] = '0' + ( d - (DIV10(d) * 10) ); // '0'+(d%10)
d = DIV10(d);
data_read[1] = '0' + ( d - (DIV10(d) * 10) ); // '0'+(d%10)
data_read[0] = '0' + DIV10(d); // '0'+(d/10)
pc_putc(data_read[0]);
pc_putc(data_read[1]);
pc_putc(data_read[2]);
pc_putc('\r');
pc_putc('\n');
*/
int sensorValue; //センサーの読み取り値
int Voltage; //電圧
int ir_length; //長さ
//アナログ値の読み込み 0から4096
sensorValue = (adc_vbat.read_u16()>>4);
//sensorValue = 1024;
//sensorValue = 2854; // debug 100mm
//アナログ値を電圧に変換
Voltage = (sensorValue * 3300) >> 12; //stm32 (s*3300)/4096
//Voltage = 2300; //debug 100mm
ir_length = ir_len_i(Voltage);
if ( ir_length <= 199 ) {
b = ir_length - 60;
} else {
b = (unsigned char)( DIV10(ir_length)-20+140 );
}//endif
//0.5秒の待ち
//wait_ms(500);
}//rx_Event
//容量削減
void error(const char* format, ...) {}
Arduino UNOのマスター
#include <Arduino.h>
#include <SoftwareSerial.h>
SoftwareSerial mySerial(2, 3); // RX, TX
//初期化
void setup()
{
//シリアルポートの初期化
Serial.begin(9600);
//ソフトウェアシリアルの初期化
mySerial.begin(9600);
} //setup
//メインループ
void loop()
{
int l; //距離
unsigned char b = 200;
//読み込み
mySerial.print("S");delay(5); //トリガーを投げる
while( mySerial.available() ){
//Serial.println( mySerial.available() );//debug
b = mySerial.read();//受信
//Serial.println( b );//debug
}//while
if( b <= 0 ) b=0;
if( b >= 200 ) b=200;
//レンジ圧縮 140までは、mm 140からは、cm
if( b <= 139 ) {
l = b + 60;
} else {
l = ((int)(b - 140 + 20)) * 10;
}
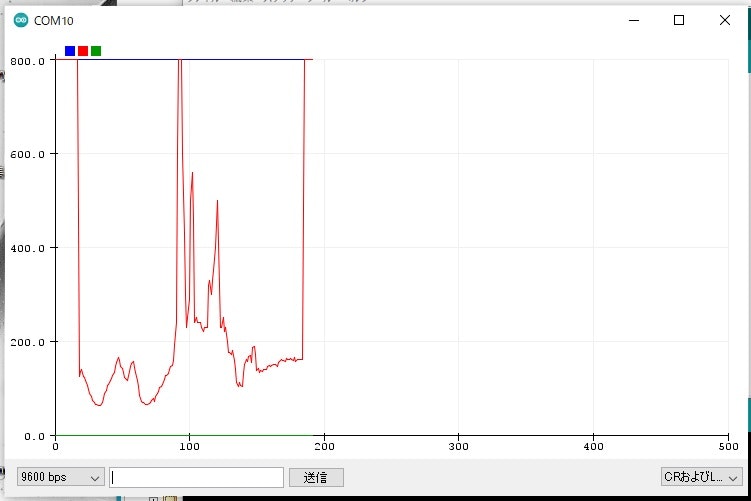
Serial.print("800,");
Serial.print( l ); //UNO
Serial.print(",0");
Serial.println(" ");
delay(500); // 0.5秒の待ち
} //loop