秋月電子の3軸加速度センサモジュール LIS3DHをSPI通信を用いてESP32で使用してみる.
前提
MicroPythonを使用する.
センサー
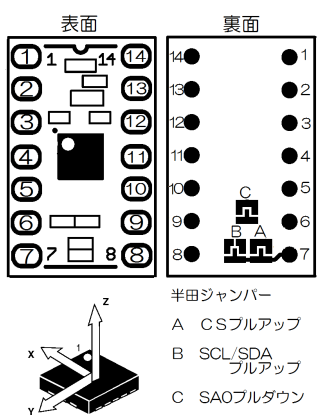
LIS3DHを使用する場合, 裏面のジャンパーを使用方法に応じて半田を行う必要がある.
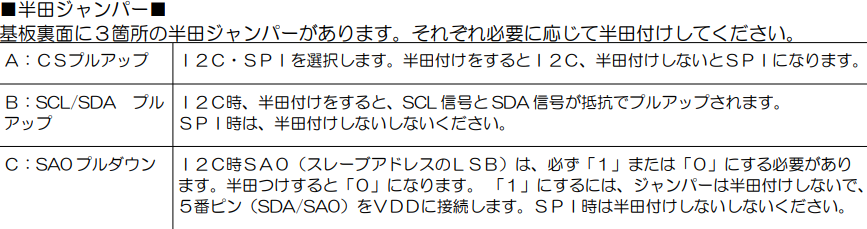
LIS3DHのデータシートから引用
今回はI2Cを用いるのと, ESP32のSCL, SDAを使用するためBジャンパを半田する
LIS3DHのデータシートから引用
↓Bジャンパに半田をした状態
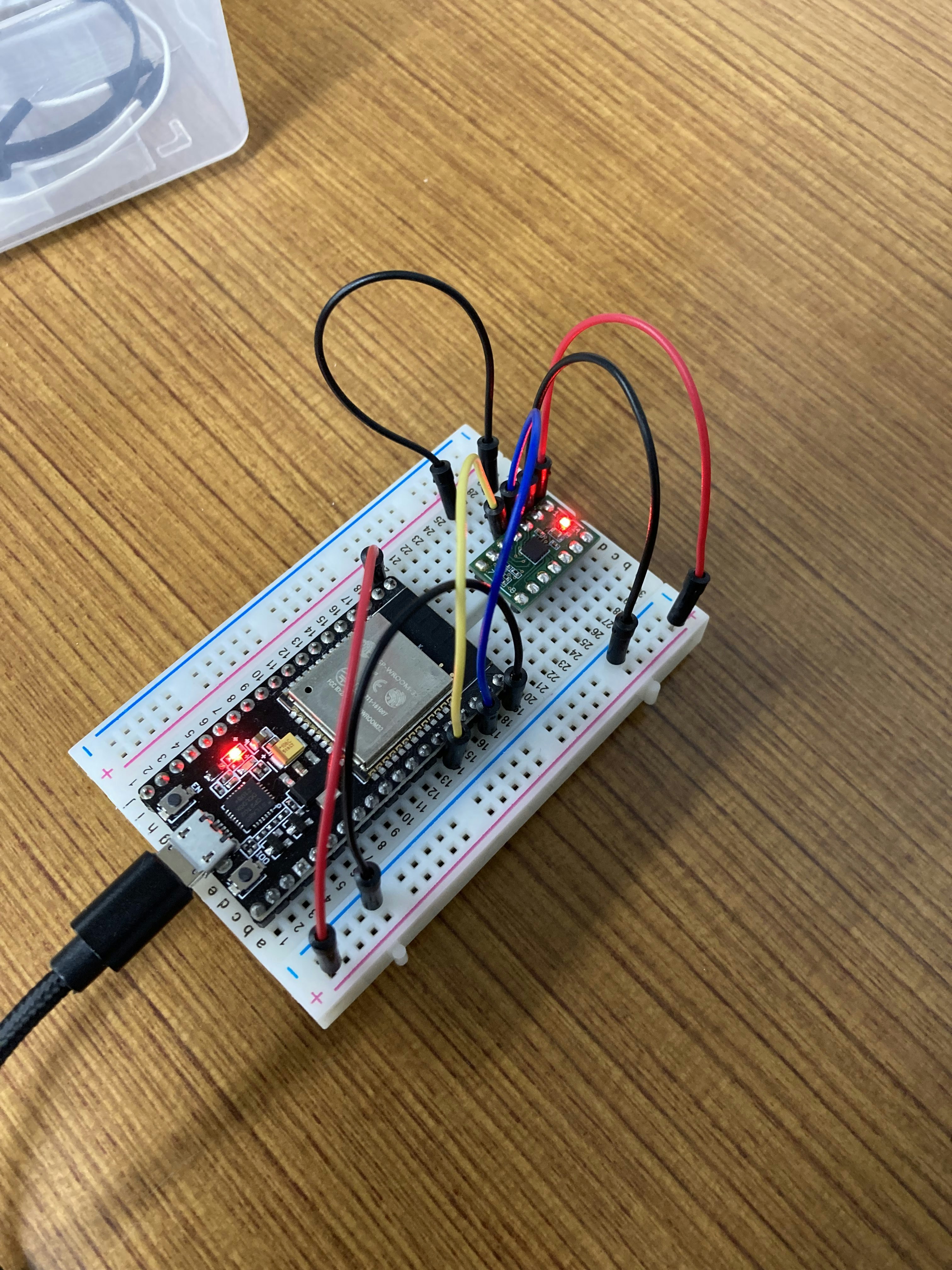
配線

この図のようにします.
VCCを3.3Vに, GNDをGNDに, SCLとSDAをESP32のそれぞれの同名のピンの所につなげます.
以下が実機の配線になります.
プログラム
コードは初心者のためのセンサと測定入門のI2C通信プログラムのRaspberry Pi用のコードをESP32で使えるようにしたコードになります.
LIS3DH.py
import time
import utime
import math
import machine
from machine import Pin, I2C
#I2C設定
i2c = I2C(scl=Pin(22), sda=Pin(21), freq=100000)
address = 0x18
#address = 0x1A
#LIS3DH設定
i2c.writeto_mem(address, 0x20, bytes([0x57]))
#i2c.writeto_mem(address, 0x23, bytes([0x08]))
while True:
#データ読み込み
xl = i2c.readfrom_mem(address, 0x28, 1)[0]
xh = i2c.readfrom_mem(address, 0x29, 1)[0]
yl = i2c.readfrom_mem(address, 0x2A, 1)[0]
yh = i2c.readfrom_mem(address, 0x2B, 1)[0]
zl = i2c.readfrom_mem(address, 0x2C, 1)[0]
zh = i2c.readfrom_mem(address, 0x2D, 1)[0]
#データ変換
out_x = (xh << 8 | xl) >> 4
out_y = (yh << 8 | yl) >> 4
out_z = (zh << 8 | zl) >> 4
#極性判断
if out_x >= 2048:
out_x -= 4096
if out_y >= 2048:
out_y -= 4096
if out_z >= 2048:
out_z -= 4096
#物理量(加速度)に変換
out_x = out_x / 1024
out_y = out_y / 1024
out_z = out_z / 1024
#表示
print('X: ' + str(out_x))
print('Y: ' + str(out_y))
print('Z: ' + str(out_z))
#一時停止
time.sleep(1)