はじめに
こんにちは,高校でロボットを制作したりしているBasalteと申します.
今回はROS2を使ってオーバースペックな傘を作ってみた,というお話です.
相方と2人で制作しました.許可をもらって公開しています.
目的
このプロジェクトは気象観測機器コンテストという,高専,高校向けのコンテストのために制作しました.
(最終審査まで行くと南極船しらせに乗ることができるなど,面白くておすすめのコンテストです.地学研究をメインとしたものや,"機器"の製作に振っているものなど,幅広い作品が見られます.今回私たちはがっつり後者に分類されるかと思います.)
制作テーマ
今回私たちは「小型風向速計測器の制作とその応用」というテーマで,風向風速センサーの自作と,それを用いた自動回転傘の製作という2本立てとしました.
最初はノリだけで応募し,どうして予選を通過したかはよくわかりません.
自作風向風速センサ
この作品のキモである自作の風向風速センサについて解説します.
これは相方が製作したのですが,4方向の双方向,計8方向の風速を曲げセンサによって取得し,その平均から吹いている風のベクトルを求めることができます.
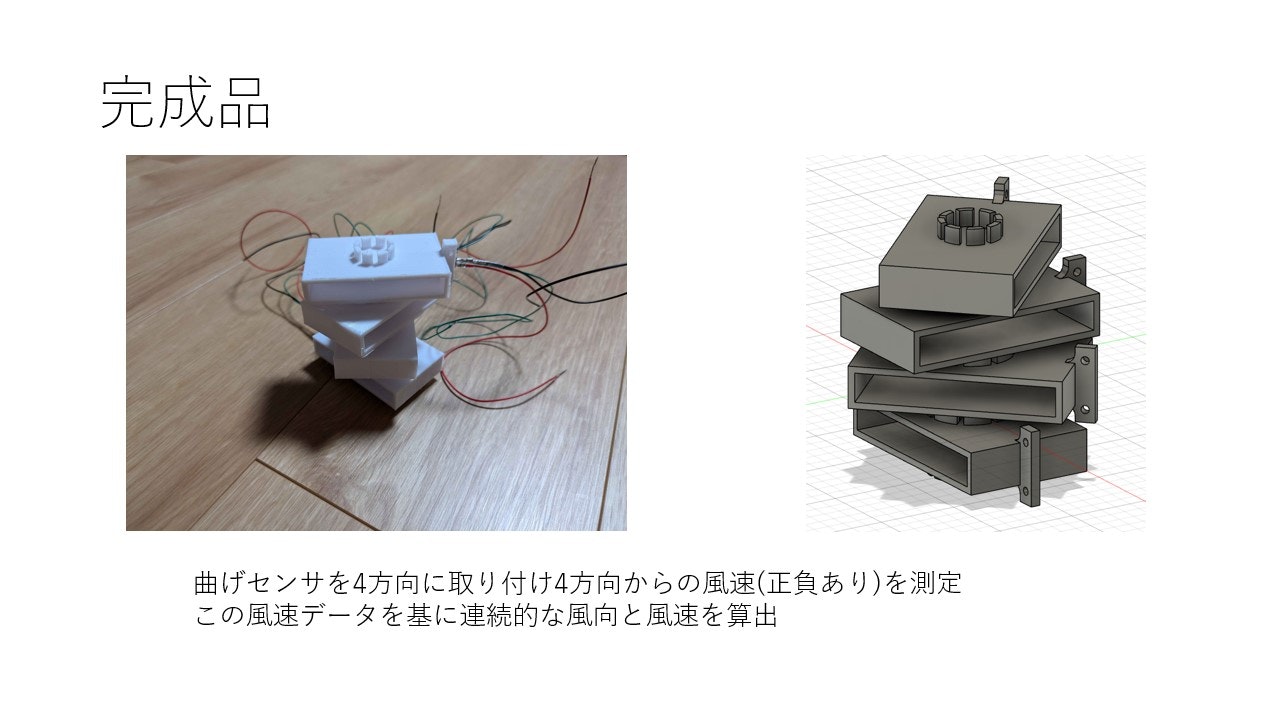
これまでの風向風速センサはプロペラの回転数で風速を計測したり,風によって回転することで風向を計測したりするものがメインでした.しかしそれらは大きく重くなるほか,回転するために消耗していきます.
私はこのリポジトリでこのセンサをROS2化しました.micro-rosをesp32で走らせています.
https://github.com/basalte1199/micro-ros-esp32-kisyou
Float32MultiArrayで[radian,speed]をPublishするようになっています.
自動回転傘
なんの変哲もないパンチルト機構で,2自由度で傘を動かします.
下部の自作風向風速センサで取得した風の角度をPanに,風速をTiltに反映しています.
特別な点として,ROBOTIS Dynamixelの直交2軸サーボを使用しています.
こちらはパンチルト機構を一つで使うことができ,とても便利です.(自律移動ロボットから一時的に剥ぎ取りました)
https://e-shop.robotis.co.jp/product.php?id=296
自作センサからDynamixelまですべてROS2で動かしています.とても無駄ですね.ただROS2を使ったことでロボット用に開発していたコードをたくさん使いまわす事ができ,なんとか締め切りに間に合わすことが出来ました.
こちらが動作映像になります.
綺麗に風向きに追従してくれていることがわかります.
分かりにくいですが,風が吹き始めてからTilt角が降りて行っています.
気象観測機器コンテストのために製作している作品です!
— basalte(ばざると) (@basalte1199) December 15, 2024
自作の風向風速センサと自動回転傘で雨を完全に防ぐというものです! pic.twitter.com/7TPNS05Ter
最後に
自分の技術力不足,コミュニケーション力不足から相方には多大なる迷惑をかけてしまいました.本当に申し訳ないと思っています.
ただ同時にある程度形にして残すことができたことも嬉しく思います.
新規性全振りの面白いことができたんではないかと思います.相方をはじめとした協力してくださったみなさん,ありがとうございました.