概要
鉄道模型をマイコン制御してやろうと思われている皆さん、こんにちは。綾瀬です。ESP-WROOM-02を使って鉄道模型を制御してきたことをまとめていくシリーズの第4回の今回は、無線LANで接続したデバイス(タブレット端末やスマートフォンなど)から鉄道模型車両を遠隔制御するために、前回ESP-WROOM-02に構築したWebサーバにWebAPIを実装してみたいと思います。
今回実装するWebAPIは、無線LAN内蔵SDカードである東芝FlashAirのWebAPIと互換性を持たせます。これは、私がこれまでFlashAirを使って製作した鉄道模型制御装置と、クライアントアプリを共用できるようにするためです。
本シリーズの過去記事は以下を参照してください。
第1回
第2回
第3回
構成
ハードウェア構成
今回は第2回で製作した構成をそのまま使います。
ソフトウェア構成
今回構築するソフトウェアの構成を簡単なイラストで示します。
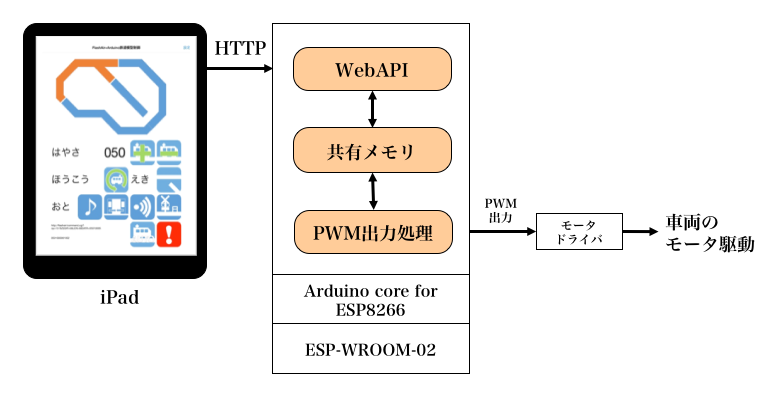
第3回の記事で作成したのは、このイラストのWebAPIを作成するための土台であるWebサーバを構築しました。今回は、ここにWebAPIを実装します。
WebAPIでは制御コマンドを受け取って、そのままPWM出力しても良いのですが、FlashAirのWebAPI互換とするため、今回は共有メモリ領域を確保し、ここにステータス情報を定義します。ステータス情報には、速度値と進行方向を設けます。

このステータス情報を、WebAPIから変更できるようにします。PWM出力処理は、周期的にステータス情報を参照して、変化に応じてPWM出力処理を行うようにします。
こうすることで、WebAPIで制御コマンドを受け取る処理とPWM出力処理を非同期に処理することができます。
WebAPIの仕様
今回作成するWebAPIは、共有メモリ領域のステータス情報を変更するものとします。ついでにステータス情報を参照できるようにもします。WebAPIの仕様は、FlashAirのWebAPI互換とします。
FlashAirのAPIリファレンスは、FlashAir Developersで公開されています。今回、互換性を持たせるAPIは、command.cgi内の以下のAPIです。
準備
前回同様、ESP-WROOM-02をArduino化して使用します。そのため、Arduino core for ESP8266をあらかじめArduino IDEに組み込んでおきます。
ソースコード
前回実装したWebサーバのソースコードに以下の実装をします。
- 共有メモリ領域shaerdMemを定義
- setup関数内で共有メモリ領域shaerdMemを初期化
- 共有メモリの書き込み/読み出しのWebAPIであるhandleCommand関数の処理を実装
- 第2回で実装したPWM出力制御処理を追加
- 共有メモリ上のステータス情報を参照し、変化があれば処理を行うshaerdMemCheck関数を実装
- loop関数にWebサーバの接続要求待ちを定義
- loop関数にshaerdMemCheck関数の呼び出しを定義
# include <ESP8266WiFi.h>
# include <WiFiClient.h>
# include <ESP8266WebServer.h>
/*---------------------------------------------------------------------------
//定数定義
---------------------------------------------------------------------------*/
ESP8266WebServer server(80); //Webサーバの待ち受けポートを標準的な80番として定義します
String shaerdMem; //共有メモリを定義
const int shareMenSize = 512;//共有メモリのサイズを定義
const int pwmPinR = 4; //PWM出力ピンをIO4で定義(Cerevoのブレイクアウトボードでは10番ピン)
const int pwmPinL = 5; //PWM出力ピンをIO5で定義(Cerevoのブレイクアウトボードでは14番ピン)
int status_speed = 0; //速度の情報
int status_run_lr = 0; //進行方向の情報
/*---------------------------------------------------------------------------
//サーバリクエスト受信時の正常処理 ルート
---------------------------------------------------------------------------*/
void handleRoot() {
//ルートにアクセスされた時の処理を書く。
//ここではESP8266で応答していることと、ESP8266が接続しているアクセスポイントから取得したIPアドレスを返す。
//DHCPでIPを取得している場合に便利。
IPAddress myAddr = WiFi.localIP();
String mes = "hello from esp8266! IP address:" + String(myAddr[0]) + "." + String(myAddr[1]) +"." + String(myAddr[2]) +"." + String(myAddr[3]) + "\n";
server.send(200, "text/plain", mes);
}
/*---------------------------------------------------------------------------
//サーバリクエスト受信時の正常処理 command.cgi
//
//共有メモリへのデータ書き込み要求
//GET /command.cgi?op=131&ADDR=0&LEN=8&DATA=01234567 HTTP/1.1
//op: 131がデータ書き込みを示す
//ADDR:書き込み開始位置、LEN:書き込みデータの長さ、DATA:書き込むデータ
//共有メモリからデータ読み出し要求
//GET /command.cgi?op=130&ADDR=0&LEN=8 HTTP/1.1
//op: 130がデータ読み出しを示す
//ADDR:読み出し開始位置、LEN:読み出しデータの長さ
---------------------------------------------------------------------------*/
void handleCommand() {
if(server.method() != HTTP_GET) return;
String rtnStr = "ERROR";
String command_cmd;
String command_addr;
String command_len;
String command_data;
for (uint8_t i=0; i<server.args(); i++){
String strCMD = server.argName(i);
if(strCMD == "op"){
command_cmd = server.arg(i);
}
else if(strCMD == "ADDR"){
command_addr = server.arg(i);
}
else if(strCMD == "LEN"){
command_len = server.arg(i);
}
else if(strCMD == "DATA"){
command_data = server.arg(i);
}
}
if(command_cmd == "130"){
char pbuf[4];
command_addr.toCharArray(pbuf, sizeof(pbuf));
int iPos = atoi(pbuf);
command_len.toCharArray(pbuf, sizeof(pbuf));
int iLen = atoi(pbuf);
if(iPos >= shareMenSize){
server.send(200, "text/plain", rtnStr);
return;
}
if(iLen > shareMenSize - iPos) iLen = shareMenSize - iPos;
rtnStr = shaerdMem.substring(iPos, iPos + iLen);
}
else if(command_cmd == "131"){
String leftShaerdMem;
String rightShaerdMem;
char pbuf[4];
command_addr.toCharArray(pbuf, sizeof(pbuf));
int iPos = atoi(pbuf);
command_len.toCharArray(pbuf, sizeof(pbuf));
int iLen = atoi(pbuf);
int iLenData = command_data.length();
if(iPos >= shareMenSize){
server.send(200, "text/plain", rtnStr);
return;
}
if(iLen > shareMenSize - iPos) iLen = shareMenSize - iPos;
if(iLenData < iLen){
iLen = iLenData;
}
for(int idx = iPos; idx < iPos + iLen; ++idx){
shaerdMem.setCharAt(idx, command_data[idx - iPos]);
}
rtnStr = "SUCCESS";
}
server.send(200, "text/plain", rtnStr);
return;
}
/*---------------------------------------------------------------------------
//サーバリクエスト受信時の異常処理
---------------------------------------------------------------------------*/
void handleNotFound(){
String message = "File Not Found\n\n";
message += "URI: ";
message += server.uri();
message += "\nMethod: ";
message += (server.method() == HTTP_GET)?"GET":"POST";
message += "\nArguments: ";
message += server.args();
message += "\n";
for (uint8_t i=0; i<server.args(); i++){
message += " " + server.argName(i) + ": " + server.arg(i) + "\n";
}
server.send(404, "text/plain", message);
}
/*---------------------------------------------------------------------------
//初期化処理
---------------------------------------------------------------------------*/
void setup() {
Serial.begin(115200);
delay(10);
pinMode(pwmPinR, OUTPUT); //PWM出力ピン1を出力に定義
pinMode(pwmPinL, OUTPUT); //PWM出力ピン2を出力に定義
analogWrite(pwmPinR, 0); //PWM出力ピン1の出力値を0に定義
analogWrite(pwmPinL, 0); //PWM出力ピン2の出力値を0に定義
status_speed = 0; //速度情報を0に初期化
status_run_lr = 0; //進行方向情報を0に初期化
for(int idx = 0; idx < shareMenSize; idx++){
shaerdMem[idx] = '0'; //共有メモリを初期化
}
//自分のSSIDとパスコードを設定する
//mySSIDとmyPassは任意のものに書き換えること
Serial.println("WiFi module setting... ");
WiFi.softAP("mySSID", "myPass");
Serial.print("IP address: ");
Serial.println(WiFi.softAPIP());
//アクセスポイント(myAPSSID)に接続する(20回接続要求して失敗したらエラー表示)
//myAPSSIDとmyAPPassは自分の環境のものに書き換えること
Serial.print("Connecting to ");
WiFi.begin("myAPSSID", "myAPPass");
int retry_sum = 0;
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
retry_sum++;
if(retry_sum > 20) break;
}
if(WiFi.status() == WL_CONNECTED){
Serial.println("WiFi connected");
Serial.print("IP address: ");
Serial.println(WiFi.localIP());
}
else{
Serial.println("WiFi not connected");
}
//Webサーバの設定を行い、サーバを起動する
server.on("/", handleRoot); //ルートに接続要求があった時の処理を指定
server.on("/command.cgi", handleCommand); //command.cgiに接続要求があった時の処理を指定
server.onNotFound(handleNotFound); //設定外に接続要求があった時の処理を指定
server.begin(); //Webサーバを起動
Serial.println("HTTP server started");
}
/*---------------------------------------------------------------------------
//PWM出力制御
//speed_num: 速度(0〜200)
//LR: 1:右方向 0:左方向
---------------------------------------------------------------------------*/
void funcspeed_run(int speed_num, int LR){
if(status_speed == speed_num && status_run_lr == LR) return;
if(speed_num < 0 || speed_num > 200) return;
int speed_setnum = speed_num;
if(speed_setnum > 0) speed_setnum = speed_setnum + 50;
if(LR == 1){
status_run_lr = 1;
analogWrite(pwmPinR, speed_setnum*4);
analogWrite(pwmPinL, 0);
}
else{
status_run_lr = 0;
analogWrite(pwmPinR, 0);
analogWrite(pwmPinL, speed_setnum*4);
}
status_speed = speed_num;
}
/*---------------------------------------------------------------------------
//共有メモリをチェックする
//shaerdMem [ 0000 0000 ]
//先頭から3文字が速度情報(000〜200)、4文字目が進行方向(1:右方向、0:左方向)を示す。
---------------------------------------------------------------------------*/
void shaerdMemCheck(){
String tmpStr;
char pbuf[4];
tmpStr = shaerdMem.substring(0, 3);
tmpStr.toCharArray(pbuf, sizeof(pbuf));
int target_speed = atoi(pbuf);
tmpStr = shaerdMem.substring(3, 4);
if(tmpStr == "1"){
funcspeed_run(target_speed, 1);
}
else{
funcspeed_run(target_speed, 0);
}
}
/*---------------------------------------------------------------------------
//本体処理
---------------------------------------------------------------------------*/
void loop() {
server.handleClient(); //Webサーバの接続要求待ち
shaerdMemCheck(); //共有メモリのステータス情報を参照し変化があれば処理を行う
}
まとめ
以上の通り、ESP-WROOM-02をArduino化して、WebAPIを実装しました。
WebAPIですので、ESP-WROOM-02に無線LANで接続したデバイスのブラウザからアクセスすることで、鉄道模型を制御することができます。
例えば、以下のURIでアクセスします。
http://192.168.4.1/command.cgi?op=131&ADDR=0&LEN=8&DATA=05010000
http://192.168.4.1/command.cgi?op=131&ADDR=0&LEN=8&DATA=08000000
http://192.168.4.1/command.cgi?op=131&ADDR=0&LEN=8&DATA=00010000
http://192.168.4.1/command.cgi?op=131&ADDR=0&LEN=8&DATA=00000000
http://192.168.4.1/command.cgi?op=130&ADDR=0&LEN=8
次回予告
次回は、今回作成したWebAPIを使って鉄道模型を制御するクライアントアプリを作成します。
参考資料
最後に宣伝
新刊原稿は無事入稿されました!事故がなければ、新刊出ますよ〜。
コミックマーケット89において、ESP-WROOM-02とFlashAirの電子工作における比較記事を掲載した電子工作(と酒)の同人誌を頒布します。ESP-WROOM-02とFlashAirで比較製作したGゲージ鉄道模型車両の遠隔制御装置の回路図も掲載しています。冬コミにお越しの際は、ぜひお寄りください。また、冬コミ後には通販でも入手できると思います。
12/31(木) 3日目 東メ-08a「空と月」
