概要
制御工学分野のカスケード構成についてまとめた。
具体的には"位置制御器のみ"と"位置制御器+速度制御"はどちらが良いのかについて。
結果、速度制御があったほうが制御帯域が広がり応答性が上がることを確認した
カスケード構成とは
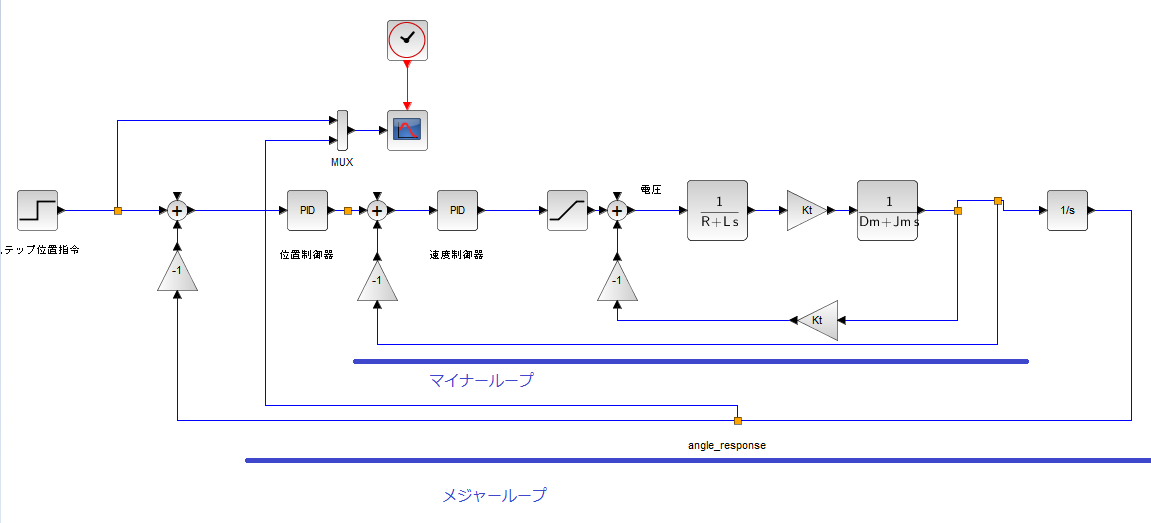
カスケード構成とはフィードバック制御において、メジャーループとマイナーループによって構成される構成である。
モータ制御で例えると
メジャーループ:位置制御ループ
マイナーループ:速度制御ループ
下図参照
使用ソフト
scilab ver6.02
速度制御器ありなしの位置応答の比較
"位置制御器のみ"でのモータ位置応答と"位置制御器+速度制御器"での位置応答を比較してみた
<速度制御なし>
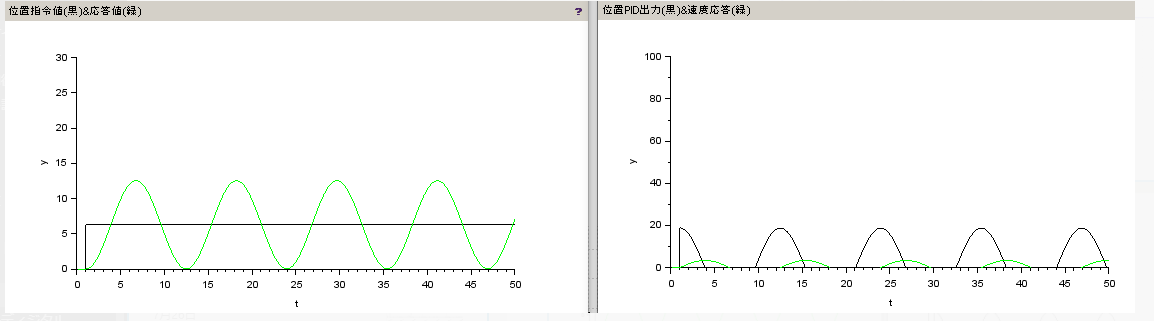
速度制御器の制御ブロック図とシミュレーション結果を示す。
(https://qiita-image-store.s3.ap-northeast-1.amazonaws.com/0/700308/388f2786-23ff-2edb-7228-4b375e73081b.png)
左―黒:位置指令(ステップ指令) 緑:位置応答 右-緑:位置PID出力 黒:速度応答
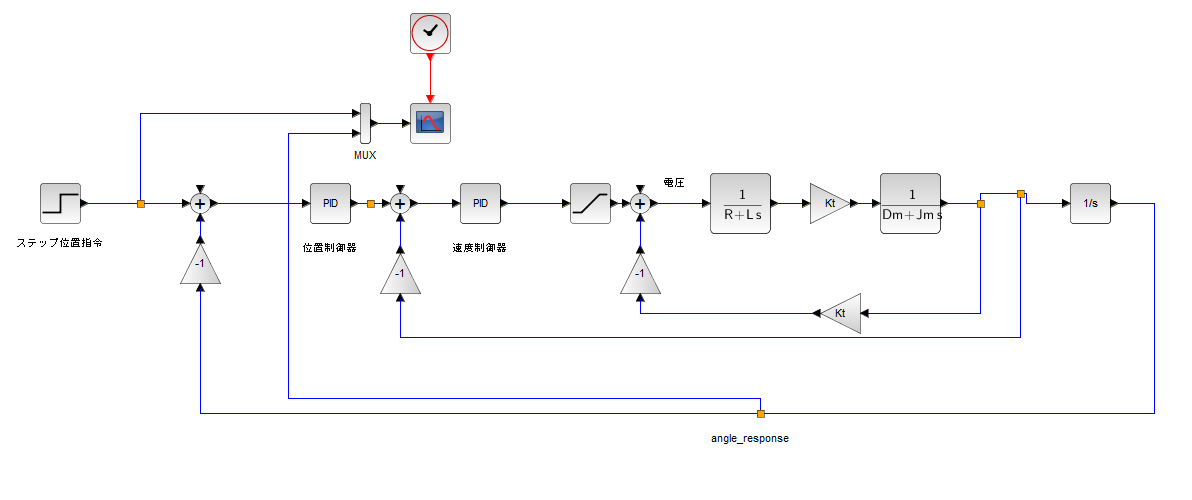
<速度制御あり>
位置制御器+速度制御器の制御ブロック図とシミュレーション結果を示す。
左―黒:位置指令(ステップ指令) 緑:位置応答 右-緑:位置PID出力 黒:速度応答
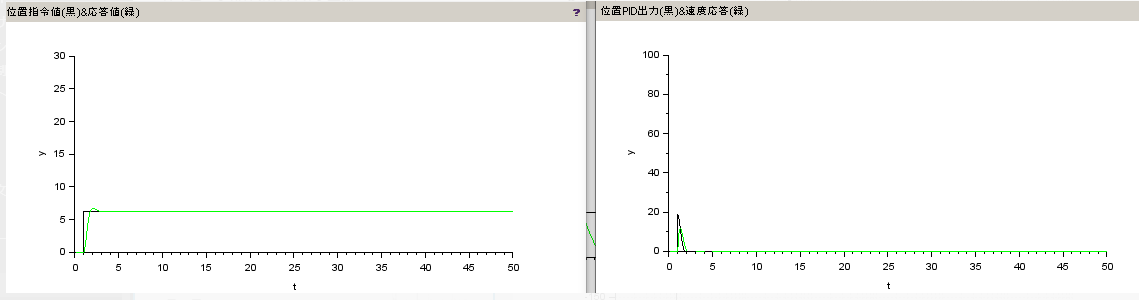
わかったこと
速度制御器ありでは位置応答が位置指令に追従している
速度制御器ありなしのボード線図比較
"位置制御器のみ"でのモータ位置応答と"位置制御器+速度制御器"でのボード線図比較してみた
ここでのボード線図は位置指令から位置応答までの周波数応答を見ている
<速度制御なし>
bode(Gc,1e-1,1e+5) ![image.png]
![image.png]
<速度制御あり>
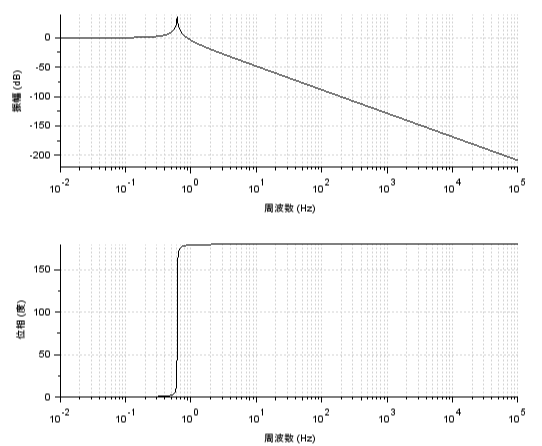
わかったこと
ボード線図より速読制御ありのほうが減衰する周波数が高い。つまりは指令値の周波数が高くても応答が減衰しない
結論
上記結果より
速度制御があったほうが制御帯域が広がるため制御性能が上がる