Donkey Simulator(Donkey Gym)は、Self Driving Sandbox(sdsandbox)をベースに作られているため、Unityなどのインストールが必要です。下記のサイトを参考にしながら、Ubuntu18.04を対象に書いてあります。
Unityインストール
下記サイトの「プロジェクトを作成する」の手前までの手順にしたがって、Unity Hub及びUnityのインストールを行う。
UbuntuでゲームエンジンのUnityをインストールする手順
Donkeycar on Linuxインストール
まだ、Donkeycarのインストールをやっていない場合には、ここで行っておく。condaの仮想環境donkey配下で構築。
シミュレーターのダウンロード&解凍
Donkey GymのRelease版(v18.9)をダウンロードし、解凍する。
~projects/DonkeySimLinuxが作成される。
sudo apt install curl
cd ~/projects
curl -OL https://github.com/tawnkramer/gym-donkeycar/releases/download/v18.9/DonkeySimLinux.zip
unzip DonkeySimLinux
Donkey Gymのセットアップ
cd ~/projects
git clone https://github.com/tawnkramer/gym-donkeycar
conda activate donkey
pip install -e gym-donkeycar
シミュレーター用のDonkeyフォルダを作成
donkey createcar --path ~/mysim
cd ~/mysim
myconfig.pyの編集
donkey gym simulator wrapperを有効化するために、以下の箇所をコメントアウトし、 DONKEY_SIM_PATHは自分の環境に合わせて変更する。
DONKEY_GYM = True
DONKEY_SIM_PATH = "/home/xxx/projects/DonkeySimLinux/donkey_sim.x86_64"
DONKEY_GYM_ENV_NAME = "donkey-generated-track-v0"
シミュレーターの起動
Ubuntuでは、実機で使っているジョイスティックを使うことができます。jstestなどで/dev/input/js0を確認してください。
python manage.py drive --js
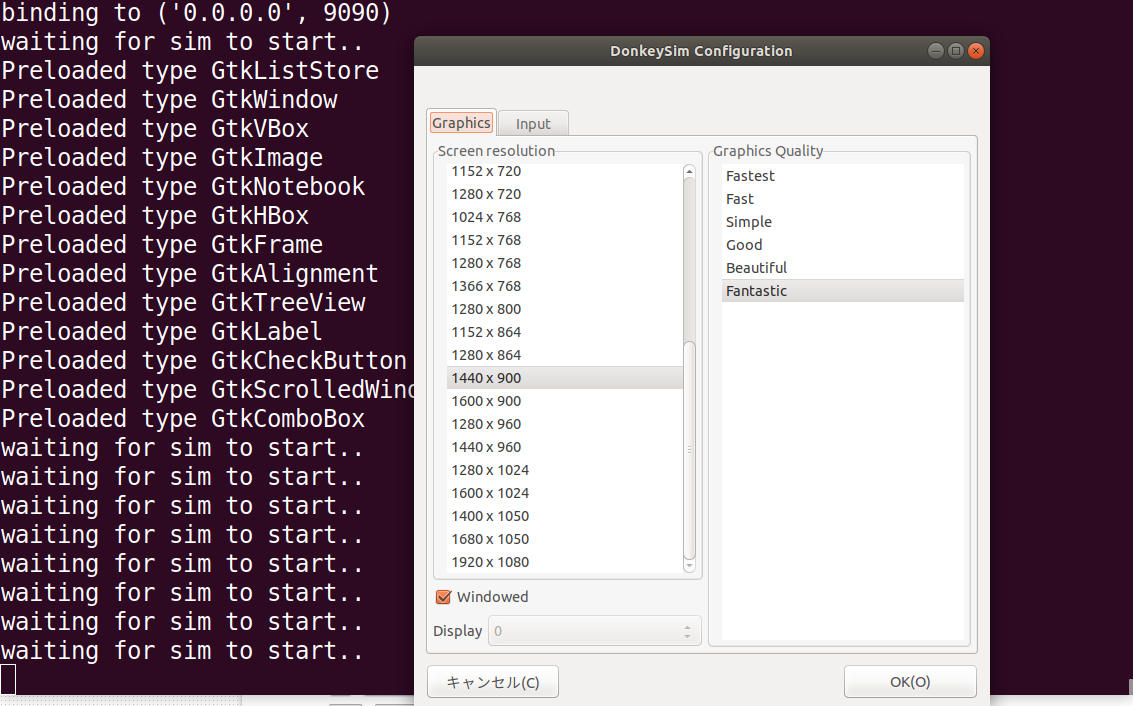
以下の画面が出るので、Screen resolutionやGraphics Qualityを自分の環境に合わせて実行します。
結び
実機があれば、シュミレーターは必要ないかなと思っていましたが、学習モデルの検証や初心者向けのタッチ&トライなど幅広く使えそうな感じがしてきました。
上記の手順により動くところまで持っていけると思います。