1.きっかけ
家に誰がいるか分かったらすごく便利だなとふと思ったことが始まり。
距離センサー(HC-SR04)を使ってLINEで通知させてみたかったので、靴があるかないかを判断して通知してくれるところまでを今回は作ってみました。
2.やりたいこと
★帰宅時と外出時にLINEに通知が欲しい ←今回やること
★誰が帰ってきたか知りたい(個人の識別)
★「おかえり」って言ってくれたら嬉しい
今回は、帰宅時と外出時にLINEに通知が行くようにしてみた。
3.配線
引用元:https://sozorablog.com/【raspberry-pi入門】
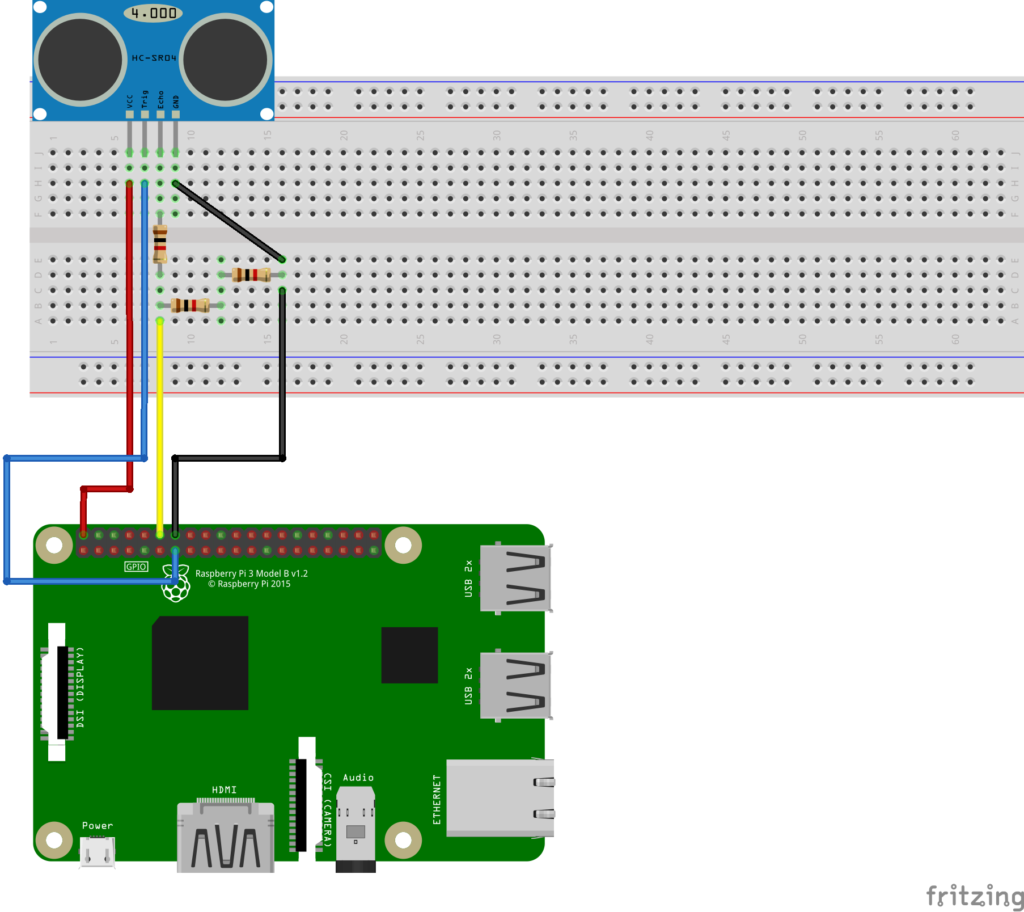
5Vから3.3Vに変換
RaspberryPiをHC-SR04を接続するには1つ注意点があります。HC-SR04がECHO端子から出力する電圧は5Vですが、ラズパイのGPIOピンは、3.3V用であるため、Echo信号をラズパイがそのまま受けると、GPIOが破損する恐れが…、そこで、抵抗器を用いて分圧します。
↓詳しくはこちらを参考にしてください。
http://make.bcde.jp/5vから3-3vに変換する/
4.コード
細かい説明はコメントの通り。
okaeri.py
#必要なモジュールをインポート
import RPi.GPIO as GPIO #GPIO用のモジュールをインポート
import time #時間制御用のモジュールをインポート
import sys #sysモジュールをインポート
import requests #repuestsモジュールのインポート
GPIO.setwarnings(False) #エラーが出てこないようにするため
#ポート番号の定義
Trig = 27 #変数"Trig"に27を代入
Echo = 18 #変数"Echo"に18を代入
#GPIOの設定
GPIO.setmode(GPIO.BCM) #GPIOのモードを"GPIO.BCM"に設定
GPIO.setup(Trig, GPIO.OUT) #GPIO27を出力モードに設定
GPIO.setup(Echo, GPIO.IN) #GPIO18を入力モードに設定
def okaeri(): #帰ってきたとき
send_line_notify('帰ってきました')
def itterasyai(): #出かけたとき
send_line_notify('出かけました')
def send_line_notify(notification_message):
"""
LINEに通知する
"""
line_notify_token = 'トークン'
line_notify_api = 'https://notify-api.line.me/api/notify'
headers = {'Authorization': f'Bearer {line_notify_token}'}
data = {'message': f'message: {notification_message}'}
requests.post(line_notify_api, headers = headers, data = data)
#HC-SR04で距離を測定する関数
def read_distance():
GPIO.output(Trig, GPIO.HIGH) #GPIO27の出力をHigh(3.3V)にする
time.sleep(0.00001) #10μ秒間待つ
GPIO.output(Trig, GPIO.LOW) #GPIO27の出力をLow(0V)にする
while GPIO.input(Echo) == GPIO.LOW: #GPIO18がLowの時間
sig_off = time.time()
while GPIO.input(Echo) == GPIO.HIGH: #GPIO18がHighの時間
sig_on = time.time()
duration = sig_on - sig_off #GPIO18がHighしている時間を算術
distance = duration * 34000 / 2 #距離を求める(cm)
return distance
#連続して値を超音波センサの状態を読み取る
while True:
try:
cm = read_distance() #HC-SR04で距離を測定する
print("distance=", int(cm), "cm") #距離をint型で表示
if cm > 2 and cm < 15: #距離が2~15cmの場合
okaeri() #okaeriの実行
time.sleep(60) #1分間待つ
else:
itterasyai() #itterasyaiの実行
time.sleep(60)
except KeyboardInterrupt: #Ctrl+Cキーが押された
GPIO.cleanup() #GPIOをクリーンアップ
sys.exit() #プログラム終了
6.おわりに
やっぱり個人特定はやりたいのでなんかいいアイディアないかな…