この記事の他にも,ロボティクスの辞書 に様々なロボティクスに関する記事をまとめていますので、よろしければそちらもご覧ください!
お疲れ様です。秋並です。
この記事では「ロボットアームの動作計画」について解説します。
動作計画とは
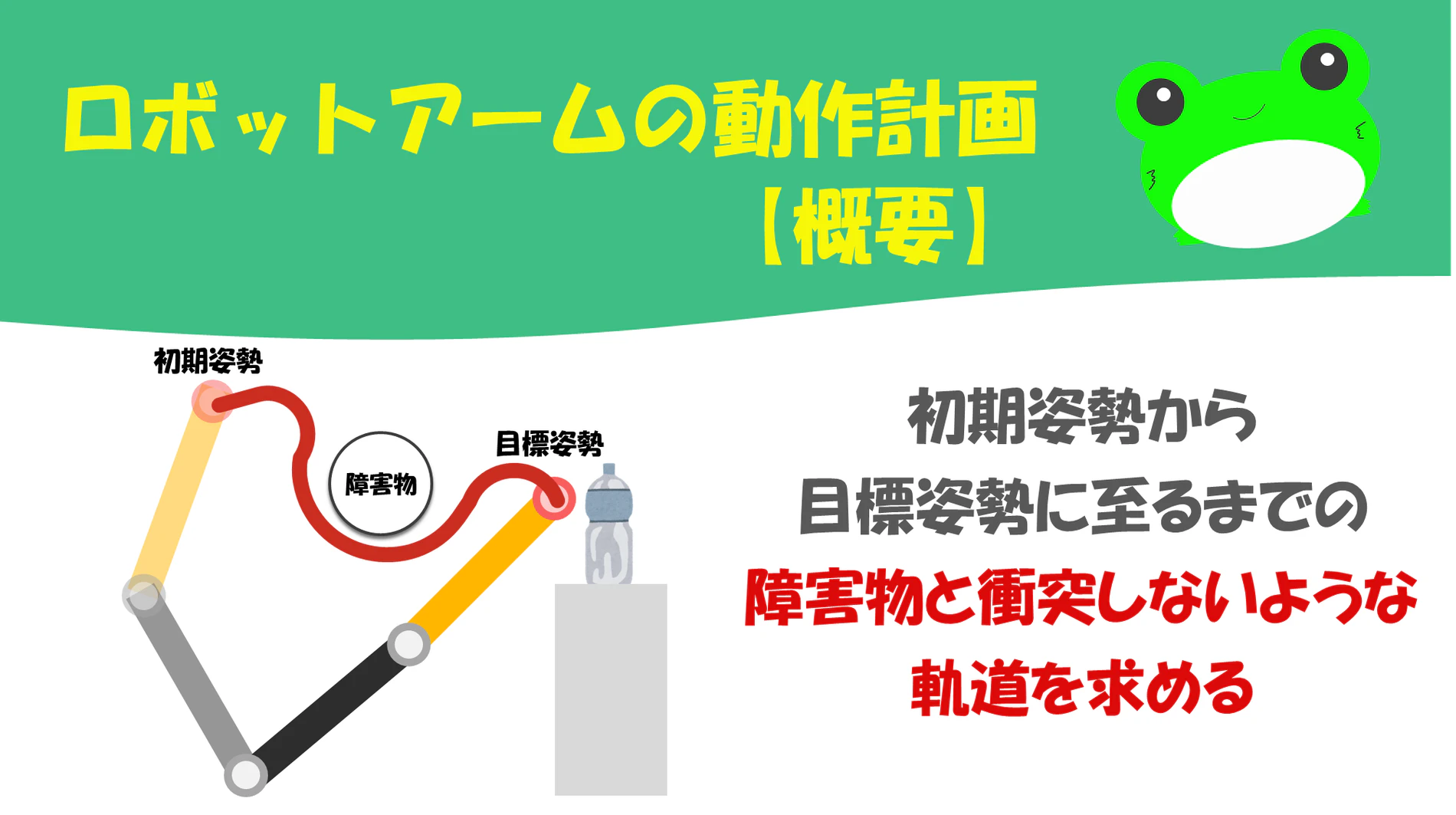
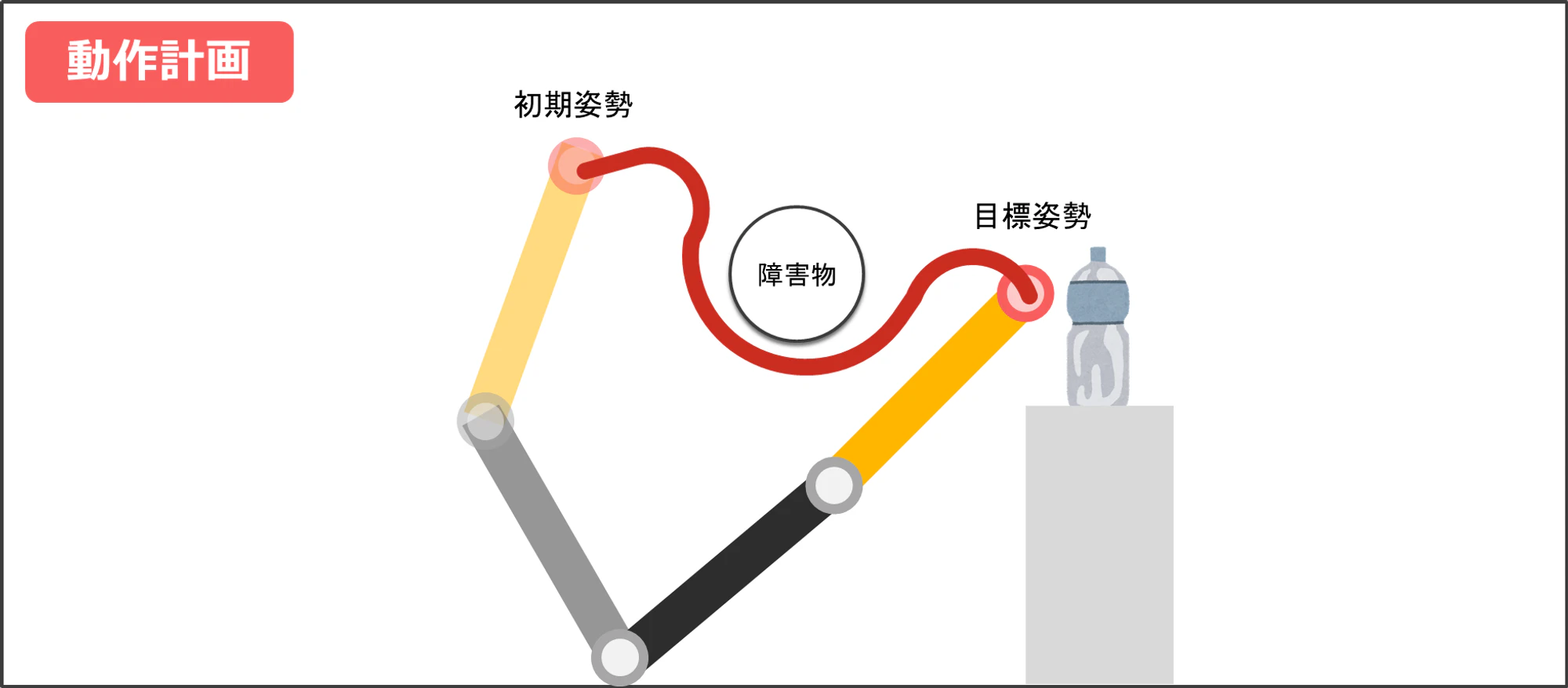
ロボットアームの動作計画 (motion planning) とは
- 障害物と衝突しないような「初期姿勢」から「目標姿勢」に至る動作を生成すること
になります。1
動作計画の解法
動作計画には、以下の2種類が存在します。詳細についてはリンク先の記事を参照ください。
最後に
今回は、ロボットアームの動作計画の概要について説明しました。
この記事が少しでも皆さんのお役に立てれば幸いです。
-
「動作計画」という言葉は「動作を計画する」という割と大雑把な単語なので、書籍や論文によっては意味合いが若干異なることがあります。今回紹介している「動作計画」の定義は一般的ではあると思いますが、あくまでこの記事内での定義であるということにご注意ください。 ↩