記事の内容
■ MLPを用いた時系列回帰
■ モデル:MLP ( PyTorch )
■ 学習データおよび検証データ
・伝達関数モデルを用いて学習用データおよび検証用データを作成
・学習用データ作成時の入力信号はChirp信号、検証用データ作成時の入力信号はStep信号
スクリプト
d08_Pytorch_MLP_Time_Sequence.ipynb
from control.matlab import*
import numpy as np
import torch
import torch.nn as nn
import torch.optim as optim
import matplotlib.pyplot as plt
from torch.utils.data import DataLoader, TensorDataset
torch.manual_seed(0);
#伝達関数モデル(学習データ作成用)の定義・・・システムが複雑になると予測精度が落ちる
s = tf('s')
P = 1/(0.5*s+1) #1次遅れ系
#P = 1/(1*s**2+2*s+1) #2次遅れ系
#シーケンス長・・・予測精度に大きな影響がある
#sequence_length = 2
#sequence_length = 16
sequence_length = 32
#sequence_length = 64
#学習用データと検証用データを作成するための入力信号の種類・・・予測精度に大きな影響がある
#1:Step信号、2:Chirp信号、3:白色ノイズ
train_data_type = 2
vali_data_type = 1
# -------入力信号の生成------------
duration = 100 # 信号の継続時間 (秒)
sampling_rate = 10 # サンプリングレート (Hz)
# 時間軸の作成
time = np.linspace(0, duration, int(sampling_rate * duration), endpoint=False)
print('time.shape', time.shape)
#-------------入力信号の生成---------
step_signal_type = 2
def if_elif(step_signal_type):
if step_signal_type ==1: #---Step信号---
step_time = duration/20 #ステップするタイミングをdurationの1/20毎とする
u = np.zeros_like(time)
for i in range(len(time)):
if (i // int(step_time * sampling_rate)) % 2 == 1:
u[i] = 1
return u
elif step_signal_type ==2: #---Chirp信号---
frequency_start = 0.01 # チャープ信号の開始周波数 (Hz)
frequency_end = 1 # チャープ信号の終了周波数 (Hz)
u = np.sin(2 * np.pi * np.cumsum(np.linspace(frequency_start, frequency_end, len(time)) / sampling_rate)) / 2 + 0.5
return u
else: #---白色ノイズ---
A = 1.0 # 振幅
u = 2*A*(np.random.rand(round(sampling_rate*duration))-0.5)
return u
u_train = if_elif(train_data_type)
u_vali = if_elif(vali_data_type)
#-----------lsimで出力(応答)計算---------
def calc_y(P, u, t):
x0 = 0 #初期値
y, time_tmp, x_tmp = lsim(P, U=u, T=t, X0=x0)
return y
y_act_train = calc_y(P,u_train,time)
y_act_vali = calc_y(P,u_vali,time)
#---------学習用データのグラフ表示---------
plt.figure(figsize=(10, 5))
#全体表示
plt.subplot(2, 1, 1)
plt.axhline(0, color="gray", linestyle="--", linewidth=1)
plt.plot(time, u_train, label="Input", color='b', linewidth=1)
plt.plot(time, y_act_train, linestyle="--", label="Output", color='r', linewidth=1)
#plt.xlabel("time (s)")
plt.ylabel("Signal [-]")
plt.title("Train data check")
plt.legend()
plt.grid(True)
#拡大表示
plt.subplot(2, 1, 2)
plt.axhline(0, color="gray", linestyle="--", linewidth=1)
plt.plot(time, u_train, label="Input", color='b', linewidth=1)
plt.plot(time, y_act_train, label="Output", color='r', linewidth=1)
plt.xlim(80,100)
plt.xlabel("time (s)")
plt.ylabel("Signal [-]")
#plt.title("Train data")
plt.legend()
plt.grid(True)
#---------検証用データのグラフ表示---------
plt.figure(figsize=(10, 5))
#全体表示
plt.subplot(2, 1, 1)
plt.axhline(0, color="gray", linestyle="--", linewidth=1)
plt.plot(time, u_vali, label="Input", color='b', linewidth=1)
plt.plot(time, y_act_vali, label="Output", color='r', linewidth=1)
plt.ylabel("Signal [-]")
plt.title("Validation data check")
plt.legend()
plt.grid(True)
#拡大表示
plt.subplot(2, 1, 2)
plt.axhline(0, color="gray", linestyle="--", linewidth=1)
plt.plot(time, u_vali, label="Input", color='b', linewidth=1)
plt.plot(time, y_act_vali, label="Output", color='r', linewidth=1)
plt.xlim(0,25)
plt.xlabel("time (s)")
plt.ylabel("Signal [-]")
#plt.title("Train data")
plt.legend()
plt.grid(True)
#---------時系列モデルの学習用および検証用データを作成(入力をシーケンス長毎のベクトルとする)---------
def create_sequences(x_org, y_org, seq_length):
xs, ys = [], []
for i in range(len(y_org) - seq_length + 1):
x = x_org[i:i+seq_length]
y = y_org[i+seq_length-1]
xs.append(x)
ys.append(y)
return np.array(xs), np.array(ys)
# 訓練データ
x_train, y_train = create_sequences(u_train, y_act_train,sequence_length)
y_train = y_train.reshape(-1, 1)
time_train = time[sequence_length-1:]
#検証データ
x_vali, y_vali = create_sequences(u_vali, y_act_vali,sequence_length)
y_vali = y_vali.reshape(-1, 1)
time_vali = time[sequence_length-1:]
# ---------Tensor型へ変換する---------
x_train = torch.tensor(x_train, dtype=torch.float32)
y_train = torch.tensor(y_train, dtype=torch.float32)
time_train = torch.tensor(time_train, dtype=torch.float32)
x_vali = torch.tensor(x_vali, dtype=torch.float32)
y_vali = torch.tensor(y_vali, dtype=torch.float32)
time_vali = torch.tensor(time_vali, dtype=torch.float32)
# ---------学習用シーケンスデータの確認---------
plt.figure(figsize=(10, 5))
plt.subplot(2, 1, 1)
plt.plot(time_train.numpy(), x_train.numpy()[:,0], label='x_train[:,0]', linewidth=1, color='cyan', linestyle="--")
plt.plot(time_train.numpy(), x_train.numpy()[:,sequence_length-1], label='x_train[:,sequence_length-1]', linewidth=1, color='b')
plt.plot(time_train.numpy(), y_train.numpy(), label='y_train', linewidth=1, color='r')
plt.title('Train data check')
plt.ylabel('X, Y')
plt.grid(True, linestyle='dotted')
plt.legend()
plt.subplot(2, 1, 2)
plt.plot(time_train.numpy(), x_train.numpy()[:,0], label='x_train[:,0]', linewidth=1, color='cyan', linestyle="--")
plt.plot(time_train.numpy(), x_train.numpy()[:,sequence_length-1], label='x_train[:,sequence_length-1]', linewidth=1, color='b')
plt.plot(time_train.numpy(), y_train.numpy(), label='y_train', linewidth=1, color='r')
plt.xlabel('Time[s]')
plt.ylabel('X, Y')
plt.grid(True, linestyle='dotted')
plt.legend()
plt.xlim(0,20)
plt.show()
# ---------検証用シーケンスデータの確認---------
plt.figure(figsize=(10, 5))
plt.subplot(2, 1, 1)
plt.plot(time_vali.numpy(), x_vali.numpy()[:,0], label='x_vali[:,0]', linewidth=1, color='cyan', linestyle="--")
plt.plot(time_vali.numpy(), x_vali.numpy()[:,sequence_length-1], label='x_vali[:,sequence_length-1]', linewidth=1, color='b')
plt.plot(time_vali.numpy(), y_vali.numpy(), label='y_vali', linewidth=1, color='r')
plt.title('Validation data check')
plt.ylabel('X, Y')
plt.grid(True, linestyle='dotted')
plt.legend()
plt.subplot(2, 1, 2)
plt.plot(time_vali.numpy(), x_vali.numpy()[:,0], label='x_vali[:,0]', linewidth=1, color='cyan', linestyle="--")
plt.plot(time_vali.numpy(), x_vali.numpy()[:,sequence_length-1], label='x_vali[:,sequence_length-1]', linewidth=1, color='b')
plt.plot(time_vali.numpy(), y_vali.numpy(), label='y_vali', linewidth=1, color='r')
plt.xlabel('Time[s]')
plt.ylabel('X, Y')
plt.grid(True, linestyle='dotted')
plt.legend()
plt.xlim(0,20)
plt.show()
# ---------MLPモデルの定義---------
hidden_units = 32
class MLP(nn.Module):
def __init__(self):
super(MLP, self).__init__()
self.fc1 = nn.Linear(sequence_length, hidden_units)
self.fc2 = nn.Linear(hidden_units, hidden_units)
self.fc3 = nn.Linear(hidden_units, 1)
def forward(self, x):
x = torch.relu(self.fc1(x))
x = torch.relu(self.fc2(x))
x = self.fc3(x)
return x
# ---------モデルのインスタンス作成---------
model = MLP()
criterion = nn.MSELoss()
optimizer = optim.Adam(model.parameters(), lr=0.01)
#---------モデルのサマリー表示---------
from torchinfo import summary
#summary(model=model)
summary(model=model,input_size=(1,sequence_length))
# ---------モデルの学習---------
num_epochs = 1000
for epoch in range(num_epochs):
model.train()
optimizer.zero_grad()
outputs = model(x_train)
loss = criterion(outputs, y_train)
loss.backward()
optimizer.step()
if (epoch+1) % (num_epochs/10) == 0:
print(f'Epoch [{epoch+1}/{num_epochs}], Loss: {loss.item():.10f}')
# ---------学習用データと検証用データの予測---------
model.eval()
with torch.no_grad():
y_train_pred = model(x_train)
y_vali_pred = model(x_vali)
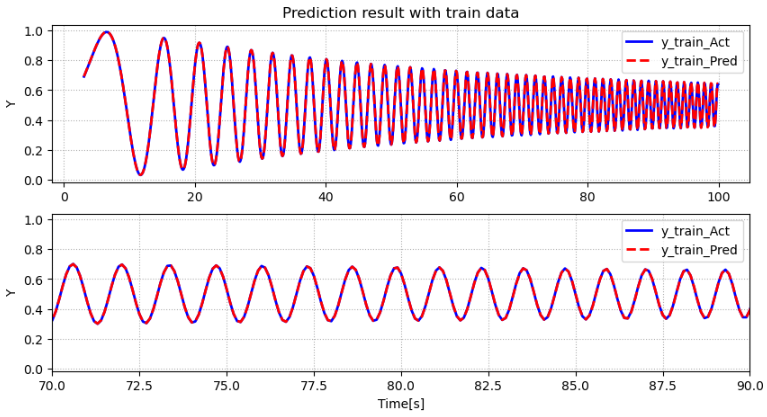
# ---------学習データにおける予測結果のプロット(時系列)---------
plt.figure(figsize=(10, 5))
plt.subplot(2, 1, 1)
plt.plot(time_train.numpy(), y_train.numpy(), label='y_train_Act', linewidth=2, color='b')
plt.plot(time_train.numpy(), y_train_pred.numpy(), label='y_train_Pred', linewidth=2, linestyle="--", color='r')
plt.title('Prediction result with train data')
plt.ylabel('Y')
plt.grid(True, linestyle='dotted')
plt.legend()
plt.subplot(2, 1, 2)
plt.plot(time_train.numpy(), y_train.numpy(), label='y_train_Act', linewidth=2, color='b')
plt.plot(time_train.numpy(), y_train_pred.numpy(), label='y_train_Pred', linewidth=2, linestyle="--", color='r')
plt.xlabel('Time[s]')
plt.ylabel('Y')
plt.grid(True, linestyle='dotted')
plt.legend()
plt.xlim(70,90)
plt.show()
# ---------検証データにおける予測結果のプロット(時系列)---------
plt.figure(figsize=(10, 5))
plt.subplot(2, 1, 1)
plt.plot(time_vali.numpy(), y_vali.numpy(), label='y_vali', linewidth=2, color='b')
plt.plot(time_vali.numpy(), y_vali_pred.numpy(), label='y_vali_Pred', linewidth=2, color='r', linestyle="--")
plt.title('Prediction result with validation data')
plt.ylabel('Y')
plt.grid(True, linestyle='dotted')
plt.legend()
plt.subplot(2, 1, 2)
plt.plot(time_vali.numpy(), y_vali.numpy(), label='y_vali', linewidth=2, color='b')
plt.plot(time_vali.numpy(), y_vali_pred.numpy(), label='y_vali_Pred', linewidth=2, color='r', linestyle="--")
plt.xlabel('Time[s]')
plt.ylabel('Y')
plt.grid(True, linestyle='dotted')
plt.legend()
plt.xlim(0,25)
plt.show()
# ---------予測結果のプロット(散布図)---------
plt.figure(figsize=(5, 5))
plt.scatter( y_train.numpy(), y_train_pred.numpy(), label='Train Data',s=10)
plt.scatter( y_vali.numpy(), y_vali_pred.numpy(), label='Vali Data',s=10)
plt.plot([0, 1], [0, 1], color='gray', label='1:1 line')
plt.title('Prediction result')
plt.xlabel('Y act')
plt.ylabel('Y pred')
plt.grid(True, linestyle='dotted')
plt.legend()
plt.show()
スクリプト実行結果
■ 学習用データに対する予測結果
学習用データに対する予測性能は問題なし。
■ 検証用データに対する予測結果
検証用データに対する予測性能も概ね問題なしだが、低次数のシステムでは発生しないノイズが見られる
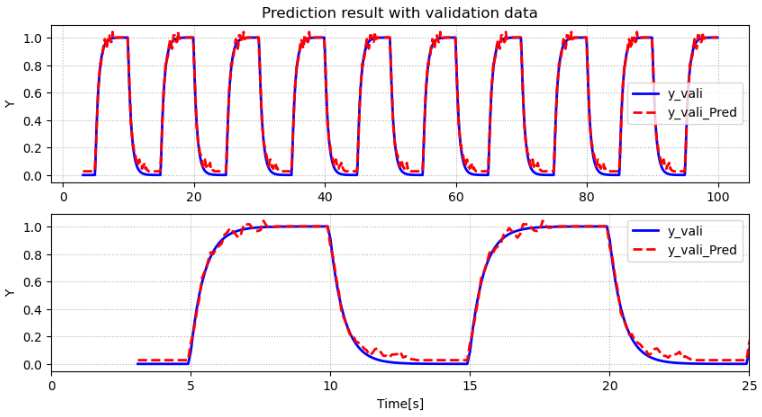
考察
学習自体は問題なくできていそう。
Step信号で作成した検証用データでは低次数システムではありえないノイズが発生している。RNNやLSTMでも同様のノイズが発生すると推定されるが確認する必要がある。CNNやNeural ODEでも同様のノイズが発生するかが今後の焦点。