はじめに
普段あまりRubyのコードを書くことが無いのでたまにはRubyのコードを書いてみます。
使用品
RBoard
E220-900T22S
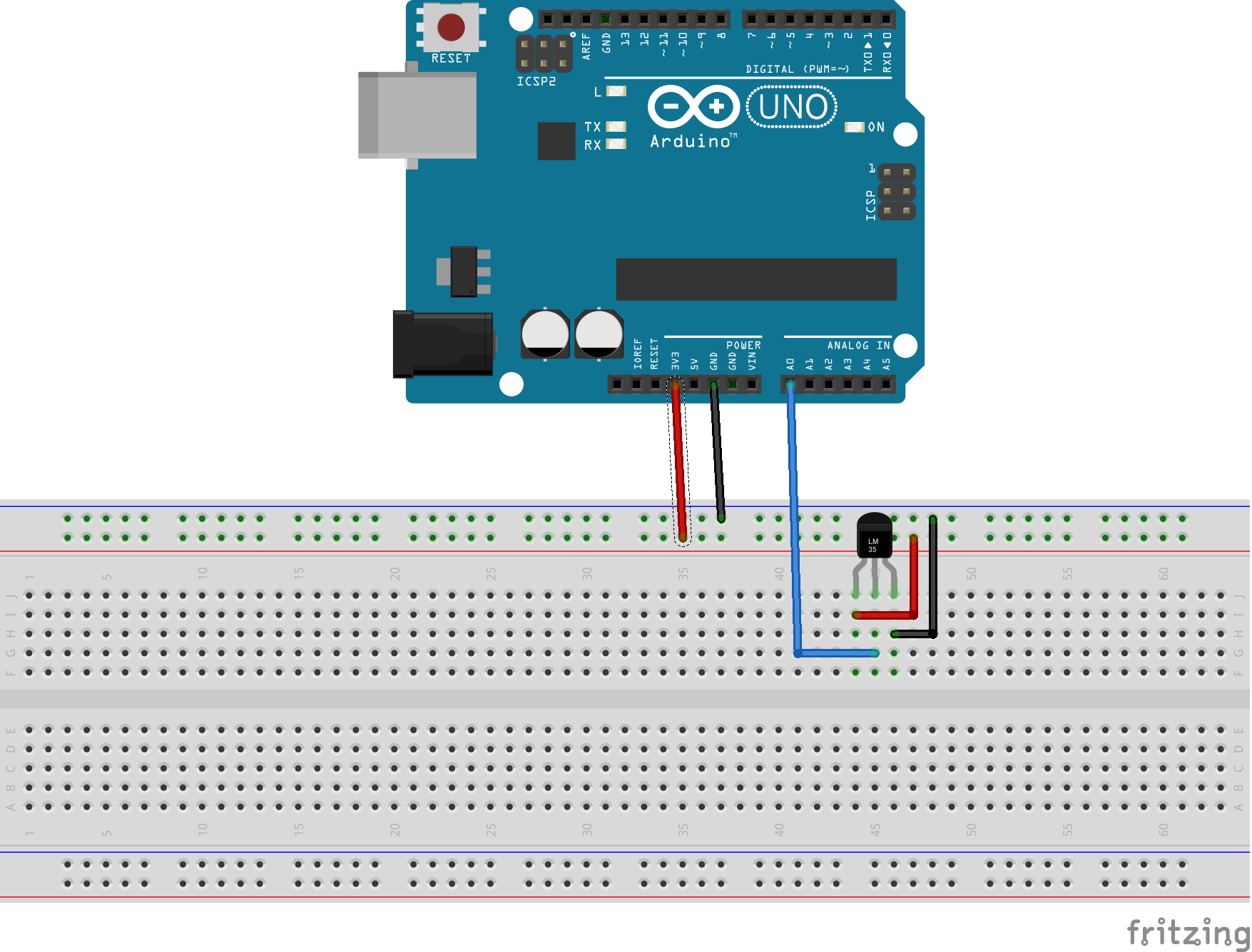
センサーにはLM61CIZを使用します。
LM61CIZを接続するためにブレッドボードとジャンパ線もあるといいです。
受信機には何かパソコンのようなものとE220のUSBモジュールを使用します。
RBoard
ファームを3.3.1へアップデートしてください。
MPLAB SNAPまたはpickitなどが必要です。
ファームを最新にした場合開発環境も最新のものを使用する必要があります。
と思ったけれど逆に最新のものしか提供されていなかった、、
E220-900T22S
出荷時のデフォルト値が00 00 62 00 0F 03 00 00となっています。
はじめの2バイトがアドレスなので初期状態では0です。
今回は1:1の送受信を予定しているので片方は必ずアドレスを変更する必要があります。
トランスペアレント送信モードと固定送信モードがあり1:1の通信をするためには固定送信モードにする必要もあります。
送信側をアドレス1で受信側をアドレス2へ設定しておきます。
C0 00 06 00 01 62 00 0F 43
C0:書き込み命令
00:スタートアドレス
06:書き込みバイト数
0001:アドレス1番
62000F:その他設定
43:0x40が固定送信モード

RBoardにプログラムを書き込んで設定します。
dev = UART.new( 2, rxd_pin:13, txd_pin:14, baud:9600 )
sleep(1) # E220の起動待ち
dev.write("\xC0\x00\x06\x00\x01\x62\x00\x0F\x43")
LM61CIZ
温度の値を電圧値で返してくれる扱いやすい温度センサーです。
0℃の時0.6Vの出力でマイナスの温度だったとしてもプラスの電圧値で出力してくれます。
(出力電圧[V] - 基準電圧[V]) * 100倍 = 温度[℃]
(0.85[V] - 0.6[V]) * 100 = 25℃
(0.35[V] - 0.6[V]) * 100 = -25℃
# 0番はLEDにつながってるので本当はお勧めしない
adc = ADC.new( 0 )
while true
v = adc.read()
temp = (v - 0.6) * 100
puts(temp)
sleep(1)
end
温度の送信プログラム
adc = ADC.new( 0 )
dev = UART.new( 2, rxd_pin:13, txd_pin:14, baud:9600 )
sleep(1) # E220の起動待ち
while true
v = adc.read()
temp = (v - 0.6) * 100.0
puts(temp)
send_txt = "\x00\x02\x0F"
bcd = sprintf("%04d", (temp * 100).to_i)
send_txt << bcd[0,2].to_i(16) << bcd[2,2].to_i(16)
dev.write(send_txt)
sleep(60)
end
受信側プログラム
今回ラズベリーパイを使用したのでたまたまライブラリがそろっていたpythonで書きます。
Rubyで書くとは、、
たぶんラップトップやデスクトップのPCでも同じコードで動くと思います。
import serial
import binascii
from serial.tools import list_ports
ports = list_ports.comports()
devices = [ info.device for info in ports ]
print( devices )
ser = serial.Serial(devices[0], 9600)
while( True ):
byte_txt = ser.read( 2 )
txt = binacii.hexlify( byte_txt )
data_txt = txt.decode("ASCII")
print("temp : " + data_txt[0:2] + "." + data_txt[2:4])