#プログラミング ROS2< LiDAR(YDLIDAR) >
はじめに
ROS2(バージョンアップしたROS)を難なく扱えるようになることが目的である.その第8弾として,「LiDAR(YDLIDAR)」を扱う.
環境
コンピュータ
| デバイス | raspberry pi 4 Model B |
| メモリ | 3.7 GiB |
| Graphics | llvmpipe (LLVM 13.0.1, 128 bits) |
| OS | Ubuntu |
Ubuntu
| リリース | 22.04.1 LTS 64ビット |
| カーネル | Linux 5.15.0-1015-raspi arm64 |
ROS2
| Distribution | Humble |
Raspberry Piも他のPCと一括して管理できるようにTeamViewerでリモートアクセスを可能にしたが,
その時の話はまた今度.
LiDAR
| メーカー | YDLIDAR |
| シリーズ | X2 |
ROSでYDLIDARを扱う
過去の記事では,ROS1(Noetic)でYDLIDARを使えるように環境構築した.
詳しくは以下を参照されたい.
本記事では,ROS1(Noetic)-> ROS2(Humble)の環境変更に伴って,同様にYDLIDARを使うためのまとめである.
ROS2でのYDLIDAR
ROS1のとき同様,YDLIDARがgithubでそれ用のパッケージを用意してくれていたみたいである
これで,また簡単に環境が構築できると思ったが,現実にはそうはいかなかった.
ROS2 Humbleにまだ対応していないためか,ビルドが通らない.以下では順を追ってどこでうまくいかず,どのように解決したのかについて記述する.
環境構築
まず,公式GitHubからレポジトリをROS2のワークスペースに持ってくる.
git clone https://github.com/YDLIDAR/ydlidar_ros2_driver.git
早速ビルド
cd ydlidar_ros2_ws
colcon build --symlink-install
が,ここでエラーが発生!
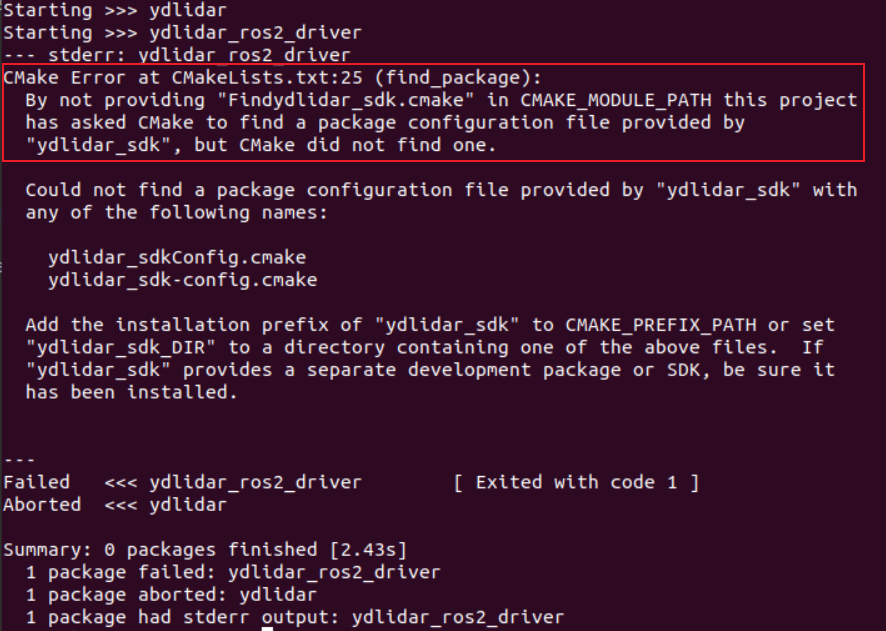
これは,レポジトリのREADMEでも書いてあったもので,想定済みのエラーである.単にydlidar_sdkがないとのことなので,これを別でインストールしてくる必要があるとの催促がある.
YDLidar-SDKの構築
以下のレポジトリに従って,構築していく.
sudo apt install cmake pkg-config
sudo apt-get install swig
sudo apt-get install python3-pip
早速ビルドする.
git clone https://github.com/YDLIDAR/YDLidar-SDK.git
mkdir YDLidar-SDK/build
cd YDLidar-SDK/build
cmake ..
make
sudo make install
cd YDLidar-SDK
pip install .
これにより,~/YDLidar-SDK/build内にテストプログラムが生成されているので,それで接続チェックをする.YDLIDAR X2をRaspberry PiのUSBポートに接続.以下のコマンドにて権限を付与.
sudo chmod 777 /dev/ttyUSB0
人によって,ttyUSB0の数字は変わるかもしれない.私の環境では,Raspberry PiのUSBポートにYDLIDAR X2のみを接続しているため分かりやすい.
テストを実行
cd ~/YDLidar-SDK/build
./tri_test
テスト結果
今回使用しているLiDARはBaudrateが115200なので,0番を選択して,通信は一方通信yesと選択することで,読みにいってくれている.
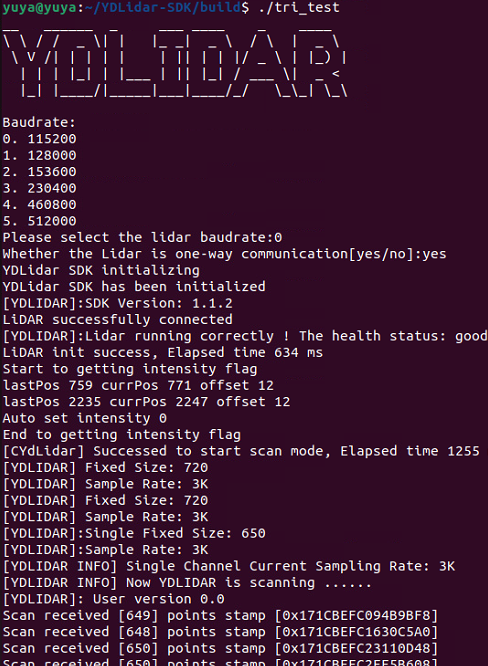
接続完了後,スキャンデータを受け取っていることがログから確認できる.
ydlidar_ros2_driverの構築
失敗(修正前)
では,準備も整い早速ビルドしてみる
colcon build --symlink-install
だが,別の内容でビルドエラー!ここから5時間以上の奮闘...

上記のエラー内容を見ると,どうもプログラムがおかしそうだということで修正を試みた.
修正箇所はエラー内容から把握するに,同じようなところで21箇所あるようだ.
node->declare_parameter("port");
ただ,何が問題であるかは分からなかったため,とりあえずdeclare_parameter関数を調べた.
同じようなエラーで困っているというIssueを見つけた.
どうもROSのディストリビューションによって作り方が異なるのか,バージョンがあっていないからバージョンをちゃんと合わせて使ってみてという回答を見た.そのため,そのGitHubにおいてHumble仕様ではどのようにdeclare_parameter関数が使われているのか調べると,以下のようにあった.
node->declare_parameter<std::string>("port");
問題箇所との違いは,関数名と引数の間に型を置いているのかどうかだけである.
これが原因であった.すべての箇所をそれぞれふさわしいデータ型に合わせて編集した.
文字型 -> <std::string>
整数型 -> <std::int16_t>
小数型 -> <std::float_t>
論理型 -> <bool>
成功(修正後)
colcon build --symlink-install
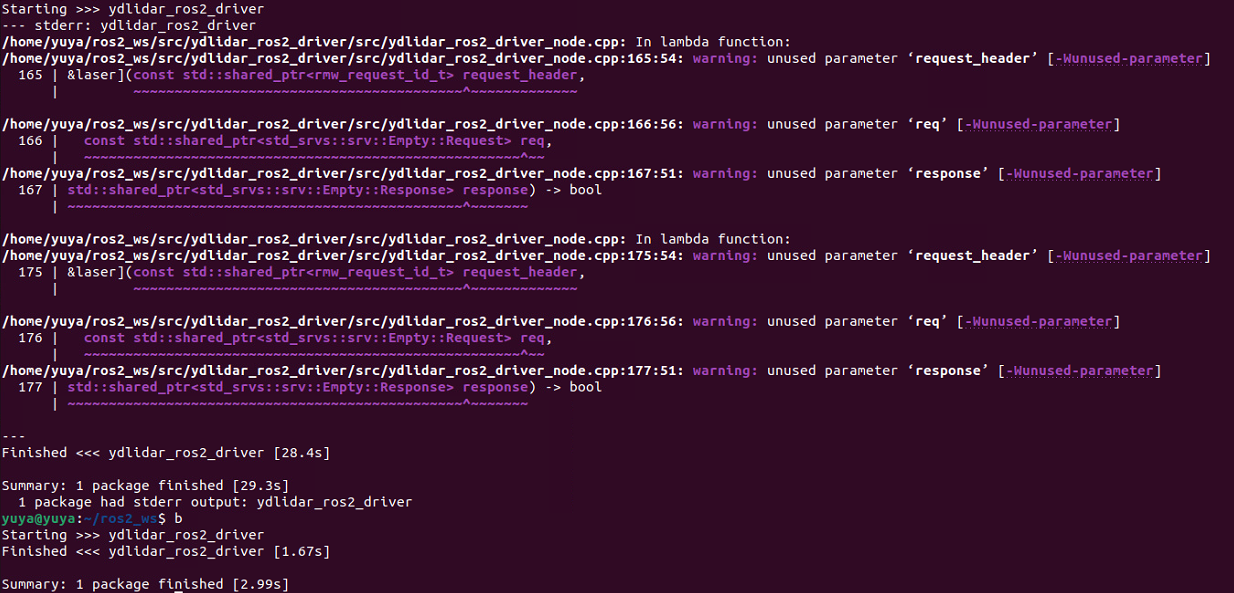
見事ビルドに成功!一度目のビルドで少し警告は出てくるが,2回目以降出てこない.内容は,単に使っていない変数がありますよとのことなので,特に気にすることもないと思われる.
検証
以下のようにYDLidarに合わせた設定をyamlファイルに書き込んでおく.
ydlidar_ros2_driver_node:
ros__parameters:
port: /dev/ttyUSB0
frame_id: laser_frame
ignore_array: ""
baudrate: 115200
lidar_type: 1
device_type: 0
sample_rate: 3
abnormal_check_count: 4
resolution_fixed: true
reversion: false
inverted: true
auto_reconnect: true
isSingleChannel: true
intensity: false
support_motor_dtr: true
angle_max: 180.0
angle_min: -180.0
range_max: 12.0
range_min: 0.1
frequency: 5.0
invalid_range_is_inf: false
この設定については,次の記事を参考にしている.
launchファイルも上記の記事に従って,編集しているため参照されたい.
実行
ros2 launch ydlidar_ros2_driver ydlidar_launch_view.py
うまくyamlファイルが反映されていない時は,再度colcon buildしてから実行を試みると良い.
上記のコマンドは,Rviz上でYDLIDAR X2で取得したレーザトピックを表示してくれる設定で,YDLIDARの起動とRvizの起動をしてくれる.その時の様子を動画像で,下に示す.
感想
今回は,思った以上に大変な作業であった.久しぶりにデバッグの地獄を垣間見れた感じであった.ただ,5時間でうまくいったため,それは良かった.これで,最新のROS2(Humble)でも手持ちのLiDARを動かせるようになった.ここからは,Twitterで教えてもらったLiDARだけでのSLAMというものをしてみたい.非常に楽しみである.
ここを参考にするとよいみたい.ちょうど,YDLidarだけど,ROS1なので,これもROS2仕様にできたらと思う.
参考文献